Ch ngươ 1
Bài 1-1
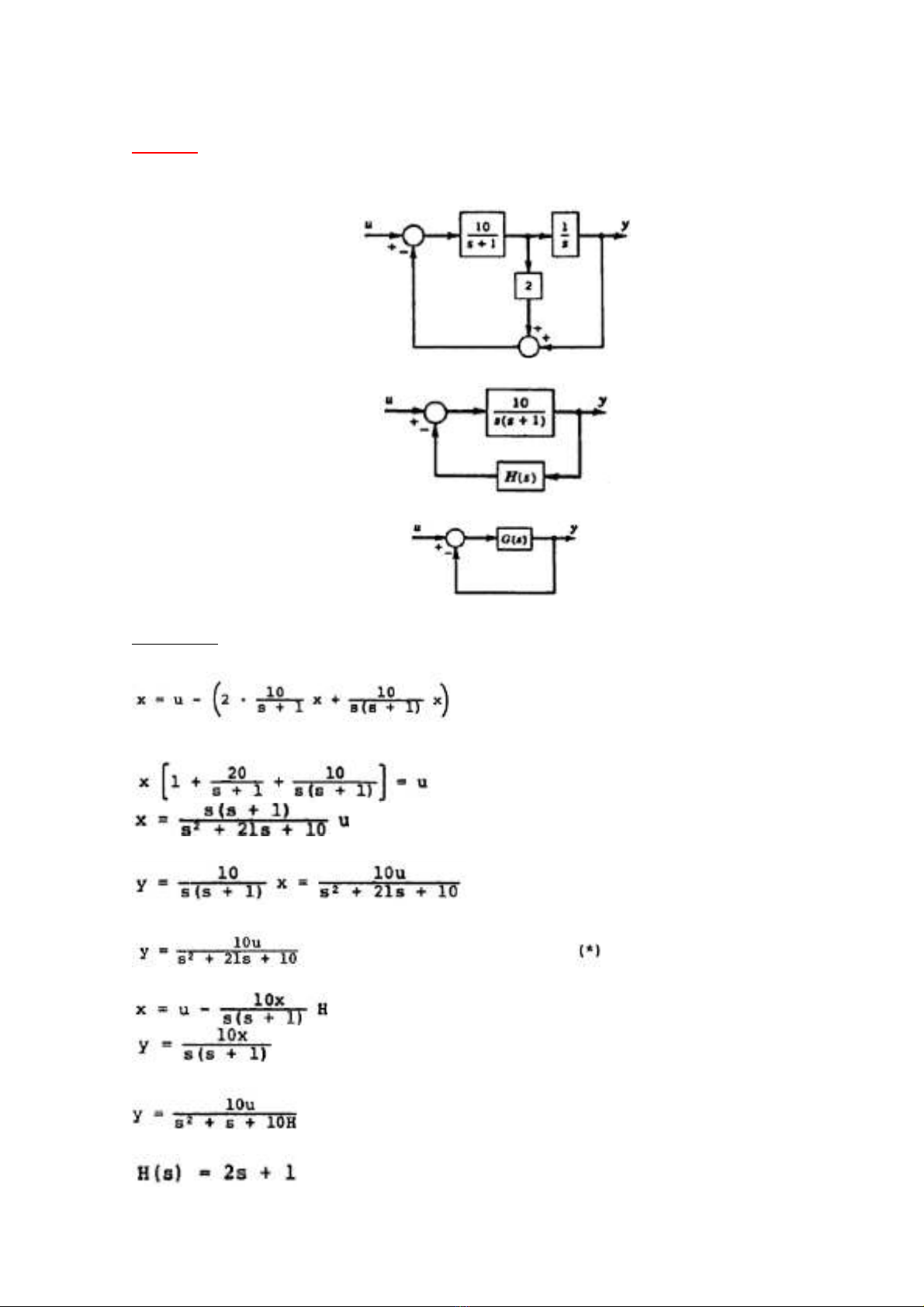
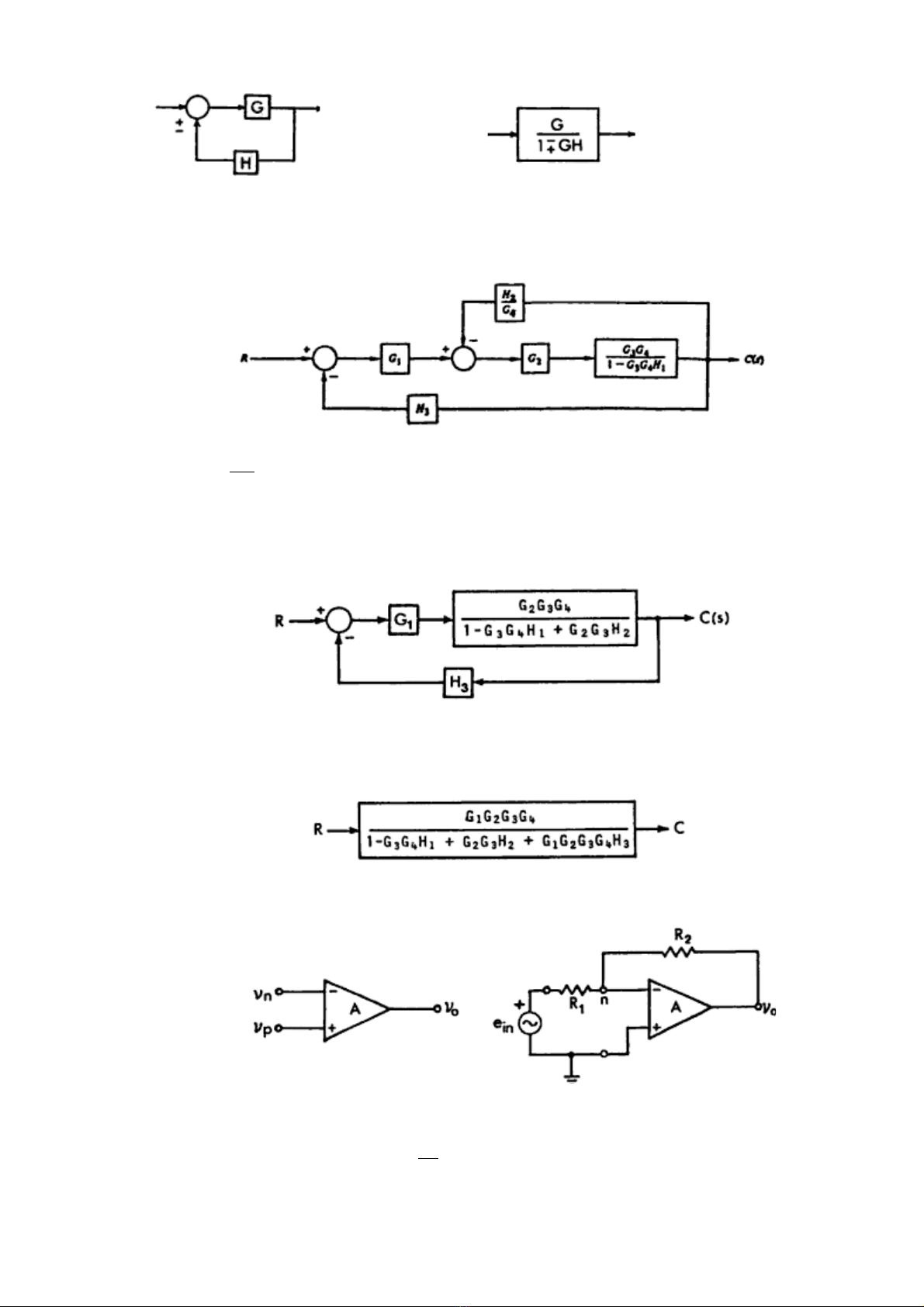
Cho sơ đồ kh iố c aủ hệ th ngố như hình 1. Sơ đồ kh iố c aủ hệ th ngố đ cượ
chuy nể đ iổ như hình 2 và hình 3
Hình 1
Hình 2
Hình 3
L iờ gi i:ả
