Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
i Thi u Chung V H Th ng Tr m G c (Nguy n Văn Hu n)
ạ
ấ
ễ
ố
ố
ề ệ
ệ i Thi u Chung V GSM
ề
ớ ệ
H th ng GSM đ
ạ ự ề ả ượ ệ ố ả ể ư ộ ủ ồ ụ ụ ỗ ệ ố ệ ủ ợ ộ ộ ề ễ ứ ề ể ộ ư ộ ề ể ể ạ ấ ộ ệ ụ ừ ạ ộ ố ộ ề ạ ể ạ ế m ng cũng có m t s các c s d ộ ọ ế ị ụ ở ạ ạ ộ ố ể ố ạ ể ộ
Ph n I : Gi ầ 1, Gi ớ ệ ố c chia thành h th ng chuy n m ch (SS hay NSS) vμ h th ng ệ ố ạ ế ạ c th c hi n nh m t m ng g m nhi u ô vô tuy n c nh tr m g c (BSS). H th ng đ ố ạ ượ ộ ạ nhau đ cùng đ m b o toàn b vùng ph sóng c a vùng ph c v . M i ô có m t tr m ể ộ vô tuy n g c (BTS) làm vi c m t t p h p các kênh vô tuy n. Các kênh này khác v i các ệ ở ộ ậ ớ ế ế ố ể ạ các ô lân c n đ tránh nhi u giao thoa. M t b đi u rkhi n t m c s d ng kênh đ ể ậ ượ ử ụ ở g c (BSC) đi u khi n m t nhóm BTS.BSC đi u khi n các ch c năng nh chuy n giao ể ể ề ố và đi u khi n công su t. M t trung tâm chuy n m ch các nghi p v di đ ng (MSC) ạ m ng chuy n m ch đi u khi n m t s BSC.MSC đi u khi n các cu c g i đ n và t ể ề đi n tho i công c ng (PSTN), m ng s liên k t đa d ch v (ISDN), m ng di đ ng m t ặ ộ ệ đ t công c ng (PDN) và có th là các m ng riêng. ơ ở ữ ấ li u đ theo dõi nh ệ
ư ể ụ ị ị ộ ứ ị ườ ề ị B đăng ký đ nh v th ố ậ c n i đ n HLR. Ch c năng c a AUC là cung c p cho ậ ấ ủ ố ế ả ậ ự ủ ứ ể ử ụ t c các MS ị ộ ệ ng trú (HLR) ch a các thông tin v thuê bao nhiêu các d ch v ề b sung, các thông s nh n th c và thông tin v v trí c a MS. ự ổ Trung tâm nh n th c (AUC ) đ ượ HLR các thông s nh n th c vμ các khoá m t mã đ s d ng cho b o m t. ậ B ghi đ nh v t m trú (VLR) : là m t c s d li u ch a thông tin v t ề ấ ả ộ ơ ở ữ ệ ỗ ứ hi n đang ph c v c a vùng MSC. M i MSC có m t VLR. ế ự ố ậ ị ạ ụ ụ ủ Thanh ghi nh n d ng thi ạ ậ ộ ớ ợ ố ị ệ ế c a thi t c các thi t b t b . ị ế h ị ở ệ ể ạ
ủ ẩ ạ t b giao ti p và vô tuy n c n thi t c các thi ạ t ế ở ộ ạ ấ ả ế ế ầ t b (EIR) đ c n i v i MSC qua m t ộ đ ng báo hi u. Nó cho phép MSC ki m tra s h p l ờ ể ự ợ ệ ủ H th ng khai thác và h tr (OSS) đ c n i đ n t ỗ ợ ệ ố ượ ố ế ấ ả th ng chuy n m ch và n i đ n BSC ố ế ố 2. Các Đ nh Nghĩa ị Tr m g c vô tuy n 200 (RBS 200) là tên s n ph m c a Ericsson cho tr m thu phát g c ố ế ả ố GSM (BTS). Nó g m t m t tr m vô ị ồ tuy n dù tr m này ph m t hay nhi u ô. ạ ủ ộ ế H th ng con thu phát (TRS). Ph n vô tuy n c a RBS. khái ni m GSM, nghĩa là thi ệ ế ị t b ế ủ ử ụ ở ệ ố ệ ố ế ề ầ cw s d ng ượ m t ô.
