Báo cáo bài tập PLC – Giảng Viên: Nguyễn Thanh Hải
I
Mục Lục
1. TỔNG QUAN 1
1.1. ĐẶT VẤN ĐỀ 1
1.2. MỤC TIÊU ĐỀ TÀI 1
2. MÔ TẢ HỆ THỐNG 2
2.1. MÔ TẢ QUY TRÌNH CÔNG NGHỆ 2
2.2. LỰA CHỌN THIẾT BỊ VÀO 3
2.2.1. Lựa chọn cảm biến 3
2.2.2. Lựa chọn công tắc hành trình 6
2.2.3. Lựa chọn nút nhấn 8
2.3. LỰA CHỌN NGÕ RA 8
2.3.1. Lựa chọn động cơ 8
2.3.2. Lựa chọn đèn 9
2.3.3. Lựa chọn buzzer 10
2.3.4. Lựa chọn CONTACTOR 3 pha 11
2.4. LỰA CHỌN PLC 11
2.5. SƠ ĐỒ NỐI DÂY 13
3. THIẾT KẾ PHẦN MỀM 14
3.1. YÊU CẦU THIẾT KẾ 14
3.2. SƠ ĐỒ TRẠNG THÁI 14
3.3. CHƯƠNG TRÌNH PLC 15
4. KẾT QUẢ MÔ PHỎNG 18
5. KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN 23
5.1. KẾT LUẬN 23
5.2. HƯỚNG PHÁT TRIỂN ĐỀ TÀI 23
6. TÀI LIỆU THAM KHẢO 24

Báo cáo bài tập PLC – Giảng Viên: Nguyễn Thanh Hải
1
1. TỔNG QUAN
1.1. Đặt vấn đề
Các hệ thống đóng cửa garage tự động đòi hỏi phải có sự an toàn tuyệt đối, độ
chính xác cao, hiệu xuất lớn, dễ giám sát, chịu được rung động, môi trường làm việc
ô nhiễm,…. Để thực hiện các yêu cầu trên thì các công ty, nhà ở thường sử dụng công
nghệ lập trình PLC, với những ưu điểm vượt trội mà các bộ điều khiển cổ điển dùng
dây nối và relay không thể nào so sánh được như lập trình dễ dàng, gọn nhẹ, dễ dàng
di chuyển, lắp đặt, dể bảo quản và sửa chữa, khả năng xử lý nhanh, hoạt động tốt
trong môi trường công nghiệp,….
1.2. Mục tiêu đề tài
Mục tiêu của đề tài là nghiên cứu, thiết kế và giải quyết các hệ thống tự động
đóng cửa garage sử dụng PLC của Mitsubishi sử dụng phương pháp ladder để lập
trình. Hệ thống dùng trong các bãi giữ xe, nhà ở hay trong trong các nhà máy xí
nghiệp, bệnh viện,....
Báo cáo bài tập PLC – Giảng Viên: Nguyễn Thanh Hải