Th cự hi nệ c ngộ t iạ đi mể x c aủ hình 1, tai đây ta có:
Hay
Từ sơ đồ kh iố và ph ngươ trình trên ta có:
V iớ sơ đồ hệ th ngố ở hình 2 và 3 chúng ta ph iả tìm m iố quan hệ gi aữ y và u
Hình 2 ta c ngộ t iạ đi mể x:
K tế h pợ 2 ph ngươ trình ta có:
So sánh v iớ (*) ta có:
Trong hình 3:
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Đ ngồ nh tấ v iớ ph ngươ trình (*):
V y:ậ
Bài 1-2:
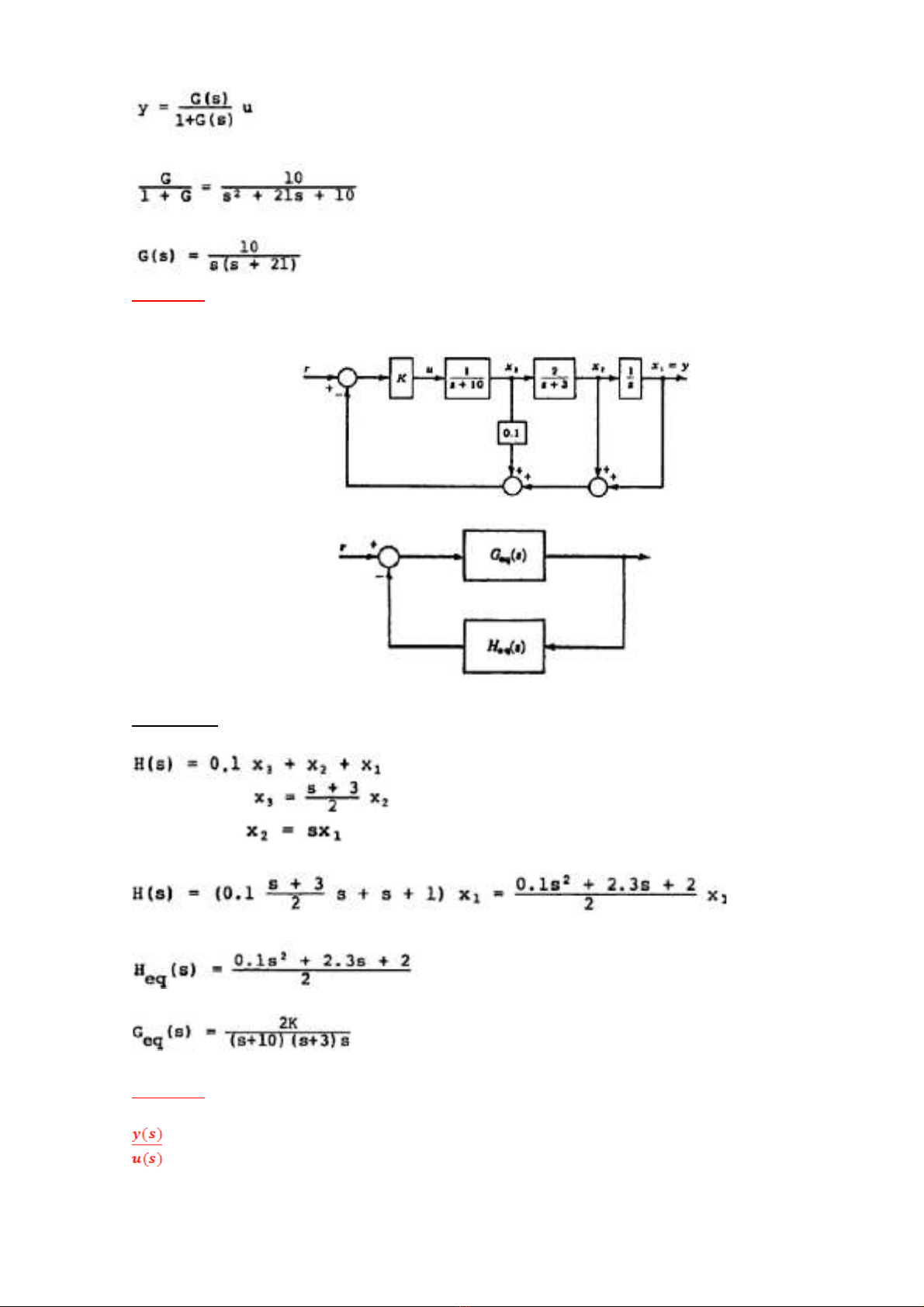
Cho hệ th ngố đi uề khi nể vòng kín như hình 1. Tìm Geq(s) và Heq(s) c aủ hệ
th ngố cho b iở hình 2.