ế ể ệ ố ự ứ ệ ố H th ng con thu phát (BTS) đ t đ duy trì liên l c c n thi ạ ở ộ ầ ạ ồ H th ng tr m g c (BSS _ Base Station System) th c hi n các ch c năng vô tuy n ế ủ c a CME 20 và g m m t BSC và các BTS c a nó. ộ ủ ệ ố H th ng khai thác và h tr là ph n CME 20 giúp ng ỗ ợ ườ ề ầ ệ ụ ứ ọ t b đ u cu i ố ồ ồ ớ i khai thác đi u khi n h ể ả th ng. Nó g m các ng d ng khác nhau c a h TMOS. Trung tâm khai thác và b o ủ ố d ế ị ầ ưỡ 3. H Th ng tr m g c BSS ạ ứ ả ủ ế ố ị ố ể ề ể ng bao g m các máy tính l n và các thi ố ệ BSS ch u trách nhi m ch y u t ệ ớ ề ở ị ể t c các ti m năng vô tuy n c a m ng và s li u v c u hình c a ô. t c các ch c năng vô tuy n h th ng, qu n lý ế ở ệ ấ ả thông tin vô tuy n v i các máy di đ ng. Nó cũng đi u khi n vi c chuy n giao các ộ ế ệ c đi u khi n b i BSC này. BSS ch u trách cu c g i đang ti n hành gi a các ô đ ượ ế nhi m qu n lý t ố ệ ấ ả ộ ọ ệ ề ấ ữ ề ủ ủ ế ạ ả
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
1
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ở ả ử ự ố ề ng mà không c n đi u ợ ủ ẽ ự ố ộ ườ ả CME 20 có kh năng x lý các tình hu ng s c bình th ệ ng.
ấ ườ ể các tr m g c cũng nh ố các tr m di ạ ế ở ư ở ạ
ộ ộ ề ứ ể ạ ạ ố ố ố
ể BSS ầ khi n c a OSS. BSS s th c hi n các hành đ ng phù h p khi x y ra các tình hu ng ố ể không bình th BSS đi u khi n các m c công su t vô tuy n ứ ề đ ng.ộ H th ng tr m g c (BSS) ch a m t b đi u khi n tr m g c (BSC) và các tr m g c vô ạ ệ ố tuy n (RBS). ế T n t ồ ạ Đ nh n đ ầ c m t đi m nút m nh BSC có kh năng đi u khi n t t c các tính năng ể ấ ả ề ạ ả ộ ể ậ ượ ừ i hai lý do đ chia BSS thành hai ph n: ể ạ Đ thành l p tr m vô tuy n g c (nghĩa là thi quan đi m m ng. ể ạ c a BSS t ủ ể t b tr m) đ n gi n nh t, giá thành r ả ế ị ạ ế ố ẻ ấ ơ
ứ ộ ề ộ ề ố ấ ề ứ ữ ậ cho các ng d ng khác nhau. ụ 3.1 B đi u khi n tr m g c BSC ể ố ạ ạ ể ủ ệ ố ộ ọ ạ ể ạ ộ ng (Traffic channel) t ề ể ớ ệ ố ự ế ố ế ể ề ừ ệ ố ể ạ h th ng chuy n m ch i các cell vô tuy n BTS, ngoài ra nó còn th c hi n quá trình chuy n giao cùng v i MSC. ự
ạ BTS đ ể B đi u khi n tr m g c BSC cung c p nh ng ch c năng thông minh đi u khi n m i ho t đ ng c a h th ng tr m g c (BSS). M t BSC có th đi u khi n nhi u BTS. ố Nó phân ph i s k t n i các kênh l u l ư ượ t ớ 3.2 Tr m thu phát g c BTS c thi i tâm c a m i t ủ ố t L p t ế ậ ạ ữ ế ế ượ ế ằ ấ ố ế ố ả ư ả nh kh năng truy n d n, tên c a cell, ề ủ ẫ ị ế ể ổ ố ộ ượ ầ ệ ố ồ ứ MSC ệ ể Th c hi n vi c chuy n đ i lu ng d li u 64kb/s (ti ng nói, d li u) t ữ ệ ồ ng đ i th p t ữ ệ ng ng v i giao di n vô tuy n 16kb/s. ệ ấ ươ ứ ế ớ ừ ế ố ố ộ ươ ồ ự ự ừ ể ổ ồ ữ ệ ng ng v i giao di n vô tuy n16kb/s. ệ ế ấ ươ ứ ự ồ ệ ệ ồ MSC ế ố ộ ươ ớ ệ
