8/26/2012
1
Chapter 4 – Auto Control
Chapter 4 - Automatic Control
• What Automatic Control is,
• Automatic Control Theory,
• Process Control,
• Stability
• Controllers:
– PID Controllers,
– Optimal Control,
– Adaptive Control
–…
Chapter 4 – Auto Control
4.1. Auto Control Definition
•Automatic control: is the research area and
theoretical base for mechanization and automation,
employing methods from mathematics and
engineering.
• A central concept is that of the system which is to be
controlled, such as a generator’s field wild (kích thích máy
phát điện), governor or an entire ballistic missile (tên lửa đạn
đạo)
• The systems studied within automatic control are
mostly the linear systems.
8/26/2012
2
Chapter 4 – Auto Control
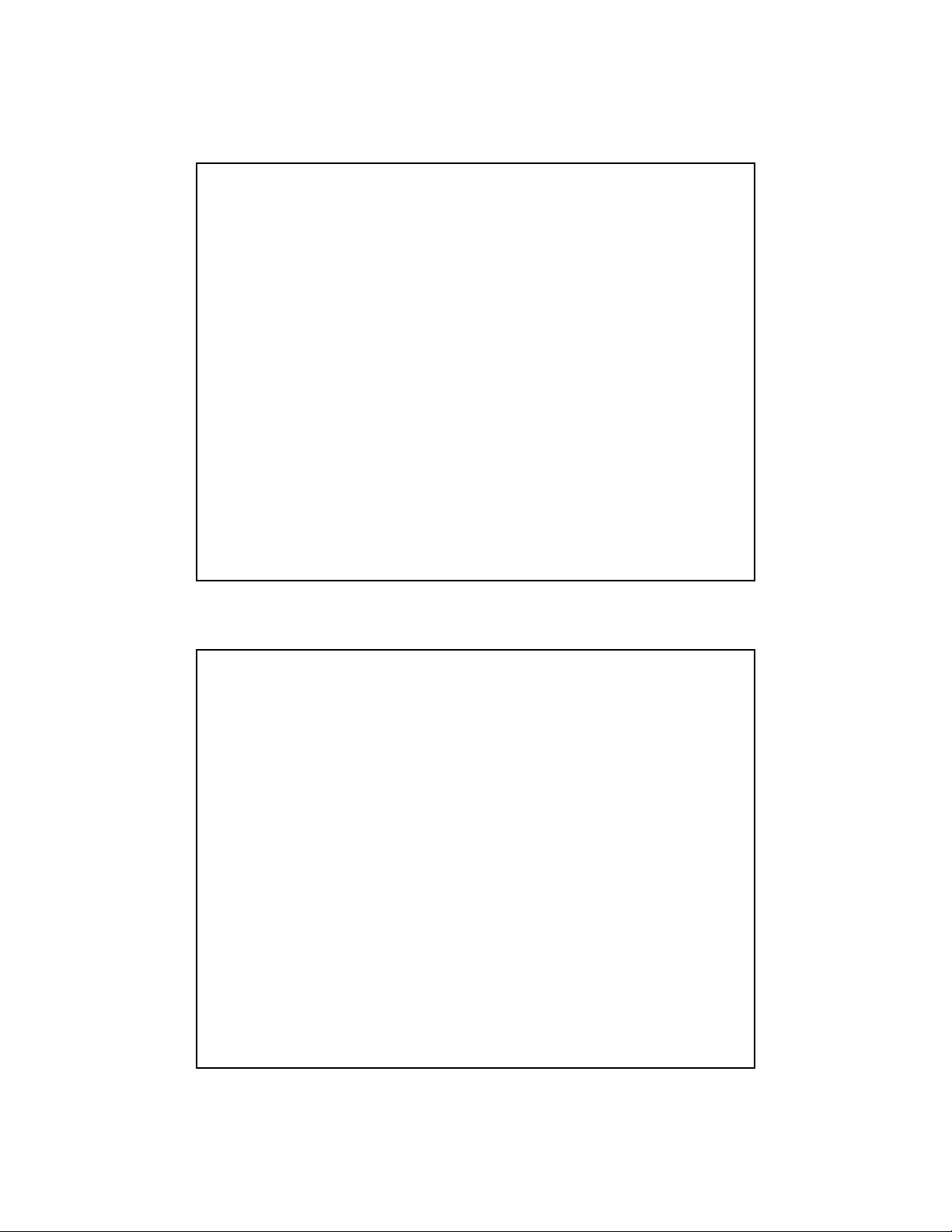
4.1. Auto Control Definition
Fig. 4.1. Block diagram of Closed Loop Controller
Chapter 4 – Auto Control
• Automatic control systems are composed of three
components:
–Bộ cảm biến:đo lường trạng thái vật lý như nhiệt
độ hay mức chất lỏng ...
