MMA7455L
ACCELEROMETER
01.2010_REV_01
Page 1
3.1.1 Cảm biến accelerometer MMA7455L:
Giới thiệu:
MMA7455 là cảm biến đo gia tốc 3 trục X, Y, Z, là sản phẩm của hãng Freescale, ngõ ra
Digital, công suất thấp, có những đặc trưng cơ bản sau:
;Ngõ ra Digital (I2C/SPI) – 10;bit ở Mode 8g (g là gia tốc trọng trường)
;Kích thước: 3mm x 5mm x 1mm, đóng gói 14 chân LGA
;Dòng tiêu thụ thấp 400µA
;Chức năng Self Test trục Z
;Điện áp vận hành thấp 2.4V – 3.6V
;Sử dụng các thanh ghi User Assigned để chỉnh Offset
;Lập trình giá trị ngưỡng cho phép ngắt
;Phát hiện chuyển động: Shock, dao động, rơi.
;Phát hiện xung: xung đơn và xung kép
;Độ nhạy: 64 LSB/g @ 2g và @ 8g ở 10;Bit Mode
;Có thể chọn tầm đo (±2g, ±4g, ±8g)
;Chịu shock tới 10000g
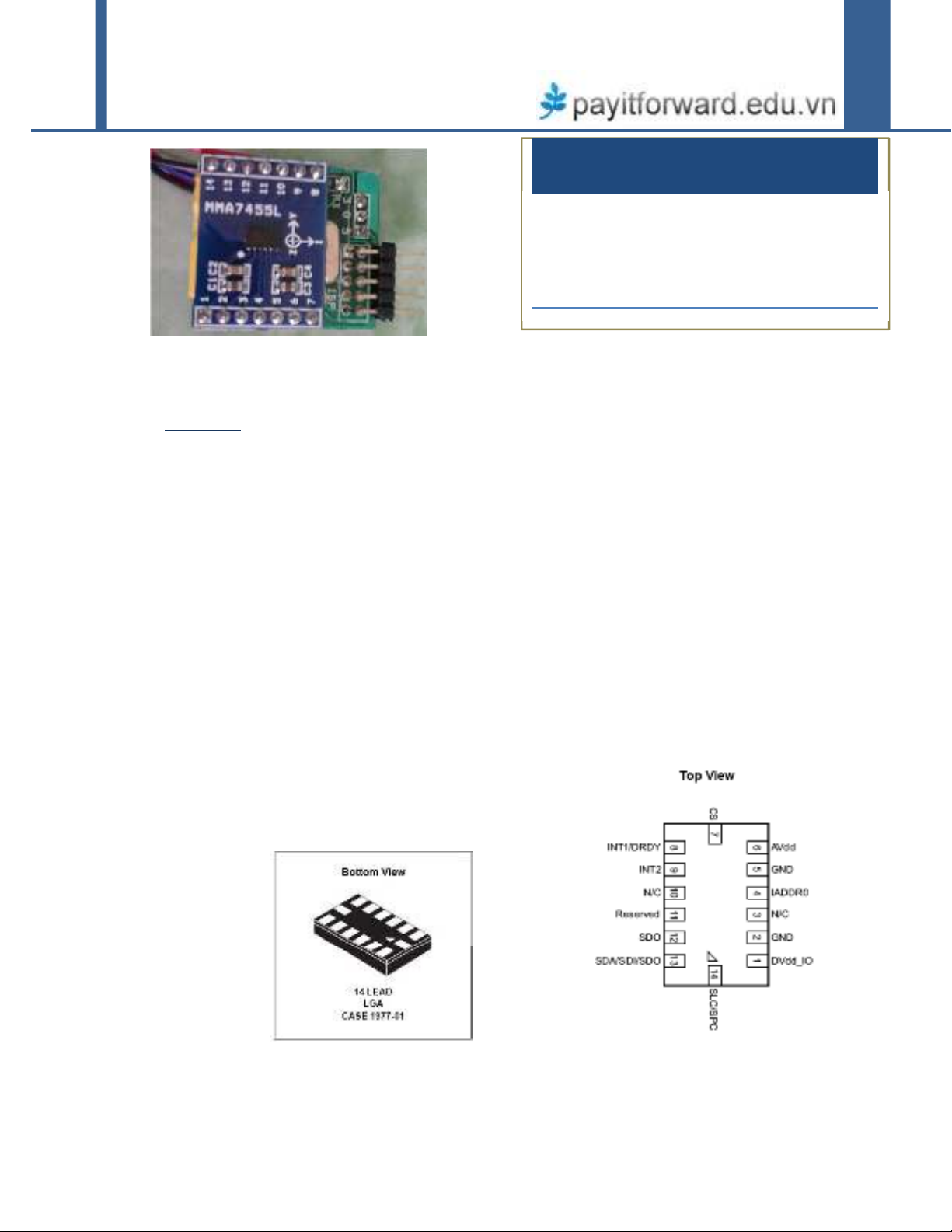
Hình 3.1.1: Hình dạng MMA7455
3.1 Cảm biến
accelerometer
MMA7455L
ACCELEROMETER
01.2010_REV_01
Page 2
Ứng dụng phổ biến:
;Cell Phone/PMP/PDA: Image Stability, Text Scroll, Motion Dialing, E;Compass, Tap
to Mute
;HDD: phát hiện trạng thái rơi tự do (Freefall Detection)
;Laptop PC: phát hiện rơi hay bị lấy cắp (Freefall Detection, Anti Theft)
;Bổ chính độ nghiêng cho la bàn điện tử (E Compass Tilt Compensation)
;3D Gaming: Cảm biến đo độ nghiêng và chuyển động (Tilt and Motion Sensing), Ghi sự