bào,nó thông tin đ n các MS thông qua giao ỗ ế di n vô tuy n Um, nghĩa là nó cung c p nh ng k t n i vô tuy n gi a MS và BTS. ữ ệ BTS đ c xác đ nh b ng các thông s mô t băng t n vô tuy n… 3.3 H th ng chuy n mã và chuy n đ i t c đ TRAU : ể TRAU g m hai kh i ch c năng: ố ệ ổ thành lu ng d li u có t c đ t ữ ệ Th c hi n quá trình tách ghép lu ng Th c hi n vi c chuy n đ i lu ng d li u 64kb/s (ti ng nói, d li u) t ệ thành lu ng d li u có t c đ t ữ ệ Th c hi n quá trình tách ghép lu ng Ph n II : H Th ng Tr m G c BSC (Cao Kim Th ng) ữ ệ ng đ i th p t ố ồ ố
ạ
ắ
ự ầ 1, Gi ớ ề
ố i thi u chung v BSC ệ
ạ ộ ị ng theo m ng vô tuy n đ ộ ế ượ ể ạ ạ
ệ ệ ầ V i h th ng đi n tho i di đ ng toàn Châu Âu, ETSI/GSH đã đ nh nghĩa m t ph n ớ ệ ố đ nh h ử ụ c g i là b đi u khi n tr m g c. Lý do s d ng ướ ọ ừ m i này là nhu c u v tính thông minh riêng c a m ng vô tuy n không ng ng ầ ử ớ
ộ ề ủ ầ ề ố ế ạ t ử ị ph n t phát tri n.ể ự ự ế ệ ứ ể ộ ổ ấ ố ệ ớ th h công ngh m i S phát tri n BSC d a trên ph n c ng AXE tiêu chu n ẩ ở ầ c phát tri n riêng cho BSC, b chuy n đ i mã và ượ ộ ơ ứ ể nh t. Ba đ n v ph n c ng đã đ ị ầ ứ kh i thích ng t c đ (TRAU) là m t trong s đó. ố ộ ể ủ ế ạ ể ố Không th phân b m t t ng đài AXE đ n m i đài vô tuy n c a m ng. Tuy nhiên ế ứ t k m ng c a Ericsson. Các yêu c u ch c ế h n ch này hoàn toàn phù h p v i c s thi ạ ố ộ ổ ợ ọ ế ạ ớ ơ ở ủ ế ầ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
2
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ầ c yêu c u này ph i đ t ki m nh t. ấ Ở n i khai t b ế ị ệ ả i thi u các yêu c u l p đ t và b o ố c đ t ả ượ ặ ở ơ các đài vô tuy n thi ế ặ ầ ắ ể
ượ ằ ộ ụ ả ả ả ệ ế c quên r ng m t nhi m v quan tr ng c a BSC là đ m b o kh năng ọ c th c hi n khi BSC đi u ề ố c s m t cân đ i ự ấ ủ ỉ ượ ằ ệ ấ ế ự ượ ề ỉ ể ng khi s thuê bao l n. ớ M t l ng đ ủ ố ữ ứ năng c a m t BSC l n đ n n i lo i thi t b đ ế ị ượ ớ ộ ủ ạ ế ỗ c th c hi n m t cách ti ng đ thác và b o d ệ ự ượ ế ộ ả ưỡ c đ m b o đ n gi n nh t đ gi m t này ph i đ ấ ể ả ả ơ ả ả ả ượ d ng. ưỡ Ngoài ra không đ s d ng các ti m năng vô tuy n cao nh t. Đi u này ch đ ề ử ụ khi n m t ph n chính c a m ng vô tuy n. Ch có th san b ng đ ạ ầ ộ ể i l u l c a t ủ ả ư ượ ộ ợ ể ấ ế ẽ ệ ả ể c ượ ế t cho vi c qu n lý m ng vô tuy n. ng bên t các ộ ệ ố ư ệ ố ệ ấ ố ẽ ệ ố ẽ ị ả ệ
i ích khác n a khi ch n AXE là các ch c năng khai thác và b o d ả ưỡ ọ t c s h tr c n thi phát tri n r t cao. BSC s có t ạ ấ ả ự ỗ ợ ầ Đ khai thác, nó cũng s không đ c l p v i m t h th ng khai thác và b o d ả ưỡ ớ ộ ậ ngoài.T t nhiên h th ng này có giá tr tăng nh ng khi h th ng làm vi c không t ị nghi p v m ng s không b nh h ng. ưở ụ ạ 2 :Ch c năng ứ M c này phác h a ch c năng th c hi n BSC c a Ericsson. ệ ở ủ ự ứ
