BÀI GIẢNG
Phần Cứng Của CPU
MỤC LỤC
1. GIỚI THIỆU CHUNG .............................................................................3
2. MÔ TẢ KĨ THUẬT ..................................................................................4
2.1 THIẾT KẾ MẠCH ..............................................................................................................................4
2.2 MÔ TẢ PHẦN CỨNG CPU .............................................................................................................. 13
2.3 MÔ TẢ THIẾT KẾ CÁC PHẦN KHÁC ............................................................................................ 15
2.4 THIẾT KẾ PHẦN MỀM ................................................................................................................... 16
2.5 CÁC BƯỚC KIỂM TRA ................................................................................................................... 17
3. KẾT QUẢ ĐẠT ĐƯỢC VÀ PHÂN TÍCH LỖI .................................... 18
4. KẾT LUẬN ............................................................................................. 22
5. MỞ RỘNG ĐỀ TÀI ................................................................................ 22
6. TÀI LIỆU THAM KHẢO ...................................................................... 23
7. PHỤ LỤC ................................................................................................ 23
7.1 DANH SÁCH THIẾT BỊ ................................................................................................................... 23
7.2 MÃ NGUỒN .................................................................................................................................... 24
7.3 CÁC DATASHEET .......................................................................................................................... 40
1. GIỚI THIỆU CHUNG
Vi xử lý (viết tắt là µP hay uP), đôi khi còn được gọi là bộ vi xử lý, là một linh
kiện điện tử máy tính được chế tạo từ các tranzito thu nhỏ tích hợp lên trên một vi mạch
tích hợp đơn. Khối xử lý trung tâm (CPU) là một bộ vi xử lý được nhiều người biết đến
và được ví như bộ não của máy tính nhưng ngoài ra nhiều thành phần khác trong
máy tính cũng có bộ vi xử lý riêng của nó, ví dụ trên cạc màn hình, ổ đĩa cứng…
cũng có các bộ bộ vi xử lý.
Vi điều khiển có thể được coi là một máy tính được tích hợp trên một chíp, nó
thường được sử dụng để điều khiển các thiết bị điện tử. Vi điều khiển, thực chất, là
một hệ thống bao gồm một vi xử lý có hiệu suất đủ dùng và giá thành thấp (khác với
các bộ vi xử lý đa năng dùng trong máy tính) kết hợp với các khối ngoại vi như bộ
nhớ, các module vào ra, ADC, DAC, timer, ngắt...Ở máy tính thì các mô đun
thường được xây dựng bởi các chíp và mạch ngoài.
Vi điều khiển thường được dùng để xây dựng các hệ thống nhúng. Nó xuất hiện
khá nhiều trong các dụng cụ điện tử, thiết bị điện, máy giặt, lò vi sóng, điện thoại, đầu đọc
DVD, thiết bị đa phương tiện, dây chuyền tự động, v.v.
Hầu hết các vi điều khiển ngày nay được xây dựng dựa trên kiến trúc Harvard,
kiến trúc này định nghĩa bốn thành phần cần thiết của một hệ thống nhúng. Những
thành phần này là lõi CPU, bộ nhớ chương trình (thông thường là ROM hoặc bộ nhớ
Flash), bộ nhớ dữ liệu (RAM), một hoặc vài bộ định thời và các cổng vào/ra để giao tiếp
với các thiết bị ngoại vi và các môi trường bên ngoài - tất cả các khối này được thiết
kế trong một vi mạch tích hợp. Vi điều khiển khác với các bộ vi xử lý đa năng ở chỗ
là nó có thể hoạt động chỉ với vài vi mạch hỗ trợ bên ngoài.
Đề tài thiết kế xe chạy theo đường vẽ sẵn được chúng em thực hiện dựa trên nền
kiến thức về mạch điện tử, vi xử lý nói chung và vi điều khiển họ 8051 nói riêng
được thầy giáo hướng dẫn trên lớp. Thực hiện đề tài này là tiền đề để chúng em
nắm được những kiến thức cơ bản về vi điều khiển 8051, từ đó tạo cơ sở để tiếp
tục nghiên cứu những họ vi điều khiển khác như AVR, PIC, ARM… phục vụ trong
quá trình học tập và làm việc sau này.
Chúng em chân thành cảm ơn thầy Nguyễn Hồng Quang đã hướng dẫn chúng
em hoàn thành bài tập này.