kiện (Event Recorder)
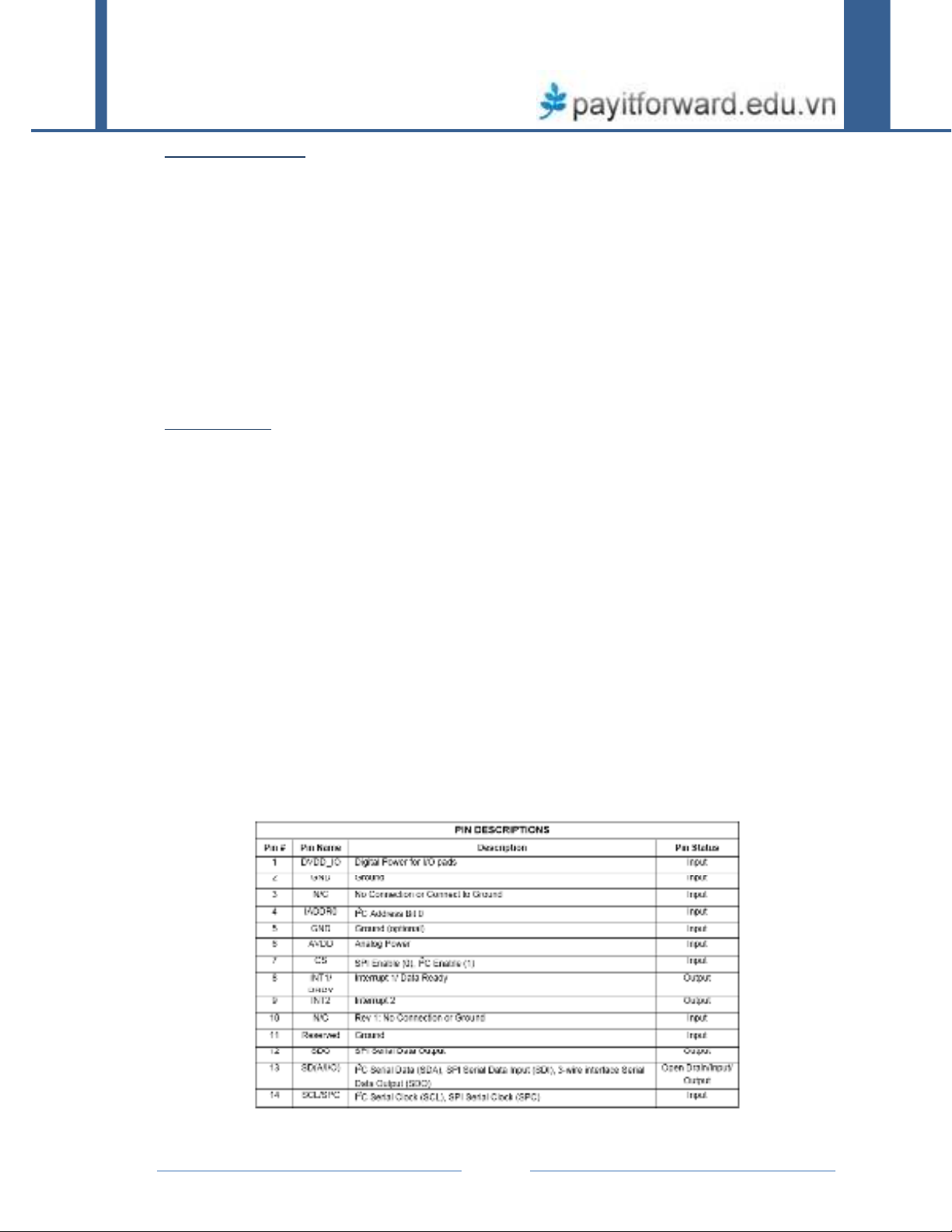
Mô tả các chân:
#1: DVdd_IO, cấp nguồn digital cho các chân I/O.
#2: GND, nối ground.
#3: NC, không dùng, để hở hoặc nối đất.
#4:IADDR0, Bit 0 của địa chỉ I2C.
#5: GND, nối đất.
#6: AVdd, nguồn Analog.
#7: CS, Chip Select, chọn kiểu truyền thông: mức 0 cho SPI, mức 1 cho I2C.
#8: INT1/DRDY, ngắt 1 và báo Data Ready.
#9: INT2, Ngắt 2.
#10: NC, không dùng, để hở hoặc nối đất.
#11: Reserved, dự trữ, nối đất.
#12: SDO, dữ liệu ra trong truyền thông nối tiếp kiểu SPI.
#13: SDA/SDI/SDO, dữ liệu truyền thông nối tiếp kiểu I2C (SDA) / dữ liệu vào của truyền