ả ọ ụ Qu n lý m ng vô tuy n ế ạ ộ ệ ố ạ ế ị ứ ừ ủ ắ ầ i c u hình đ qu n lý l u l ớ ng xuyên ph i t
ố ệ ự ệ ấ ườ ệ ủ ệ ố ch c l ả ổ ứ ạ ấ ố ệ ế ở ể ả ầ ả ả ế ư ượ ọ ả ủ ị ả ạ ộ ả ự ồ ạ ủ ế t b đang ho t đ ng trong khi đó i c a thi ế ng vô tuy n. ả ủ ư ượ c thu ắ ạ i đúng đ n, các th ng kê khác nhau đ ố ủ c t p trung vào hi u qu c a l u l ệ ượ ậ ệ ấ ả ơ ở ượ
ố ở ể ạ ở ề ằ ng h p đ c bi m ng do l u l ừ ự ấ ể các tr Ở ố ợ ệ ở ặ ng đ n các ô khác. ế ư ượ ị ư ị ườ ế ạ
ế ơ ở ả c đ nh h ượ ị ướ ủ ự ề ấ ủ ậ ớ ng theo máy thu phát. Đi u này nghĩa t. L i ích l n nh t c a lý lu n này ộ ự ố ầ c các đ c tr ng d phòng.T n th t c c đ i gây ra b i m t s c ph n ợ ố ấ ự ạ ề ặ ự ổ ở
t y u d n đ n quan h ch - t
ỗ ạ ớ ợ ệ ủ ớ ữ ể ể ệ ố ề ể ầ ằ ộ M ng vô tuy n c a m t h th ng cellular luôn luôn b s c ép c a vi c t c đ các thuê ệ ố ộ ụ ụ ệ ố bao m i tham gia h th ng không ng ng tăng lên. Sau khi b t đ u ph c v , h th ng th ế ng ngày càng tăng.Vì th vi c th c hi n c u trúc s li u có hi u qu có t m quan tr ng s ng còn. Chính vì lý do này Ericsson đã tách riêng qu n lý RBS và qu n lý m ng vô tuy n ạ BSC.V m ng vô tuy n bao hàm các ô và các kênh logic c a chúng. ề ạ M t b ph n c a BSC đ m b o s t n t ộ ộ ậ ph n khác đ ầ Đ đ m b o c s cho vi c c u hình l ể ả BSC. th p ậ ở i s m t cân đ i ng cao đi m ngày càng tr nên quan Vi c ch ng l ạ ự ấ ư ượ ố ệ m t m c đ nào đó có th bù tr s m t cân đ i này b ng cách đi u ch nh các tr ng. ứ ọ Ở ộ ộ ỉ thông s c a ô đ t có th s d ng các c xác đ nh b i BSC. ượ ể ử ụ ố ủ bi n pháp m nh h n nh đ nh tuy n l u l ơ ệ Qu n lý tr m vô tuy n c s ạ Lý lu n xây d ng RBS c a Ericsson đ ậ t b chung cho nhi u máy thu phát càng ít càng t là thi ế ị là có th đ t đ ư ể ạ ượ c ng ch là m t máy thu phát. ộ ỉ ứ Lý lu n này t ấ ế ẫ ậ v y BSC nh n đ ượ ậ ậ di đ ng. Sau đó TRX đ đ u n i vòng ố ầ ư gi a BSC và các t n s cho m i tr m. Nh ế ầ ố c m t t p h p các kênh có th dành cho vi c n i thông v i card máy ộ ậ c giám sát b ng cách ki m tra ph n m m bên trong và ki m tra ượ ng ti ng. ế đ ở ườ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
3
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ệ ẽ ẫ ủ ẳ c phát hi n s d n đ n vi c l p l ệ ặ ạ ấ ợ ế ậ ượ ư i c u hình c a RBS, ch ng h n m t ộ ạ ị ả c đ a vào ho t đ ng.Vì th t p h p các kênh logic không b nh ế ạ ộ M t s c đ ộ ự ố ượ TRX d phòng đ ự ng. h ưở