2
2. MÔ TẢ HỆ THỐNG
2.1. Mô tả quy trình công nghệ
Cửa garage tự động hoạt động trên nguyên lý dùng các cảm biến quang để xác
định có xe và tác động động cơ quay thuận nghịch để đóng, mở cửa. Sử dụng công
tắc hành trình tác động để ngừng quay động cơ. Từ nguyên lý làm việc trên ta thấy
muốn hệ thống hoạt động được cần có động cơ 3 pha, công tắc hành trình loại thường
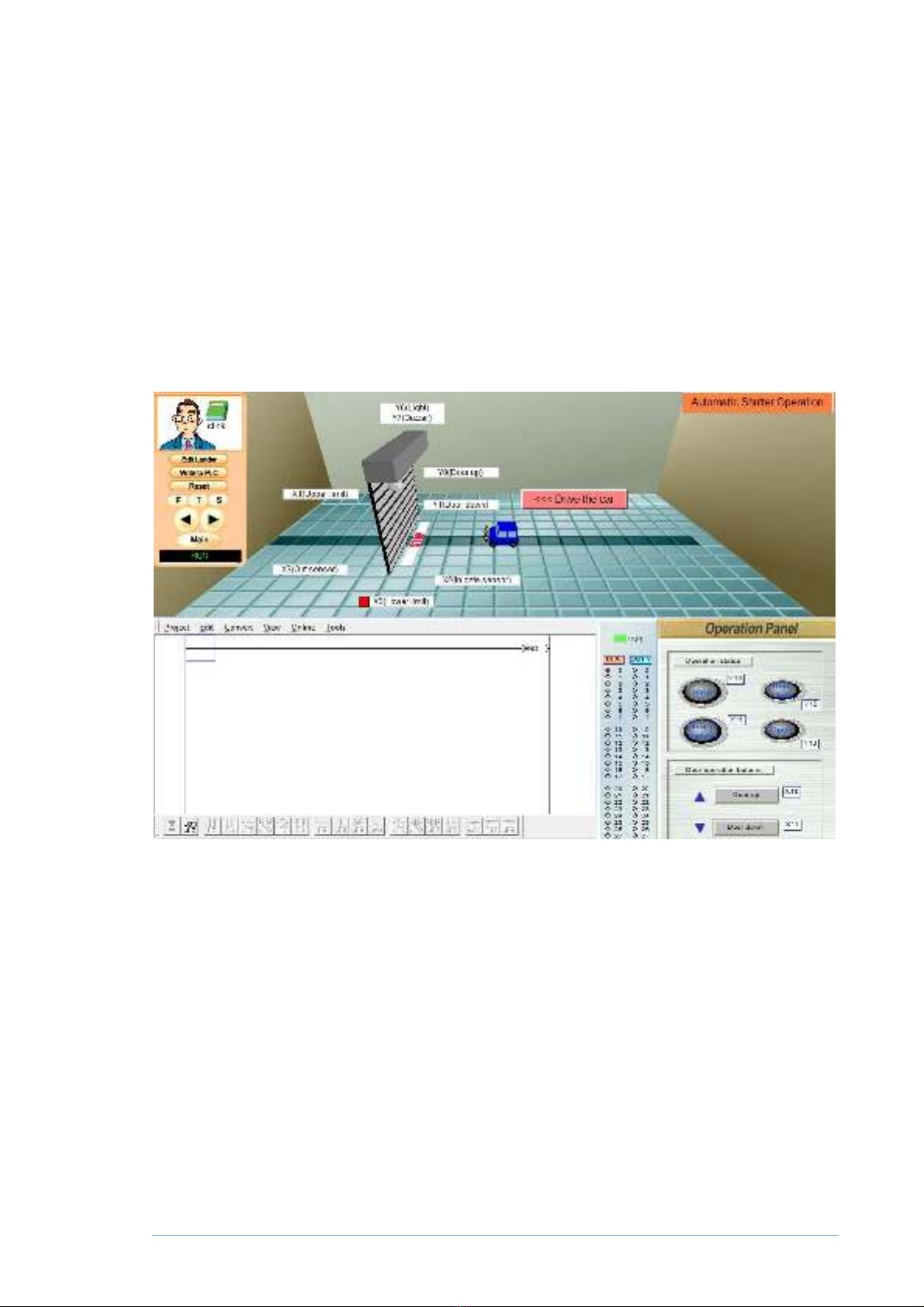
hở, cảm biến quang loại thu phát. Sau đây là chu trình làm việc như hình 2.1.
Hình 2.1: Hệ thống đóng, mở cửa garage tự động
Khi bật công tắc hệ thống đóng cửa và kiểm tra xem có xe hay không. Khi có
xe đến cảm biến X2, đèn Y6 sáng lên, cửa garage sẽ đi lên và lúc này Buzzer Y7 hoạt
động. Cửa garage vẫn đi lên cho đến khi tác động công tắc hành trình thì dừng, lúc
này buzzer cũng ngừng hoạt động. Xe đi qua cửa qua cảm biến X3, đèn Y6 tắt, cửa
garage sẽ đi xuống và lúc này buzzer Y7 hoạt dộng. Cửa garage vẫn đi xuống cho
đến công tắc hành trình dưới được tác đồng thì dừng, lúc này buzzer cũng ngừng hoạt
động. Đồng thời ta kết hợp hai nút nhấn UP là X10 và DOWN là X11 để mở hoặc
đóng cửa, nhưng khi có xe trong vùng xác định giữa X2 và X3 thì hai nút nhấn này
không thể tác động.
Báo cáo bài tập PLC – Giảng Viên: Nguyễn Thanh Hải
3
2.2. Lựa chọn thiết bị vào
Các thiết bị được sử dụng ở ngõ vào PLC:
- 2 cảm biến quang.
- 2 công tắc hành trình.
- 2 nút nhấn.
2.2.1. Lựa chọn cảm biến
Các loại cảm biến có thể dùng Cảm biến quang điện, cảm biến điện
cảm,….
Ở đề tài này chọn cảm biến quang điện để xác định vị trí và sự dịch
chuyển của xe ô tô.
Mô hình đóng mở cửa garage tự động dùng 2 cảm biến quang.