thông SPI (SDI) / dữ liệu ra của truyền thông nối tiếp kiểu 3;wire.
#14: SCL/SPC, xung clock của truyền thông nối tiếp I2C (SCL) hay SPI (SPC).
Bảng 3.1.1: Mô tả chức năng các chân MMA7455
MMA7455L
ACCELEROMETER
01.2010_REV_01
Page 3
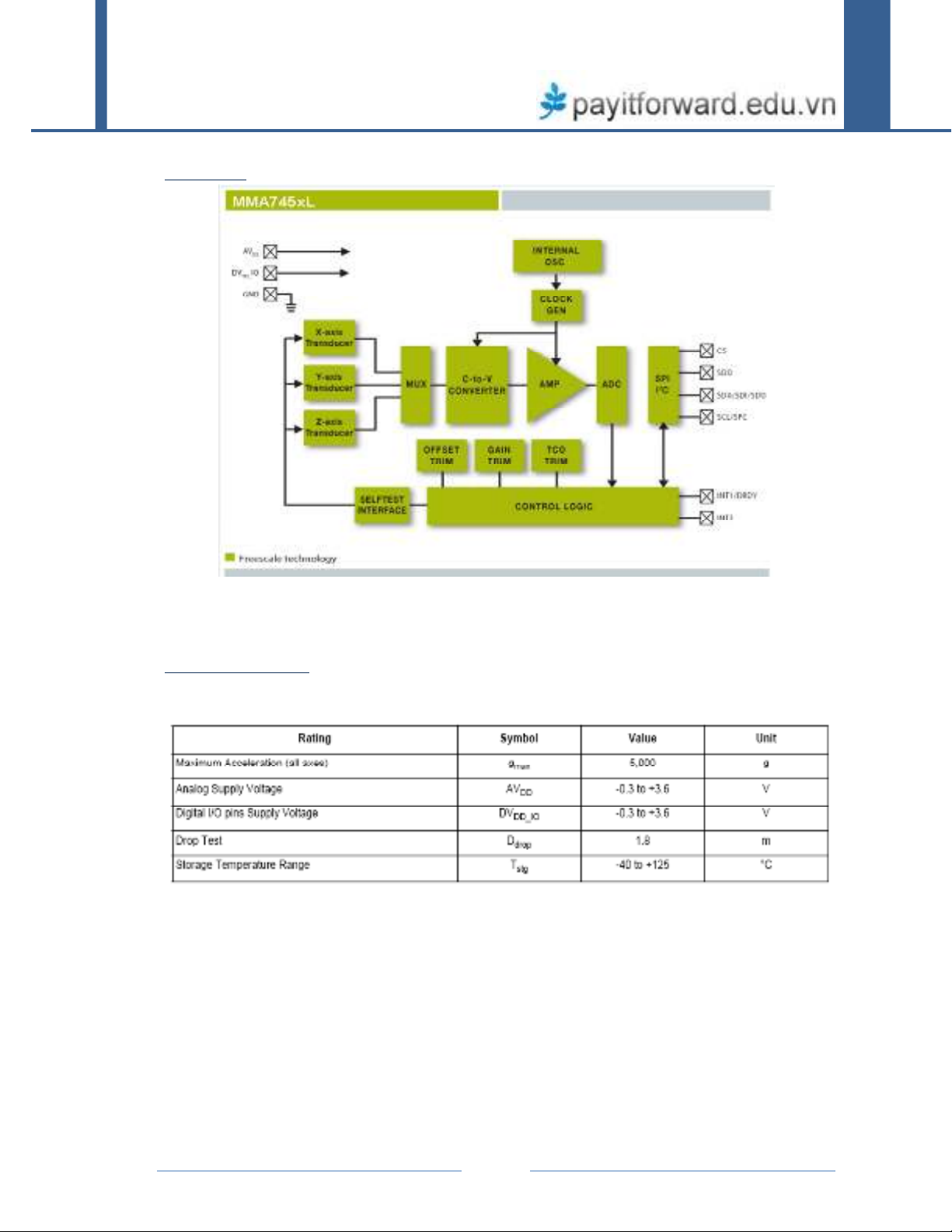
Sơ đồ khối:
Hình 3.1.2: Sơ đồ khối dạng đơn giản của accelerometer
Thông số hoạt động:
Bảng 3.1.2: Các giá trị tối đa cho phép
;Nguồn Analog: AV
DD
2.4 V ; 3.6 V (tiêu chuẩn 2.8V)
;Nguồn digital: DV
DD_IO
1.71 V – AV
DD
(tiêu chuẩn 1.8 V)
;Dòng tiêu thụ: I
DD
khoảng 400μA, tối đa 490μA. Ở chế độ Stand by I
DD
khoảng 10μA.