ể ề Đi u khi n n i thông máy di đ ng ố t l p và gi ộ ầ ế ậ ệ ượ ệ ộ ấ ố ế ầ c th c hi n trên c s thông tin v các đ c tính c a t ng kênh riêng.Thông tin này thu ề ệ ủ ừ tr m vô tuy n g c. ộ i phóng các đ u n i đ n máy di đ ng.Trong quá ả c dành cho các đ u n i.Vi c dành kênh này ố ặ ỗ ở ạ c BSC giám sát. C ng đ tín hi u và ch t l ờ ố ượ ệ ộ ở ế ượ ế ố ườ ượ ế c đo ấ ọ ự ấ máy di đ ng và máy thu phát, sau đó đ ộ ấ ủ ng ấ ượ ậ c phát đ n BSC. M t thu t ộ t nh t c a máy di đ ng và máy thu phát đ ộ ể ố ấ c ch t l ấ ượ ượ ễ ố ố ả ứ ể ầ ị ị ế ế ố t nh t. ng n i thông t ấ ị ế t nh t. ấ ộ ố ế ể ệ ệ ể ị ả ượ ứ ườ ộ ợ c th c hi n ể BSC, không có quy t đ nh nào đ ượ ệ ở ế ị ự ệ ệ ỉ ừ ự ề ộ ố
BSC ch u trách nhi m thi ị trình thi t l p m t c u hình kênh logic đ ế ậ đ ơ ở ự ượ th p t các phép đo các khe th i gian r i ậ ừ Trong quá trình g i, s đ u n i đ ti ng đ toán công su t quy t đ nh các công su t ra t ế ị gi m nhi u trong m ng và đ ạ Ch c năng đ nh v làm vi c trên cùng s li u đo và quy t đ nh có c n chuy n máy di ố ệ ệ đ ng đ n ô khác hay không. N u nó xác đ nh ô nào t ị ộ Ch c năng chuy n giao th c hi n vi c chuy n d ch cu c n i thông đ n kênh khác. ự Tr c tham gia vào chuy n giao. Tuy ng h p ô này thu c BSC khác, MSC ph i đ nhiên nó ch làm vi c theo các l nh t MSC vì không có thông tin th i gian th c v cu c n i. ờ Qu n lý m ng truy n d n ề ẫ ạ ả ậ ế ộ ể ể ằ ả ấ ề ạ ế ể ử ụ ạ ể ở ệ BSC. ặ ự ể ạ ạ ở ộ ẽ ườ t l p các máy thu phát có d phòng mà không c n ầ ế ậ c. Các m ch 64 Kbit/s đang đ c s d ng b i m t máy thu phát ử ụ ượ ướ c chuy n m ch đ n máy thu phát d phòng. ự ể ế ạ ệ ế ệ ạ ặ ạ ố BSC l p c u hình, dành và giám sát các m ch 64 Kbit/s đ n các tr m vô tuy n g c. ạ ạ Nó cũng đi u khi n tr c ti p m t chuy n m ch ệ xa n m trong RBS đ s d ng hi u ạ ở ự ế qu các m ch 64 Kbit/s.Ghép kênh r / xen đ c th c hi n b i chuy n m ch này cho ượ ự ng truy n d n t m t t ng trên đ phép đ t hai RBS ề ẫ ừ ở ộ ầ Chuy n m ch xa cũng cho phép thi truy n d n dành tr ẫ ề có s c , đ ự ố ượ BSC cũng ch u trách nhi m giám sát các m ch đ n MSC và ra l nh ch n các m ch b s c . ị ự ố ị 3 :C u trúc BSC ấ
ệ ố
Mô hình h th ng
AXE
M c H Thôngs 1 ệ ứ
APT
APZ
Múc h th ng ệ ố 2
M c H Th ng Con ứ ố ệ
ố ( ph nầ M c Kh i Ch c Năng ứ ế ) c ng Hay ph n m m ứ ứ ầ
M c đ n v ch c Năng ứ ơ ị ứ ( ph nầ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
4
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ế ) c ng Hay ph n m m ứ ầ
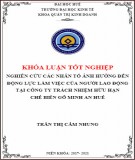
Hình 1.1 C p b c ch c năng c a AXE ứ ủ ấ ậ
ấ ủ ệ ố ầ ử ủ ọ ả ể c a h s n ph m AXE và c u trúc h th ng c a nó tuân theo t ặ ứ ấ ự ệ ố ả ứ ậ ấ ạ ượ ể ượ ả t c ấ ả ẽ ụ c d i ng d ng ệ ố c chia ra thành h th ng đi u khi n APZ và h th ng ề ứ t và APT th c hi n ch c ự ệ ố ố ệ ầ ử ế ệ ả ng h p này là BSC. c p cao nh t AXE đ ả tr ở ườ ụ ệ ố ứ ệ ố ố ủ ứ ơ c chia thành các h th ng con, các h th ng con này ự ị ằ ầ ứ ề ầ ẫ ứ ố ố ứ ề ệ