–Đáp ứng: hệ thống điện/cơ đơn giản hoặc các bộ
điều khiển kỹ thuật số hoặc máy tính.
–Thiết bị truyền động/chấp hành: khâu thực hiện
mang tính cơ điện. Bộ đáp ứng xử lý các tín hiệu
từ sensor cho ra các lện đến các thiết bvị chấp
hành,
4.1. Auto Control Definition
8/26/2012
3
Chapter 4 – Auto Control
• 4.2.1. An example:
– Open-loop Controller (system): Car, Missile w/o feedback
– Closed-loop ~:
•Trong kỹ thuật và lý thuyết điều khiển giải
quyết với các hành vi của hệ thống động học.
Đầu ra mong muốn của một hệ thống được gọi
là Reference.
•Khi một hoặc nhiều biến đầu ra của một hệ
thống cần phải tuân theo Reference nhất định
theo thời gian, bộ điều khiển xử lý các yếu tố
đầu vào để đạt được hiệu quả mong muốn ở đầu
ra.
4.2. Control Theory
Chapter 4 – Auto Control
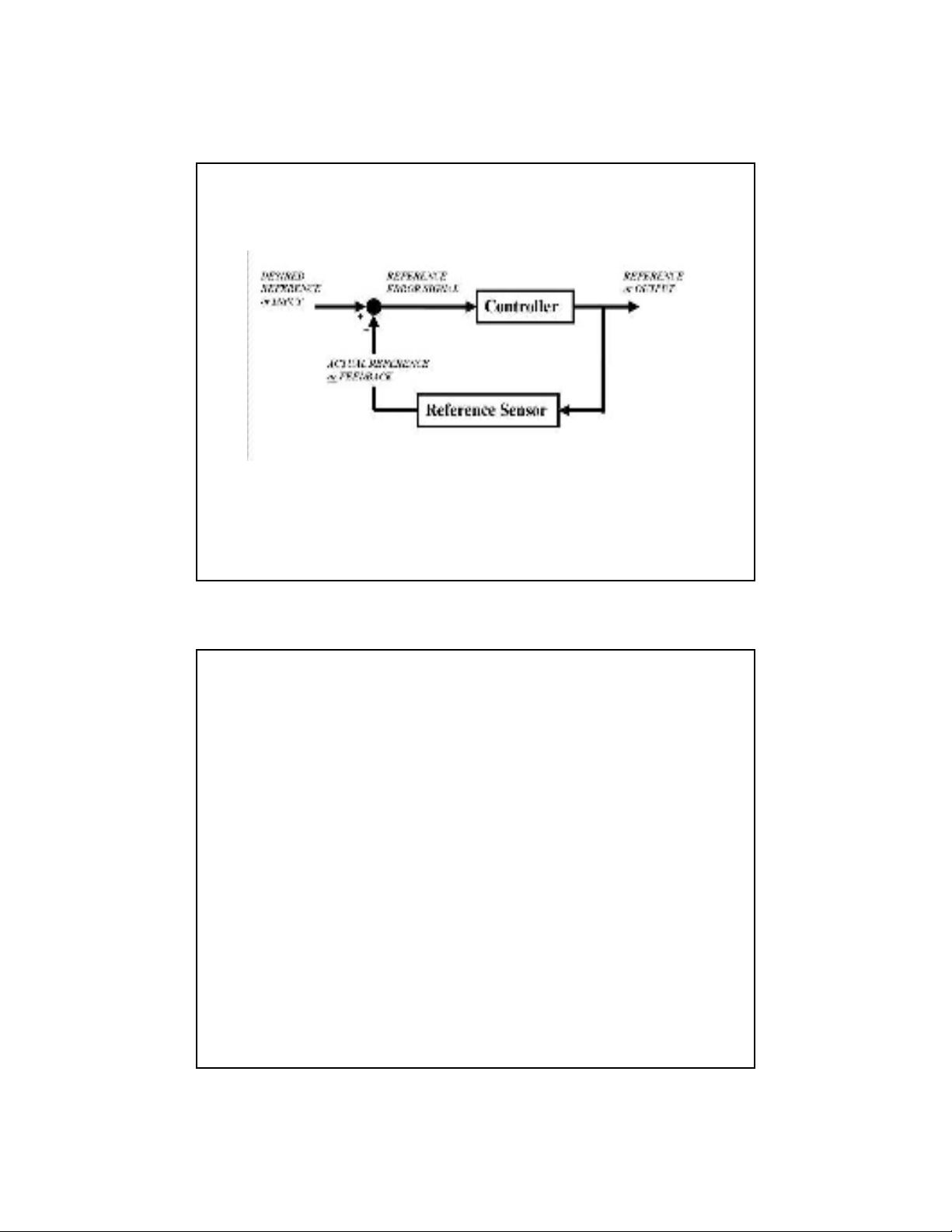
4.2.1. Classical control theory: the closed-loop
controller
–Một bộ điều khiển vòng kín sử dụng thông
tin phản hồi để điều khiển trạng thái hoặc
kết quả đầu ra của một hệ thống động
(System động học: tín hiệu đầu vào qua xử
lý tạo ra kết quả đầu ra làm thay đổi chính
quá trính đó).
–Bộ điều khiển vòng kín có các ưu điểm:
4.2. Control Theory
8/26/2012
4
Chapter 4 – Auto Control
–Loại bỏ được nhiễu
–Đảm bảo thực hiện ngay cả với mô hình không xác
định, khi mô hình không hoàn toàn đúng với thực
tế và các quá trình không ổn định có thể được ổn
định
– Làm giảm độ nhạy với sự thay đổi tham số,
cải thiện hiệu suất theo set point (Reference)
4.2. Control Theory: 4.2.1. Classical CT
