312
Ch¬ng 16
KHÔI PHỤC ẢNH
16.1. GIỚI THIỆU
Trong lịch sử, lĩnh vực hoạt động rộng lớn của xử lý ảnh số đã dành hết cho việc
khôi phục ảnh. Công việc này bao gồm cả nghiên cứu phát triển thuật giải lẫn
chương trình, xử lý ảnh có mục đích. Nhiều đóng góp đáng chú ý trong xử lý ảnh số
đã được thực hiện trước kia cũng như sau này.
Dựa vào khôi phục ảnh, chúng ta muốn loại bỏ hay làm giảm những suy giảm gặp
phải trong khi thu nhận ảnh số. Sự suy giảm bao gồm sự mờ do hệ thống quang học,
di chuyển đối tượng và cả nhiễu từ điện tử hay nguồn quang trắc. Trong khi khôi
phục ảnh có thể được định nghĩa bao gồm nhiều kỹ thuật đã đề cập trong Phần 1, ta
coi nó là biểu hiện của lớp các thao tác bị hạn chế nhiều hơn.
Tiêu chí cho việc khôi phục ảnh là mang lại một ảnh tương đối giống ảnh ban đầu
khi ảnh số thu được bị suy giảm. Mỗi phần tử trong chuỗi thu nhận ảnh (thấu kính,
film, bộ số hoá,...) đều có thể tạo ra suy giảm. Khôi phục từng phần ảnh bị mất chất
lượng có thể thoả mãn một khía cạnh thẩm mỹ nào đó, tuỳ thuộc vào từng ứng dụng
cụ thể. Một ví dụ cho trường hợp sau là các nhiệm vụ thu thập ảnh mặt trăng và hành
tinh trong chương trình không gian.
Trong chương này, chúng ta xem xét một vài phương pháp tiếp cận khôi phục
ảnh. Ta cũng xem xét các bài toán nhận biết hệ thống và mô phỏng nhiễu. Đối với
những tin tức chi tiết về các đối tượng, độc giả nên tham khảo tài liệu hay nghiên cứu
về lĩnh vực này.
16.1.1. Tiếp cận và mô phỏng