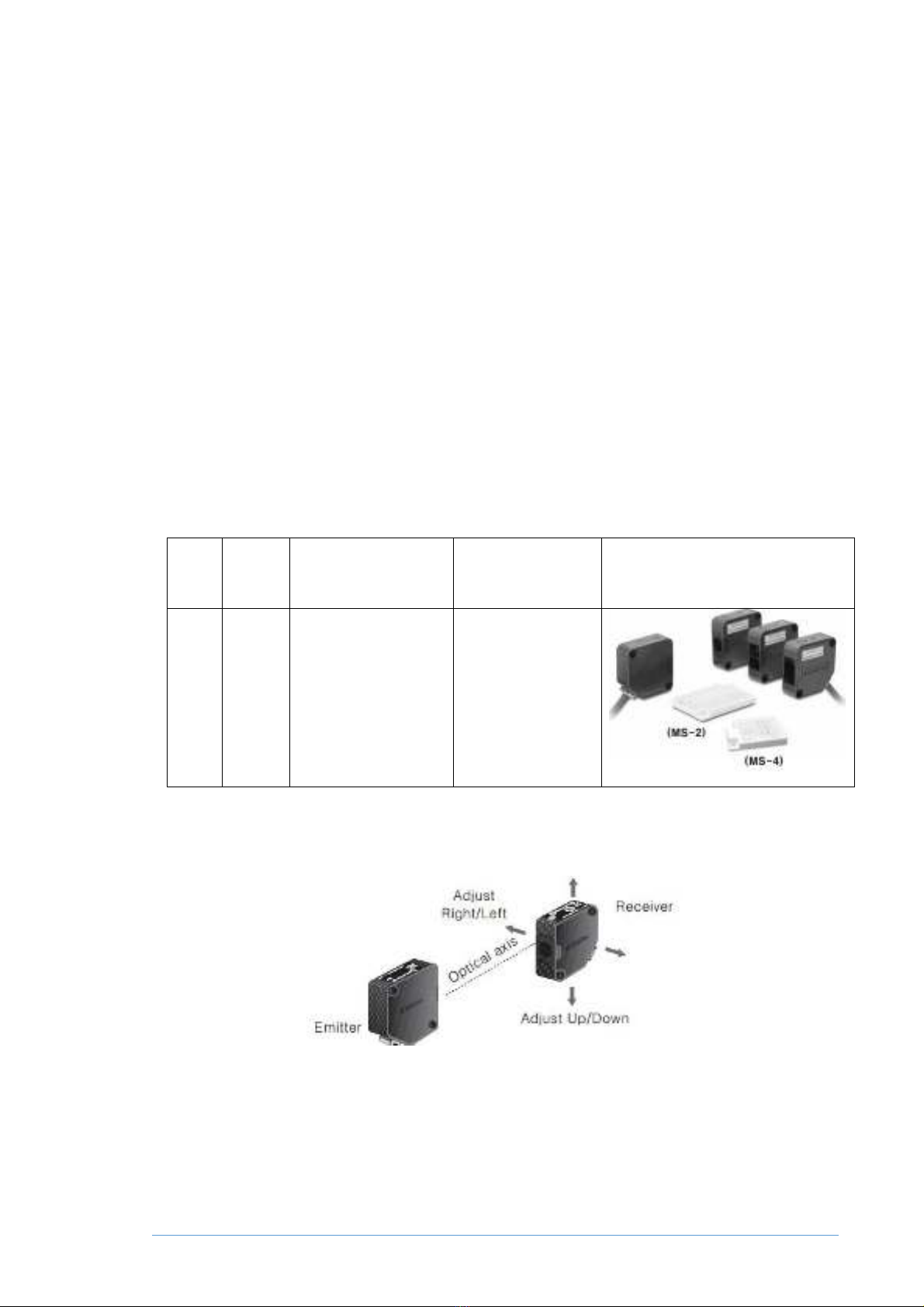
Bảng 2.1: Lựa chọn cảm biến
STT
Số
lượng
Cảm biến
Công dụng
Hình ảnh
1
2
Cảm biến phát
hiện vật thể.
Tên cảm biến :
BEN10M-TDT
Phát hiện vật
chuyển động
trong tầm của
cảm biến (10m)
Cấu tạo và thông số kĩ thuật của cảm biến BEN10M-TDT.
Cảm biến quang điện thu-phát thực tế như hình 2.2.
Hình 2.2: Cặp thu phát cảm biến
Đầu ra là NPN, có 3 dây nối. NPN cho phép dòng điện trong cảm biến đi vào
điện áp chung. Bình thường đầu ra của cảm biến là một Transistor có vai trò như một
khóa (khi sụt áp). Nếu cảm biến vừa phát hiện được đối tượng sẽ tạo ra dòng tác động
Báo cáo bài tập PLC – Giảng Viên: Nguyễn Thanh Hải
4
trực tiếp tới Transistor NPN. Khi không có dòng tác động Transistor không cho phép
dòng chạy trong cảm biến. Khi có tác động Transistor sẽ mở khóa cho phép dòng
chạy trong cảm biến tới cực chung.