BSC là m t ph n t ộ ẩ các quy t c đ ra cho AXE. Khái ni m chính đ xây d ng AXE là tính môđun ch t ch ắ ề ệ đ c các m c c p b c khác nhau cho phép h th ng AXE đ t đ ở ượ r ng l n. ộ ớ Ở ấ ng d ng APT.APZ đ m b o kh năng x lý s li u c n thi ứ ụ năng ng d ng mà ợ ứ Hai h th ng APZ và APT l i đ ạ ượ ệ ố ệ ố đ c chia thành các kh i ch c năng. M t kh i ch c năng th c hi n m t t p ứ ượ ộ ộ ậ h p các ch c năng ng d ng và đ c đ nh nghĩa đ n tr b ng các giao ti p c a mình ụ ợ ế ượ ị đ n các kh i ch c năng khác. Nó ch a c ph n c ng l n ph n m m. ả ứ ế 4 :H Th ng Đi u khi n c a BSC, APZ ể ề ệ ể ủ ố ề Nói Chung V H Th ng Đi u Khi n BSC ấ ụ ề ể ả ể ụ ứ ử ệ ố
ẻ ử ứ ụ ờ ấ ậ ượ ế ự ộ ử c nh c u trúc x lý phân b . ố ố c n i ộ ỡ ộ ử ỗ ợ ể ố ớ ộ ử ể ở ộ ượ c n i đ n m t b x lý h tr đ giúp đ CP. ề ượ i đ thông tin t k xây d ng trên c s m t b x lý trung tâm v i các b x lý vùng đ ố ế ể c s d ng đ m r ng các ch c năng đi u khi n ở ả ứ ề ả ể t b vào/ra đ ế ị ứ ử ụ ệ xa. Các ch c năng này đ m b o nguyên lý truy n t ả xa. ở ầ ế ộ
(CPS_Central Processor Subsystem) b x lý trung tâm (CP _ Central ể ng trình và x lý s li u ử H th ng con x lý trung tâm ơ ấ ố ệ ở ộ ử c th c hi n h th ng con x lý trung tâm (CPS_Central Processor ự ượ ử
ồ ớ ộ CPS g m CP v i các b nh , b đi u khi n x lý vùng đ ng(AMU_Automatic ng t ớ ộ ề ố ả ưỡ ể ử ự ộ
tr ng thái bình th c d phòng. ượ ự Ở ạ ộ ử ậ ch đ ho t đ ng song song ti u đ ng b . Kh i b o d ế ộ ớ ộ ệ ng hai b x lý làm vi c ng ố ả ưỡ ạ ộ ị ế ườ ạ ộ ể ng tr c. Chuy n m ch phía ể ố ớ ư ở ộ ử ấ ườ ồ ự ễ ư ế
M c đích c a h th ng đi u khi n đ cung c p cho h th ng ng d ng kh năng x ủ ệ ố lý s li u và h th ng vào /ra. ố ệ ệ ố Tính m m d o thích ng các ng d ng khác nhau nh n đ ề ứ Thi ơ ở ộ ế qua các bus. Các thi ượ Hai đ u cu i báo hi u (STC/STR) đ APZ đ n các v trí ị v i m t b x lý vùng ộ ử ớ ử ệ ố C c u đi u khi n ch ươ ề Processor) đ ệ ở ệ ố Subsystem). Ph n c ng ầ ứ ở (RPH_Regional Processor Handler) và kh i b o d Maintenance). Vì các lý do tin c y CP đ đ c l p v i nhau nh ng ộ ậ đ ng giám sát hai b x lý và quy t đ nh b nào th t ự ộ th ng m t ch a đ n 10 ms và không gây nhi u đ i v i thông tin ườ ườ H th ng con x lý vùng ( RPS_Regional Processor Subsystem) ỏ ệ ố ử ệ ư ử ả
ng tr c th ự ệ ố ệ ự ộ ử ứ ộ ử ứ ươ ằ RPS th c hi n công vi c đòi h i có kh năng nh x lý giao th c. H th ng con này ch a các b x lý vùng (RP_Regional Processor) và các b x lý vùng môđun m ở ng trình và r ng (EMRP_Extension Module Regional Processors) b ng các vi ch ộ th ườ ng tr c đ x lý ph n m m ng d ng. ầ ự ể ử ề ứ ụ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