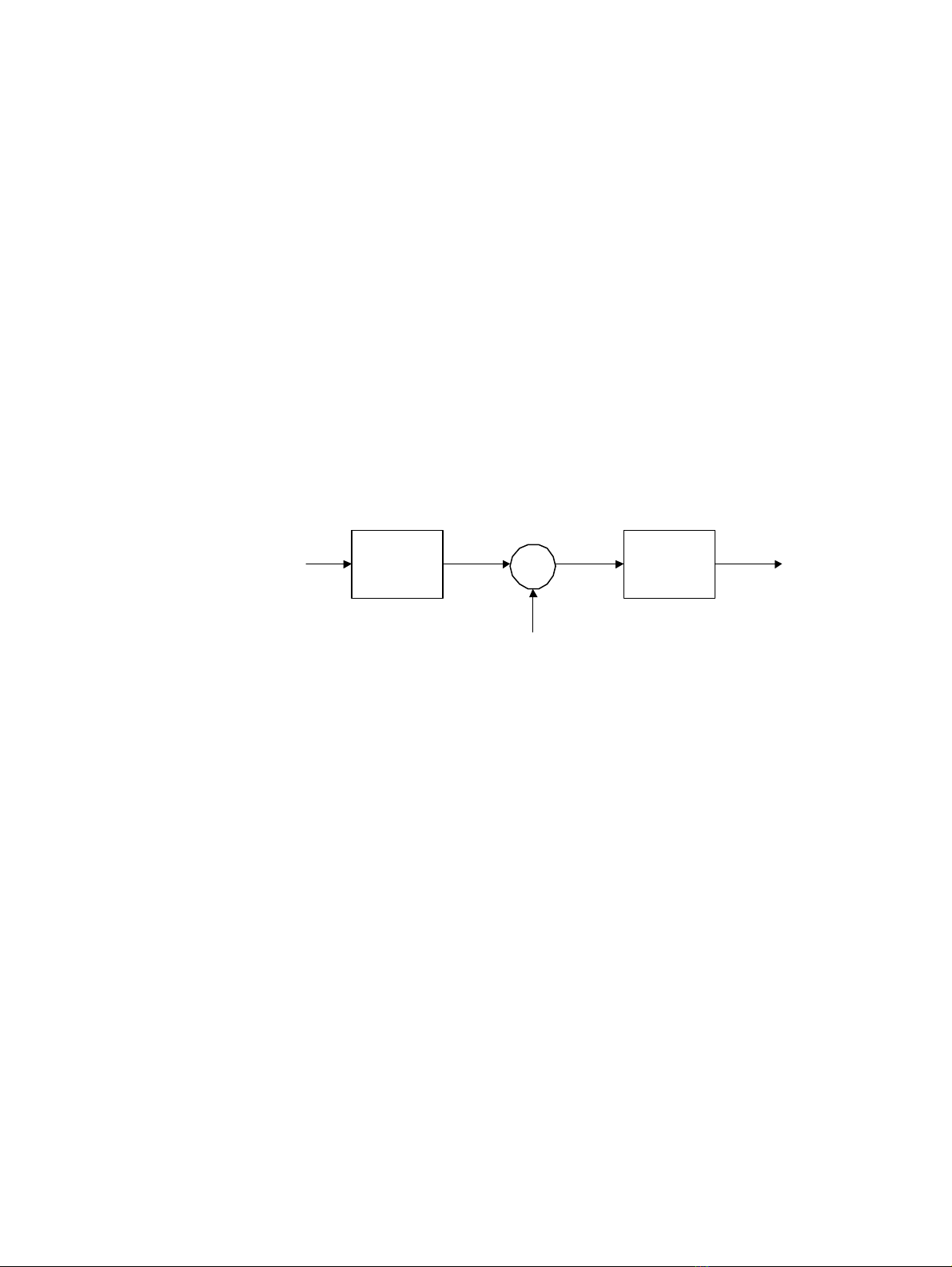
Tiến trình khôi phục ảnh bị suy giảm có thể tiếp cận theo một trong hai cách cơ
bản. Nếu không biết nhiều về ảnh, ta có thể cố gắng để mô phỏng và mô tả đặc điểm
các nguồn suy giảm (mờ và nhiễu) và thực hiện quá trình loại bỏ và giảm bớt ảnh
hưởng của chúng. Đây là cách tiếp cận ước đoán, vì ta thử ước đoán ảnh như thế nào
trước khi bị suy giảm thông qua xử lý các đặc tính liên quan còn lại.
Nói cách khác, rất nhiều nhận thức trước đây về ảnh đã có sẵn, có thể thành công
hơn để phát triển mô hình toán học của ảnh ban đầu và điều chỉnh mô hình ảnh quan
sát. Một ví dụ cho trường hợp này, giả sử rằng ảnh đã biết chỉ chứa các đối tượng
hình tròn có kích thước cố định (các vì sao, các hạt, các tế bào,…). Ở đây, công việc
là sự phát hiện, vì chỉ một vài thông số của ảnh ban đầu là chưa biết (số lượng, vị trí,
biên độ,…).
Việc tiếp cận bài toán khôi phục ảnh cũng thể hiện ở một vài lựa chọn khác. Thứ
nhất, việc phát triển có thể sử dụng các phép toán rời rạc hay liên tục. Thứ hai, việc
phát triển có thể thực hiện trong miền không gian hay miền tần số. Cuối cùng, trong
khi việc thực hiện phải là số (digitally) thì khôi phục có thể thực hiện trong miền
không gian (qua tích chập) hay miền tần số (qua phép nhân).
Thật may mắn, bây giờ ta đã xác định đượ tập điều kiện mà, nếu được bảo toàn,
làm cho các phương pháp tiếp cận khác nhau đều cần thiết ngang nhau. Vì thế, chúng