;Tầm đo gia tốc trên cả 3 trục X, Y, Z: có 3 mode 2, 4, 8
;Nhiệt độ làm việc: ;40 – 80 °C
;Điện áp ngõ vào mức cao: 0.7 x V
DD
, mức thấp: 0.35 x V
DD
MMA7455L
ACCELEROMETER
01.2010_REV_01
Page 4
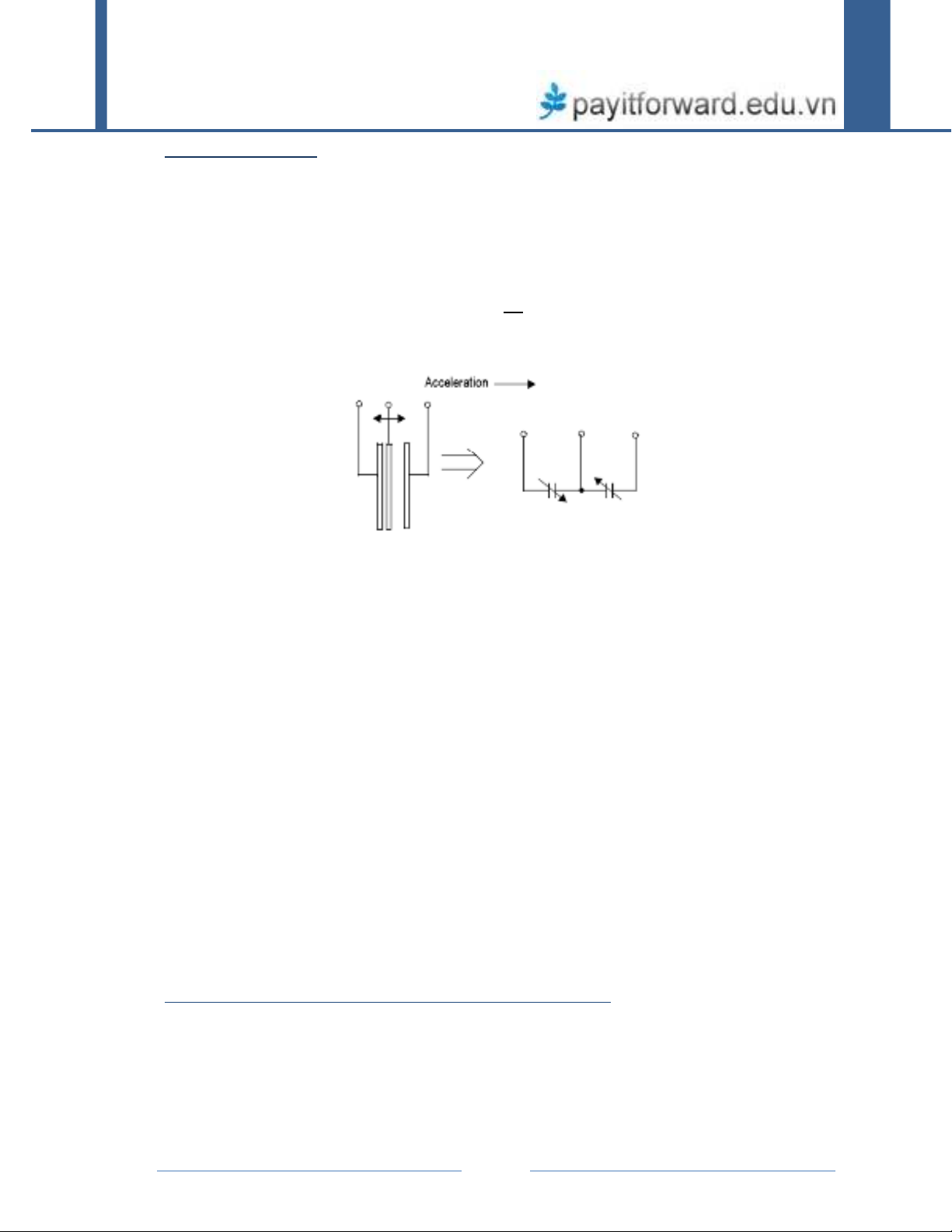
Nguyên lý hoạt động:
MMA7455 là một cảm biến vi cơ bề mặt (surface micromachined integrated circuit
accelerometer) thuộc loại điện dung.
Dưới tác dụng của gia tốc, khoảng cách giữa các vách ngăn thay đổi, sự thay đổi này dẫn
đến sự thay đổi giá trị điện dung theo công thức quen thuộc:
Với A là diện tích các miếng ngăn, là hằng số điện môi, D là khoảng cách giữa các tấm.
Giá trị điện áp ngõ ra tỉ lệ với gia tốc đo được.
Từ giá trị gia tốc, ta có thể tích phân đơn để có giá trị vận tốc hay tích phân 2 lớp để xác định
vị trí của vật thể.
