2
Tổng quan
• Mô hình vs Ngôn ngữ
• Mô hình trạng thái
–FSM/FSMD
– HCFSM và ngôn ngữ biểu đồ
– Mô hình trạng thái lập trình (Program-State Machine (PSM) Model)
• Mô hình quá trình đồng thời
– Truyền thông
– Đồng bộ
– Thực hiện
• Mô hình luồng dữ liệu
• Các hệ thời gian thực
CuuDuongThanCong.com https://fb.com/tailieudientucntt
3
• Mô tả trạng thái xử lý của hệ thống nhúng
– Đôi khi là rất khó
• Độ phức tạp tăng khi khả năng của IC tăng
– Trong quá khứ: máy giặt, games etc.
• Vài trăm dòng lệnh
– Ngày nay: Đầu TV kỹ thuật số, điện thoại di động etc.
• Vài trăm nghìn dòng lệnh
• Trạng thái yêu cầu thƣờng không đƣợc hiểu đầy đủ khi bắt đầu
– Nhiều quá trình thực hiện lỗi do mô tả sự kiện thiếu, ko chính xác
– Tiếng Anh (hoặc ngôn ngữ khác) – điểm khởi đầu chung
• Khó mô tả chính xác hoặc đôi khi không thể
• Ví dụ: Mã điều khiển cho một ô tô – dài hàng nghìn trang...
Giới thiệu
CuuDuongThanCong.com https://fb.com/tailieudientucntt
4
Mô hình và ngôn ngữ
• Làm thế nào chúng ta ghi nhận hành vi (chính xác)?
– Chúng ta có thể nghĩ đến ngôn ngữ (C, C++), nhƣng mô hình tính toán là
mấu chốt
• Mô hình tính toán cơ bản:
– Mô hình lập trình tuần tự
• Các câu lệnh, quy tắc ghép câu lệnh, cơ chế thực hiện chúng
– Mô hình xử lý thông tin
• Nhiều mô hình tuần tự chạy đồng thời
– Mô hình trạng thái
• Cho các hệ riêng, giám sát đầu vào điều khiển, thiết lập đầu ra điều khiển
– Mô hình luồng dữ liệu
• Cho các hệ dữ liệu riêng, biến dòng dữ liệu đầu vào thành dòng dữ liệu đầu ra
– Mô hình hƣớng đối tƣợng
• Để tách phần mềm phức tạp thành đơn giản, các mục đƣợc định nghĩa
CuuDuongThanCong.com https://fb.com/tailieudientucntt
5
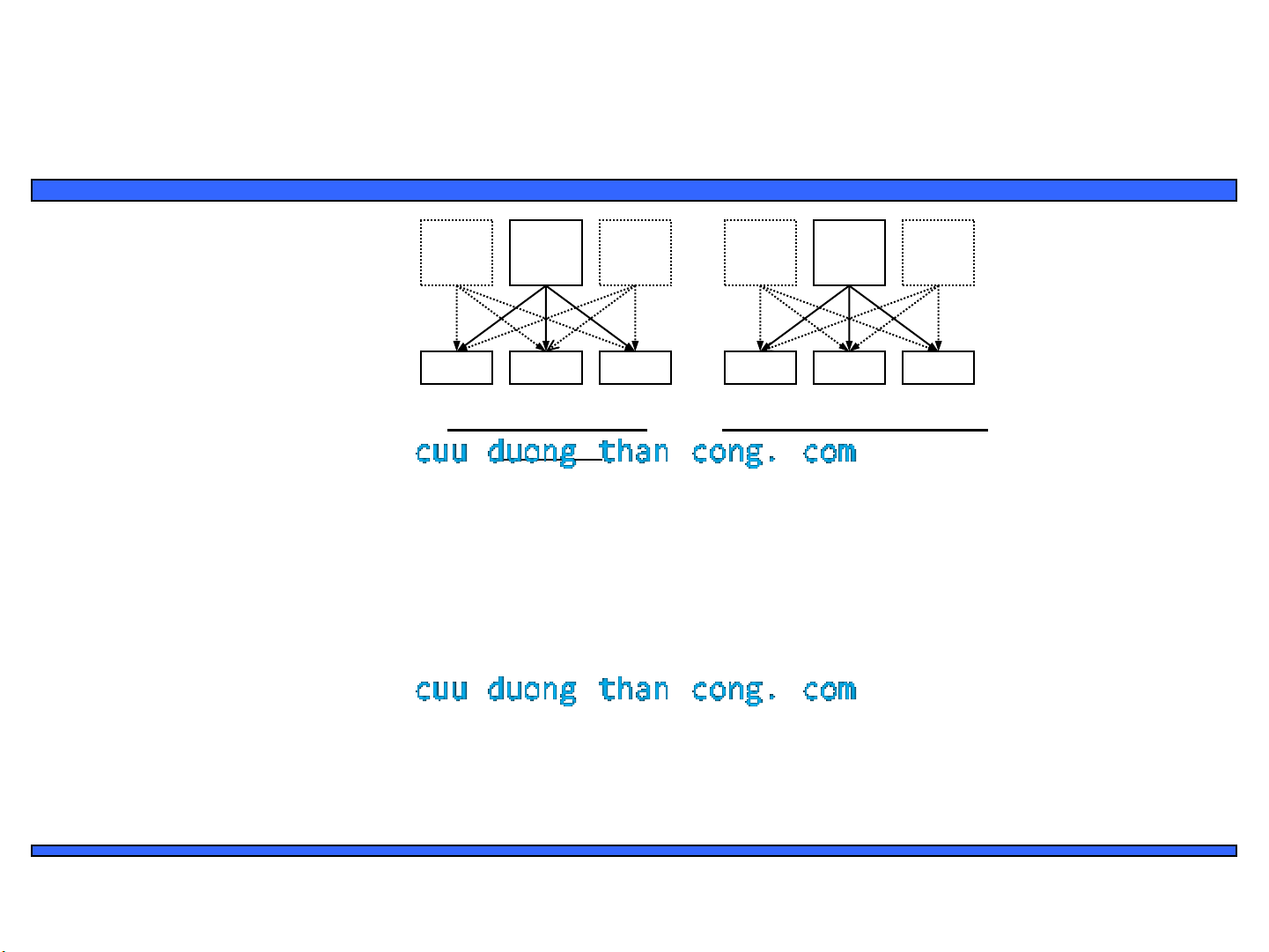
Mô hình vs ngôn ngữ
• Mô hình tính toán mô tả trạng thái của hệ
– Ghi chú khái niệm, vd công thức hay chƣơng trình tuần tự
• Ngôn ngữ để thể hiện mô hình
– Dạng duy nhất, ví dụ tiếng Anh, C
• Hiều ngôn ngữ đƣợc dùng để thể hiện một mô hình
– VD mô hình lập trình tuần tự C,C++, Java
• Một ngôn ngữ có thể thể hiện nhiều mô hình
–VD C++ → mô hình lập trình tuần tự, mô hình hƣớng đối tƣợng, mô hình trạng thái
• Các ngôn ngữ nhất định thể hiện tốt các mô hình tính toán nhất định
Mô hình
Ngôn ngữ
Recipe
SpanishEnglish Japanese
Poetry Story Sequent.
program
C++C Java
State
machine
Data-
flow
Ngôn ngữ nấu ăn –
Tiếng Anh
Chương trình tuần tự - C
CuuDuongThanCong.com https://fb.com/tailieudientucntt











![Ngân hàng đề thi trắc nghiệm Kiến trúc máy tính [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/49281779160279.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)