Nhóm 2 – TĐH 4 – K50
2. MÔ TẢ KĨ THUẬT
2.1 THIẾT KẾ MẠCH
Hai mạch chính sử dụng trong bài tập này là mạch SENSORS để dò đường và
mạch VI XỬ LÝ VÀ ĐỘNG CƠ để thu tín hiệu, xử lý và đưa ra tín hiệu điều
khiển hai động cơ để dẫn hướng. Ngoài ra, để nạp chương trình cho vi điều khiển,
chúng em sử dụng mạch nạp ISP loại đơn giản tự làm theo sơ đồ trên mạng
Internet.
a) MẠCH SENSORS
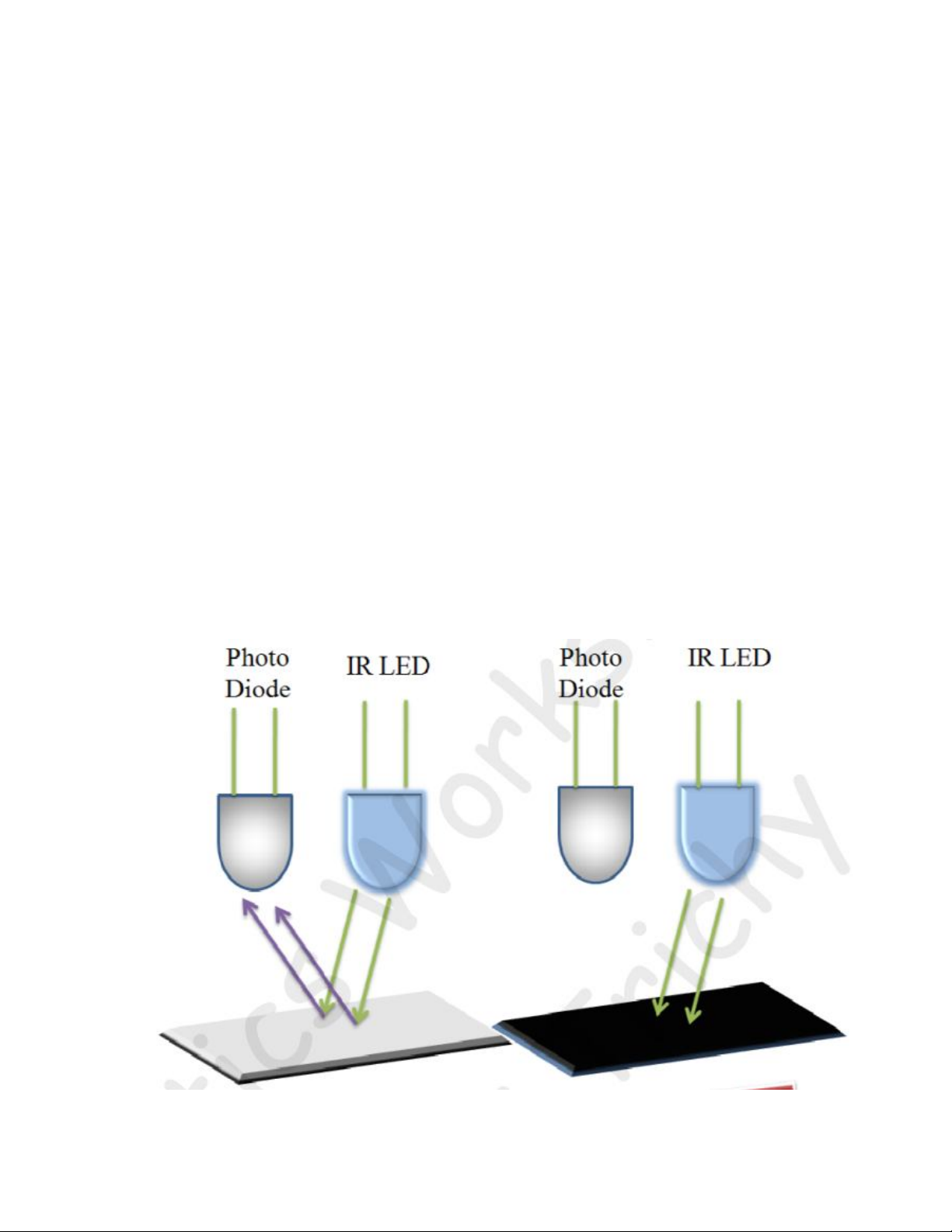
Đường đi của xe được vẽ bằng vạch đen nằm trên nền trắng. Để xe nhận ra
được đường đi, chúng em sử dụng các cặp led thu phát hồng ngoại đặt gần nhau.
Các led phát phát ra ánh sáng đỏ, các led thu có điện trở phụ thuộc vào có nhận
được ánh sáng phản xạ từ đường đi hay không.
Khi cặp thu phát ở vị trí nền trắng, ánh sáng từ led phát phát ra phản xạ trên nền
trắng và tới led thu. Led thu thu được ánh sáng này thì điện trở giảm xuống, điện
áp ở cực Anot của led thu gần về 0. Ngược lại, ở vị trí vạch đen, ánh sáng từ led
phát phát ra không phản xạ lại được do bị vạch đen hấp thụ. Led thu không nhận
được ánh sáng này nên điện áp ở cực Anot của nó gần bằng 5 V. Điện áp ra từ led
thu được đem so sánh với điện áp chuẩn đã được tinh chỉnh hợp lý qua IC LM324
để cho ra mức logic 0-1, đưa vào vi điều khiển xử lý.