Gia tốc tĩnh do lực hấp dẫn có thể được dùng để xác định góc và độ nghiêng.
3.1.2 Phương pháp calibrate cho cảm biến accelerometer:
Điểm offset của accelerometer bị trôi do ảnh hưởng của nhiệt độ, sự lão hoá và các biến
động trong môi trường làm việc. Sự trôi offset này ảnh hưởng lớn đến các ứng dụng, cụ thể
nhất là trong xác định góc nghiêng (tilt), sai số do sai offset có thể lên tới 12º khi được đọc
trên mặt phẳng nhẵn – điều này là không thể chấp nhận được.
Do đó ta luôn phải tiến hành calibrate cho accelerometer trước khi đưa vào sử dụng, tức là
tìm các giá trị hiệu chỉnh để tính toán được giá trị đo chính xác.
Các giá trị cần xác định đó là giá trị 0g – zero g, và độ nhạy sensitivity thực tế.
Các phương pháp xác định giá trị zero g được đề nghị như sau:
1. Manual 0g X, Y, Z Full Range Calibration: Quay accelerometer từ vị trí +1g tới ;1g, ghi
nhận giá trị nhỏ nhất và lớn nhất. Do tính đối xứng, điểm “0g” sẽ nằm ở chính giữa khoảng
này.
Tiến hành với cả 3 trục X,Y,Z để có giá trị offset cho mỗi trục.
MMA7455L
ACCELEROMETER
01.2010_REV_01
Page 5
2. Simple 0g X, Y, Z calibration: Cho rằng khi accelero nằm trên mặt phẳng, ta có giá trị
trên trục X, Y tại đó là 0g, quay accelerometer 90º tới vị trí 0g của trục Z (trục Z nằm song
song với mặt phẳng), ghi nhận giá trị zero của trục Z.
Phương pháp này đơn giản nhưng không có độ chính xác cao như phương pháp 1.
3. Freefall Calibration: Cho cảm biến rơi tự do. Thuận lợi của phương pháp này là ta có
thể đọc được giá trị 0g của 3 trục cùng một lúc. Tuy nhiên khi cần calibrate lại, không phải
lúc nào cũng dễ dàng để cho thiết bị “rơi tự do” được.
4. Simple 0g X, 0g Y, +1g Z calibration: Đặt cảm biến trên một mặt phẳng nhẵn, đọc giá trị
0g của các trục X, Y tại đây và +1g của trục Z. Giá trị +1g Z trừ đi độ nhạy biết trước, ta được
0g Z. Với phương pháp này có thể giá trị 0g X, Y là khá chính xác (với mặt gần như phẳng
hoàn toàn), nhưng giá trị 0g Z thì không được đảm bảo vì nó không được đọc tại đúng vị trí
0g. Thuận lợi của phương pháp này là không cần phải dịch chuyển hay xoay thiết bị, phù hợp
với trường hợp calib lại sau một thời gian hoạt động mà accelerometer đã được gắn “cứng”
trên thiết bị.
Ngoài ra, với các dụng cụ, thiết bị thí nghiệm chính xác như máy tạo xung, dao động kí, …
ta có các phương pháp calibrate hiệu quả hơn.
Đọc giá trị sau khi được calibrate:
Xác định khoảng dời offset CZ
OFF
của mỗi trục
Đọc giá trị đo được CA
Gia tốc thực:
Với S là độ nhạy.
Nếu sử dụng phương pháp Simple 0g X, 0g Y, +1g Z calibration thì gia tốc thực được tính
như sau:







![Giáo trình Kỹ thuật cảm biến (Nghề Điện tử công nghiệp) - CĐ Công nghiệp & Thương mại [PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210601/ermintrudetran/135x160/8391622516138.jpg)
![Giáo trình Kỹ thuật cảm biến Cơ điện tử CĐ Công nghiệp Hải Phòng [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210521/agatha25/135x160/7811621607840.jpg)















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)