5
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ả ể ượ ự ch đ chung t ộ i. Đ tin c y EMRP ậ ộ ộ ử ệ ở ế ể ố ế ườ c d phòng. B đi u khi n máy thu phát (TRH) là m t b x lý vùng ệ ừ ị ậ xa. c d phòng và làm vi c ộ ề ệ giao ti p A-bis. Trách nhi m ể ế ng cho thu t toán đ nh v . ị ể ệ ố ở ớ
ng
ụ ẩ ể ồ ờ ể ủ ệ ố i s a ch a đ s a ch a các s c ữ c MAS s d ng thu c v ử ụ các b x lý đ ộ ử ượ ạ ộ ề Các RP đ cùng có th đ ể ượ ự v i m t m ch giao th c HDLC đ k t cu i báo hi u t ứ ạ ộ ớ ch y u c a TRH là x lý đo l ử ủ ế ủ RPS cũng có các đ u cu i báo hi u trung tâm/ vùng đ thông tin v i cácEMRP ầ Ở H th ng con b o d ả ưỡ (MAS_Maintenance Subsystem) ệ ố ả MAS th c hi n các ch c năng đ phát hi n s c , khôi ph c, h i chu n và t o ra c nh ộ ệ ự ố ứ ệ ự ạ các ph n m m trung tâm c a h th ng đi u khi n APZ, đ ng th i là h báo ẫ ng d n ề ề ướ ầ ở CP. cho ng ữ ể ữ ườ ữ ự ố ở MAS ch g m ph n m m.Các m ch giám sát ở ề ầ ỉ ồ CPS.
ử ệ ố ệ ươ ủ ệ ố H th ng con x lý h tr ỗ ợ (SPS_Support Processor Subsystem) SPS cung c p c t lõi c a h th ng đ qu n lý vi c th c hi n ch ấ ố ỗ ợ ứ ươ ượ ệ ụ ở ộ ử b x ng trình i, giám sát ti n trình và các ế SP. CP và SP EMRP ộ ử
ồ ệ ố STC ỗ ợ H th ng con giao ti p ng ế ể ả ủ ụ ng trình đ ư ầ ứ (MCS_Man-Machine Communication Subsystem) ng. i-máy cho các ch c năng khai thác và b o d ả ưỡ ứ ấ ữ ả c xây d ng trên c s các khuy n ngh CCITT X.29/X ự ế ị ET C t là VT ố ơ ở ộ ố ầ ế c đ u n i, đ c bi ố ố ượ ệ ấ ặ
i máy là m t t p con c a CCITT-MML. ộ ậ c đ t b t c n i nào có th ch đ l nh ngôn ng ng ộ ầ ủ ể ượ ặ ấ ứ ơ ể ệ ự lý h tr (SP_Support Processor), các th t c kh i đ ng l ạ ở ộ c th c hi n ch c năng nghi p v cho các ch ệ ở ự SPS g m b x lý h tr cũng nh ph n c ng l u gi ữ ở ư STR i– máy ườ MCS cung c p giao ti p ng ườ ế MCS qu n lý hai d ng thông tin: ch cái s và các c nh báo. ạ ả ET GS Giao ti p đ u cu i đ ố ượ ầ C .28/X.3-1980 (Sách vàng) cho phép m t s đ u cu i đ 100 và VDU. ữ ườ Ở ế ộ ệ M t đ u cu i và m t kh i n i thông c nh báo có th đ ộ ố ố ố tr m RBS. thâm nh p đ n b x lý vùng, ch ng h n ộ ử ả ạ ở ạ ế ẳ ậ
ạ
Tr mạ BSC RPB Tr m vô tuy n ế EMRPB
Đ ng PCM ườ
ộ ử ở ộ
EMRP B x lý vùng môđun m r ng Bus EMRP EMRPB ETC M ch đ u cu i t ng đài ố ổ ầ ạ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
6
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
GS RP RPB STC Đ u cu i báo hi u trung tâm ố STR Đ u cu i báo hi u vùng ố Chuy n m ch nhóm ể ạ B x lý vùng ộ ử Bus RP ầ ầ ệ ệ
xa ặ ở
ệ ố ả ả ả ộ , đĩa c ng, đĩa m m ớ ớ Hình 1.2 EMRP đ t (FMS_File Management Subsystem) FMS đ m b o b ừ b x lý h tr . ỗ ợ ề ở ộ ử ứ