Hình ảnh minh họa như sau:
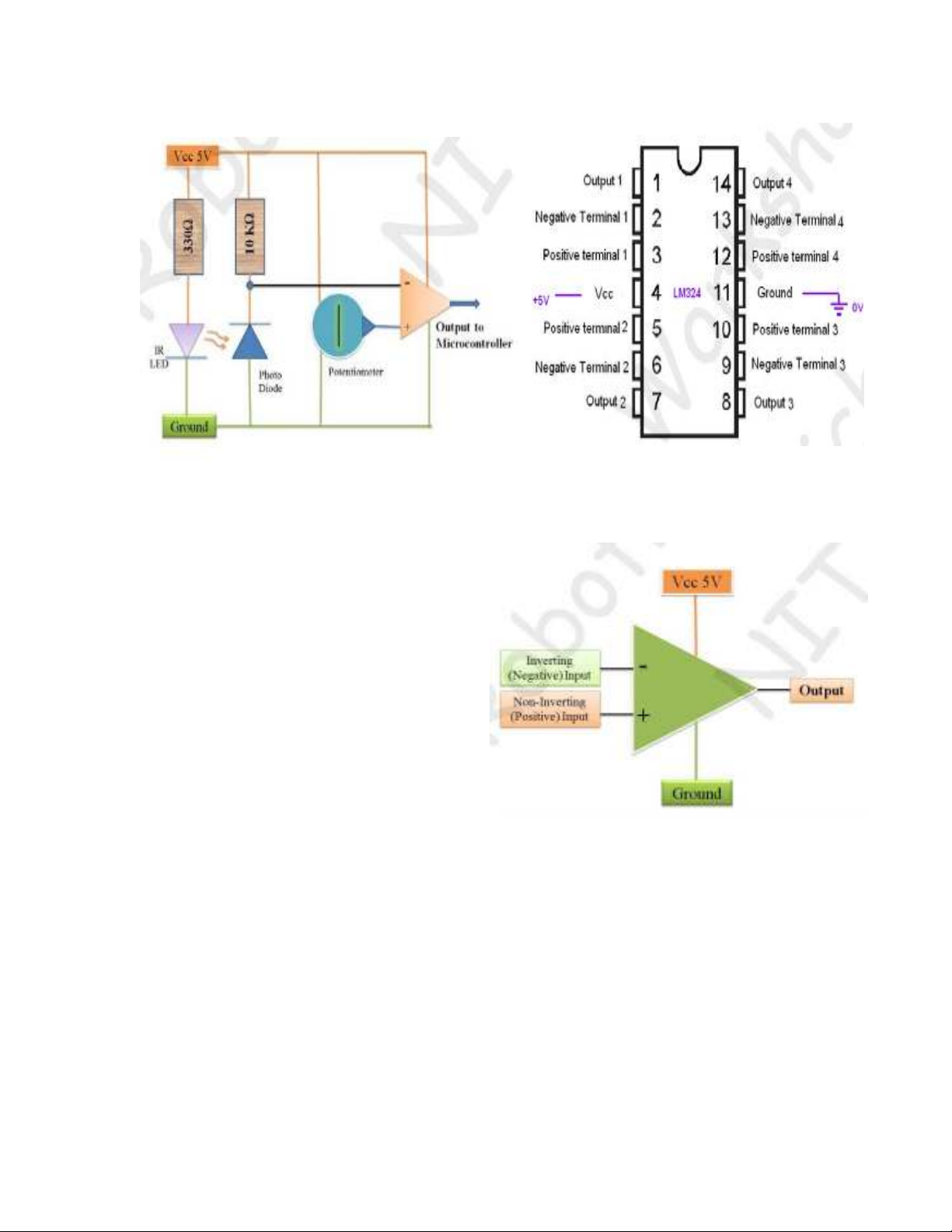
IC LM324 gồm 4 bộ so sánh.
Mỗi bộ so sánh được minh họa như
hình bên. Trong đó, đầu vào đảo nối với
cực Anot của led thu và đầu vào không
đảo nối với điện áp so sánh từ chiết áp.
Khi led ở ngoài nền trắng, mức điện
áp trên led thu đo được là 3.0V, ngược
lại, mức điện áp thu đo được khi bắt vào
vạch đen là 4.6 V. Điện áp so sánh (Vref)
được đặt qua biến trở 10k là 3.8 V.
Khi ở ngoài nền trắng:
Vled thu <Vref nên Output=1
Khi bắt vạch đen:
Vled thu >Vref nên Output=0
Để bắt đường được tốt, chúng em sử dụng 6 cặp led thu phát được bố trí như
sau (LT: Led thu; LP: Led phat):
LT3
LP3
LT1 LT2 LT5 LT6
LP1 LP2 LP5 LP6
LT4
LP4













![Bài giảng Tin học đại cương Trường Đại học Lâm Nghiệp [Năm mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/85781779160272.jpg)
![Giáo trình Cấu trúc dữ liệu và giải thuật - TS. Đào Thị Hường [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/49281779160273.jpg)





![Câu hỏi ôn tập Đồ hoạ máy tính [năm/khóa/chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/48771779155952.jpg)





%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)