Chapter 4 – Auto Control
4.2. Control Theory: 4.2.1. Classical CT
•Trong một số hệ thống vòng kín và vòng hở được sử
dụng đồng thời.
• Vòng hở là feedforward để cải thiện hiệu suất theo Set
Point.
•Bộ điều khiển vòng kín thường là bộ điều khiển PID.
8/26/2012
5
Chapter 4 – Auto Control
• Y(t) so sánh với r (t), qua bộ cảm biến đo lường.
•Bộ điều khiển C xử lý độ lệch giữa Set Point và đầu
ra để thay đổi giá trị Uđầu vào cho hệ thống xử lý P.
•Đây là loại điều khiển một vòng kín hoặc điều khiển
có phản hồi, là hệ thống đ/kh SISO;
• MIMO (Multi-Input Multi-Output), nhiều đầu vào /
đầu ra. Trong trường hợp này biến được biểu diễn
thông qua các vector thay vì các giá trị vô hướng đơn
giản. Đối với một số tham số hệ thống phân tán, các
vectơ có thể được vô hạn chiều.
4.2. Control Theory: 4.2.1. Classical CT
Chapter 4 – Auto Control
4.2. Control Theory: 4.2.1. Classical CT
•Nếu bộ đ/kh C và đối tượng P là tuyến tính và thời
gian bất biến, C (s) và P (s) không phụ thuộc vào thời
gian, các hệ thống trên có thể được phân tích bằng
biến đổi Laplace. Có các quan hệ sau:
–Y(s) = P(s) x U(s)
–U(s) = C(s) x E(s)
–E(s) = R(s) – Y(s)
•Giải Y(s) với R(s) ta được:



















![Đề thi cuối kì Nhập môn Mạng máy tính: Tổng hợp [Năm]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251110/nminhthoi53@gmail.com/135x160/38281762757217.jpg)



![Đề thi học kì 2 môn Nhập môn Mạng máy tính [kèm đáp án]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251014/lakim0906/135x160/23811760416180.jpg)

