Tự động hoá - Điều khiển là lĩnh vực đang thay đổi mạnh mẽ diện mạo của nền công nghiệp hiện đại. Từ dây chuyền sản xuất thông minh, hệ thống robot công nghiệp đến nhà máy số, vai trò của kỹ thuật điều khiển và công nghệ tự động hóa ngày càng trở nên thiết yếu. Trong bối cảnh đó, việc tiếp cận đúng nguồn tài liệu chuyên ngành là yếu tố nền tảng để phát triển năng lực chuyên môn vững vàng và kịp thời cập nhật xu hướng công nghệ mới.
Tổng quan về Tự động hóa - điều khiển
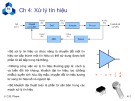
Tự động hóa – Điều khiển là ngành tích hợp các lĩnh vực như điện – điện tử, cơ khí, lập trình và hệ thống điều khiển nhằm thiết kế, vận hành và giám sát các quy trình tự động. Về vai trò, đây là lĩnh vực cốt lõi trong quá trình chuyển đổi công nghiệp, từ sản xuất truyền thống sang sản xuất thông minh. Hệ thống điều khiển chính xác giúp tối ưu hóa năng suất, giảm thiểu lỗi vận hành, tiết kiệm nhân lực, đồng thời đảm bảo độ an toàn và ổn định của toàn bộ hệ thống.
Tài liệu học tập và nghiên cứu chuyên ngành
- Giáo trình nền tảng: Tài liệu giảng dạy chính quy tại trường đại học, cao đẳng, trung cấp.
- Sổ tay kỹ thuật, hướng dẫn thực hành: Tài liệu súc tích, phục vụ thao tác kỹ thuật, vận hành thực tế, mẹo nghề.
- Tài liệu tiêu chuẩn, quy chuẩn chuyên ngành: Tài liệu tham khảo về quy trình, tiêu chuẩn ISO, TCVN, IEC, GMP…
- Bài tập, đồ án, ví dụ ứng dụng: Phục vụ cho học tập, làm khóa luận, rèn luyện kỹ năng áp dụng thực tế.
- Bài báo, công trình nghiên cứu, hội thảo chuyên đề: Nguồn tri thức nâng cao dành cho sinh viên năm cuối, học viên cao học, nhà nghiên cứu.
- Tài liệu phần mềm, mô phỏng, thiết kế chuyên ngành: Hướng dẫn sử dụng các phần mềm kỹ thuật chuyên sâu.
Giá trị học thuật và thực tiễn
Danh mục tài liệu không chỉ đơn thuần phục vụ nhu cầu học tập hay tra cứu mà còn đóng vai trò quan trọng trong việc hình thành tư duy hệ thống, nâng cao kiến thức nền tảng và phát triển năng lực ứng dụng thực tiễn của người học. Với tính đa dạng về loại hình và chiều sâu nội dung, các tài liệu trong danh mục giúp người đọc tiếp cận được những lý thuyết cốt lõi, cập nhật kiến thức chuyên môn theo chương trình đào tạo chuẩn, đồng thời tạo điều kiện để hiểu rõ mối liên hệ giữa lý thuyết và thực hành. Thông qua các giáo trình nền tảng, bài tập ứng dụng, tài liệu kỹ thuật, tiêu chuẩn chuyên ngành và công trình nghiên cứu, người học có thể rèn luyện khả năng tư duy phản biện, xử lý vấn đề chuyên sâu, từ đó tự tin hơn khi bước vào môi trường làm việc chuyên nghiệp. Đồng thời, các tài liệu cũng cung cấp nhiều ví dụ thực tế, mô hình ứng dụng, và dữ liệu tham khảo có giá trị, giúp người sử dụng định hướng được nhu cầu học tập hoặc nghiên cứu của bản thân theo từng cấp độ.
Tài liệu hướng đến đối tượng nào?
- Sinh viên các ngành: Cơ điện tử, Tự động hóa, Điều khiển – Kỹ thuật điện
- Kỹ sư và chuyên viên đang làm việc tại nhà máy sản xuất, công ty công nghiệp
- Giảng viên, nhà nghiên cứu trong lĩnh vực điều khiển và tự động hóa
- Người học muốn thi chứng chỉ nghề quốc tế như Siemens, Allen-Bradley, ABB…







![Câu hỏi ôn tập IoT cơ bản [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250702/kimphuong555/135x160/85331751442800.jpg)
![Tài liệu giảng dạy Công nghệ IoT Trường CĐ Kinh tế - Kỹ thuật Vinatex TP. HCM [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2022/20221108/runthenight01/135x160/7161667958266.jpg)

![Đề cương chi tiết học phần Phát triển ứng dụng IoT [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210417/lovebychance01/135x160/3601618651859.jpg)



![Bài giảng Tự động hoá thiết bị điện [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260312/hoabattu2026/135x160/61691773631881.jpg)




![Giáo trình Thực hành SCADA Trường Đại học Bà Rịa - Vũng Tàu [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260310/hoaphuong0906/135x160/94061773283866.jpg)





![Giáo trình Điều khiển số Phần 2: [Thêm từ khóa mô tả nội dung chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260302/camtucau2026/135x160/37201772766913.jpg)








![Giáo trình Kỹ thuật Vi điều khiển Phần 2: [Mô tả nội dung phần 2 nếu có]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260424/vispacex_27/135x160/62641777433528.jpg)
![Giáo trình Kỹ thuật Vi điều khiển Phần 1: [Mô tả chi tiết hơn về nội dung phần 1 nếu có thông tin]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260424/vispacex_27/135x160/15221777433529.jpg)
























![Bài giảng Kỹ thuật đo [năm] chuẩn nhất](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250515/hoatrongguong02/135x160/941747305019.jpg)
















![Giáo trình Lắp đặt thiết bị tự động hóa 1 (Nghề Sửa chữa thiết bị tự động hóa - Trung cấp) - Trường Cao Đẳng Dầu Khí [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2022/20221215/trangtim0906/135x160/7771671098553.jpg)








![Bài giảng Thiết kế điều khiển 2 [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250516/phongtrongkim0906/135x160/5221747448741.jpg)




![Giáo trình Điều khiển khí nén thuỷ lực Phần 2: [Mô tả/Chủ đề cụ thể của phần 2]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260302/camtucau2026/135x160/11911772768225.jpg)
![Giáo trình Điều khiển khí nén thuỷ lực Phần 1: [Mô tả/Định tính thêm nếu cần]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260302/camtucau2026/135x160/51511772768225.jpg)








![Tài liệu học tập Thiết kế hệ thống nhúng [mới nhất, đầy đủ]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/37051773135929.jpg)











%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)