Hình 1
Hình 2
L iờ gi i:ả
Từ sơ đồ kh iố ở hình 1 ta có đ cượ khâu ph nả h iồ c aủ hệ th ng:ố
Và
Thay vào khâu ph nả h i:ồ
V iớ y = x1, ta có đ cượ hàm truy nề c aủ khâu ph nả h i:ồ
Từ sơ đồ kh iố hình 1 ta có:
Bài 1-5:
Cho hệ th ngố đ cượ trình bày hình d i.ướ Hãy tìm m iố quan hệ gi aữ u và y (
) là 1 hàm theo H1, H2, G1, G2 và G3.
CuuDuongThanCong.com https://fb.com/tailieudientucntt
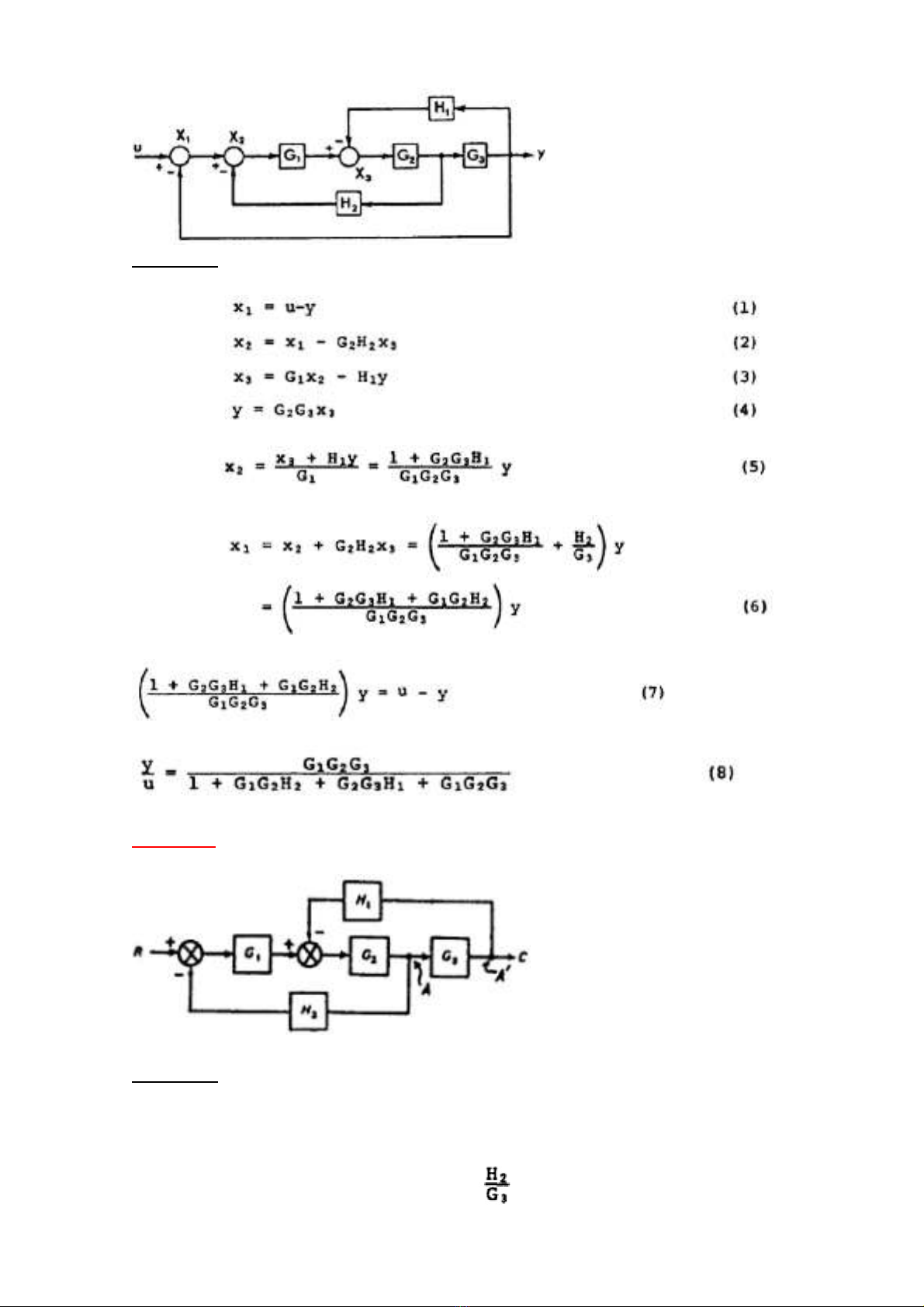
L iờ gi i:ả
Từ sơ đồ kh iố trên ta có đ cượ ph ngươ trình:
Từ ph ngươ trình (3) và (4) thay vào x2:
L yấ ph ngươ trình (5) thế vào ph ngươ trình (2):
Thế ph ngươ trình (6) vào ph ngươ trình (1):
Như v y:ậ
Bài 1- 6:
Cho sơ đồ kh iố c aủ hệ th ngố như sau:
Hãy tìm hàm truy nề c aủ hệ th ngố và t iố gi nả sơ đồ kh iố.
L iờ gi i:ả
Hệ th ngố có 2 khâu ph nả h i.ồ Ta s pắ x pế l iạ sao cho chỉ còn 1 khâu ph nả h i.ồ