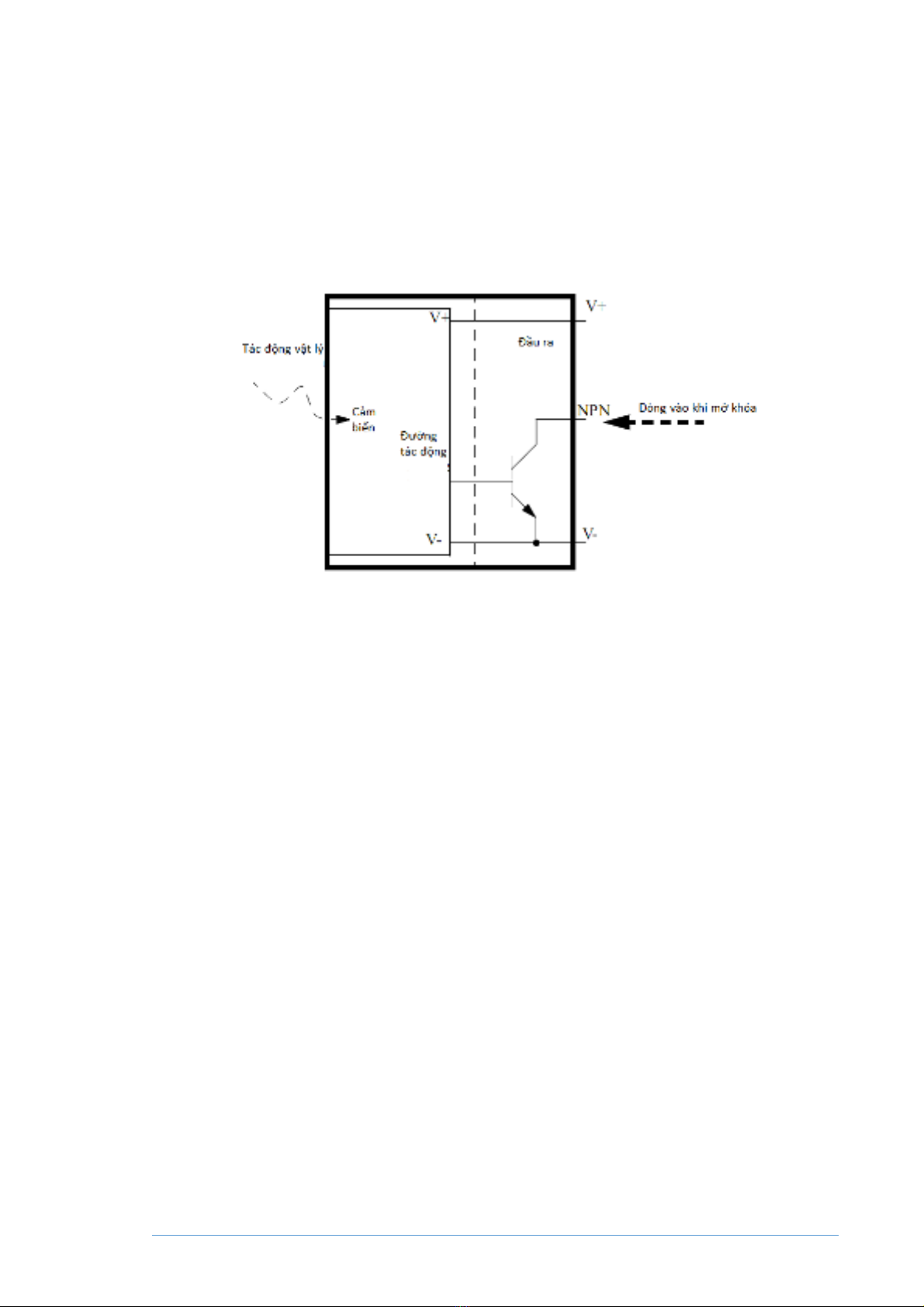
Sau đây là nguyên lý hoạt động của PLC như hình 2.3:
Hình 2.3: Sơ đồ kết nối cảm biến với PLC
Cảm biến chịu phản ứng của các tác nhân vật lý. Nếu cảm biến không hoạt
động, điện áp đường tác động thấp, khi đó Transistor khóa. Có nghĩa là đầu ra NPN
không có dòng vào/ra. Khi cảm biến hoạt động làm cho đường tác động có điện áp
cao, Transistor mở khóa và tác động đóng khóa. Dòng chạy từ cảm biến tới đất. Điện
áp ở đầu ra của NPN giảm xuống -V.
Kích thước 18mm.
Ngõ vào 10 – 24 VDC.
Khoảng cách phát hiện 10m.
Dòng định mức 40mA.
Vỏ làm bằng chất liệu ABS.
Chống nhiễu tốt.
Gọn và tiết kiệm chỗ.
Bảo vệ chống ngắn mạch và nối cực nguồn.
Chế độ hoạt động Ligh-ON.