Chuy nể đi mể A c aủ khâu ph nả h iồ phía d iướ t iớ đi mể A’ thì ph iả bi nế đ iổ H2
thành
CuuDuongThanCong.com https://fb.com/tailieudientucntt
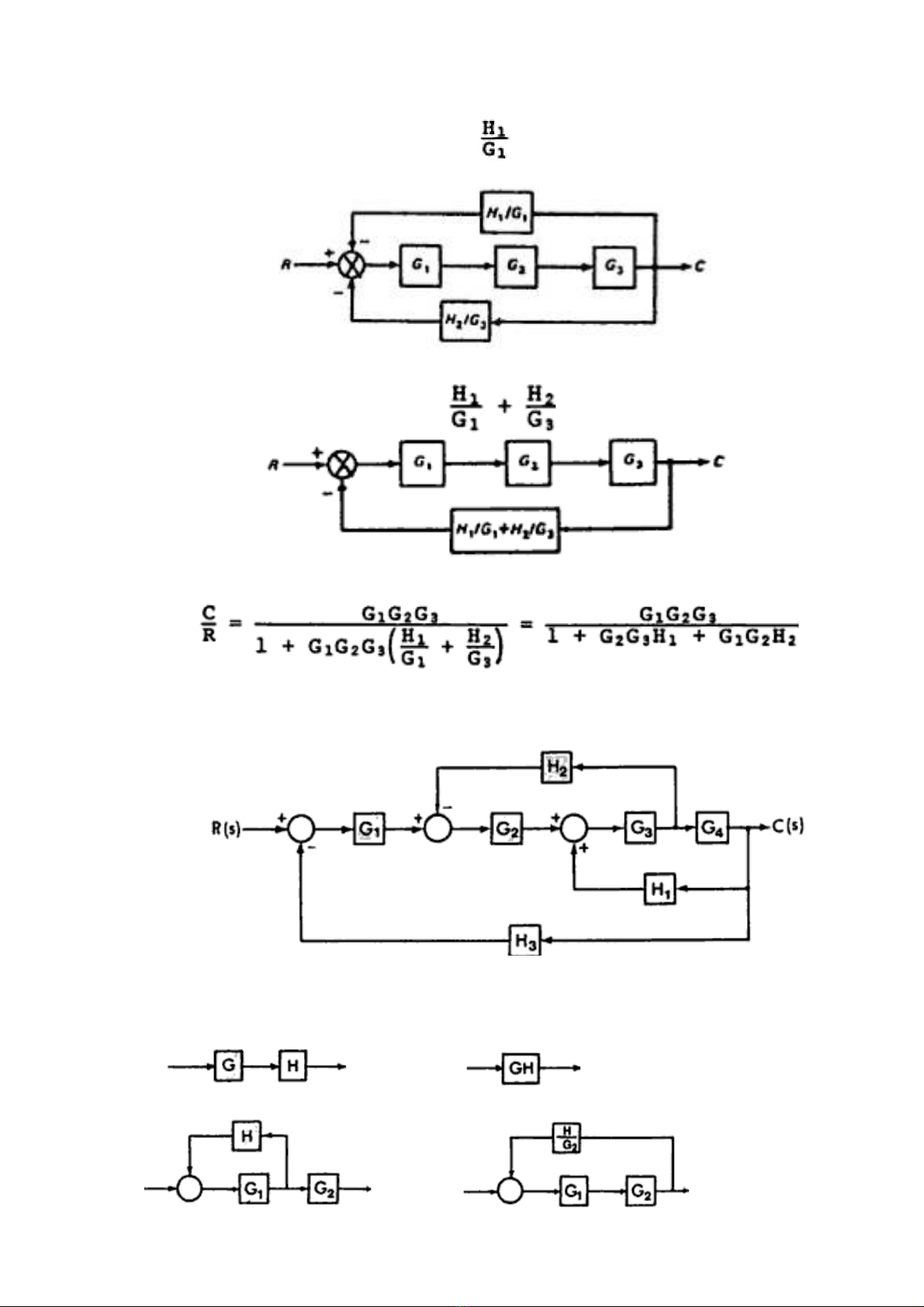
Chuy nể đi mể B ở phía trên t iớ đi mể B’ thì H1 đ cượ bi nế đ iổ thành:
Sơ đồ kh iố đ cượ chuy nể đ iổ t ngươ đ ngươ thành:
2 khâu ph nả h iồ đ cượ chuy nể thành 1 khâu , v iớ :
Từ sơ đồ kh iố v aừ có, ta có đ cượ hàm truy nề đ cượ đ nơ gi nả hóa như sau:
Bài 1-7: Thu g nọ sơ đồ c aủ hệ th ngố đi uề khi nể vòng kín nhi uề vòng hình
d iướ thành sơ đồ đ nơ gi n:ả
Gi i:ả
Để có thể thu g nọ sơ đồ trên c nầ ph iả dùng nh ngữ quy t cắ sau:
+ thành
+ thành
CuuDuongThanCong.com https://fb.com/tailieudientucntt
+ thành
Sử d ngụ quy t cắ 2 sẽ chuy nể đ cượ kh iố H2 ra sau kh iố G4. Sử d ngụ quy t cắ 3
sẽ khử đ cượ vòng G3.G4. G1. Đ aư ra đ cượ sơ đồ t ngươ đ ngươ như hình d i.ướ
Khử vòng
2
4
H
G
sẽ đ c:ượ
Cu iố cùng, thu g nọ l iạ theo nguyên t cắ 1 khử vòng H3 đ cượ sơ đồ thu g nọ như
hình d i:ướ
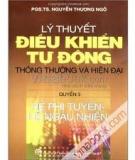
Bài 1- 8: Mô hình m chạ khu chế đ iạ đ cượ đ aư ra như hình d i:ướ
-Cho
4
10A>
-Tính hệ số khu chế đ iạ
0
in
V
e
CuuDuongThanCong.com https://fb.com/tailieudientucntt
![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)

![Bài tập môn Điều khiển nâng cao [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140213/letankiep1991/135x160/7671392284043.jpg)


![Bài tập lý thuyết điều khiển hiện đại [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130417/le_xuan_trung/135x160/1419631_1510.jpg)



















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)