H th ng con qu n lý file nh l n bên ngoài: các băng t H th ng con thông tin s li u ng. Các biên ở ố ệ ố ệ (DCS_Data Communication Subsystem) ả ưỡ ụ c đ t ệ b x lý h tr . ỗ ợ ứ ượ ặ ở ộ ử
ộ ủ ứ ướ ầ ư c tùy thu c vào các yêu c u l u ụ Toàn b ph n c ng c a BSC có kích th ủ i 512 máy thu 256 ô. Đi u này có nghĩa là ụ ụ ớ ệ ố DCS đ m b o thông tin s li u g i cho các ng d ng khai thác và b o d ả ả c th c hi n là X.25 và X.75. DCS đ b n đ ự ả ượ 5 :Các đ c tính ặ ộ ứ ự ạ ủ ề ở
ti u đ phù Tuy nhiên không th đ t các gi ạ ớ i h n này b ng dung l ằ ể ể ặ ộ ử ủ ứ ề ự ệ ớ ộ ử ể ứ ạ ươ ạ ộ ố ể ạ t trong t ụ ể ứ ự ợ ố ể ỏ ở ướ ố c t i ề máy ba t ặ ừ ặ ở
ầ l ng c a các ng d ng khác nhau. ượ C u hình c c đ i c a BSC ph c v t ấ ph c v đ c 100.000 thuê bao. ụ ụ ượ ng x lý. ể ể ử ượ ớ Trong ch ng trình c a AXE có các b x lý trung tâm đi u khi n các ng d ng l n. ụ ươ ậ Các b x lý trung tâm này cùng v i các b x lý ngo i vi cho phép th c hi n các thu t ộ ử ng lai cho các m ng có vi toán chuy n giao ph c t p và nhanh h n c n thi ế ơ ầ ô.M t khác có th gi m đ n m c c c h p các ng d ng đi u khi n m t s dung ể ả ề ứ ặ ng nh các tr m vô tuy n g c. 30 TRX đi u khi n b i BSC có th là kích th l ạ ượ thi u phù h p đ ể ủ ợ ượ Ph n III : H Th ng Tr m G c – BTS ệ ầ I , Gi ệ
ố
ễ
ế
1. T ng Quát ế ế c cài đ t v a v n ố ố ạ i Thi u H Th ng BT (Nguy n Ti n Văn ) ệ ớ ổ ạ ạ ủ ế ố ế ấ ả t ồ ạ ế ở ạ ẩ ế ị ề ả t c các thi ủ ộ ế ậ ủ tr m vô tuy n dù tr m ph m t hay nhi u ô. ở ề CME 20. nhi m v ch c năng ch y u c a nó là truy n ủ ế ủ ụ ứ ệ
i xác đ nh RBS trong h th ng. v m t v t lý RBS ph i đ c đ t v trí ả ượ ặ ở ị ệ ố c s bao ph vô tuy n c n thi ề ặ ậ t. ị ể ạ ượ ự ế ầ ủ ế
Tr m vô tuy n g c 200(RBS 200) là s n ph m c a ericsson dùng cho tr m thu phát g c GSM (BTS). Nó bao g m t ế ầ t b giao ti p truy n d n và vô tuy n c n ề ẫ ố thi RBS 200 là b ph n c a BSS ộ d n vô tuy n. ế ẫ Hình v d ẽ ướ g n anten đ đ t đ ầ 2. Ch c Năng ứ ứ ề Các ch c năng ti m năng chung Các ti m năng chung bi u th các ti m năng chung c a TRS đ ề ư c s d ng cho l u ượ ử ụ ủ ể ề ị thông v i các MS thu c v m t ô.
ứ ị kênh BCCH. N u c l u gi TRX đ c giành ớ ứ ả th ng đ ố ộ ề ộ Ch c năng này bao g m các ch c năng con sau: ồ Qu ng bá thông tin c a h th ng. BSC xác đ nh các thông báo v thông tin c a h ủ ệ ố và đ nh kỳ qu ng bá b i TRS ở ả ị ề ế ở ượ ư ủ ệ ượ ữ ở
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
7
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ế ế c ch n ch u trách nhi m kênh BCCH. c xác đ nh t c g i đi BSC đ kênh cho BCCH x y ra s c , s c đ ả TRX m i đ ớ ượ ọ ị Tìm g i. các nh n d ng tr m di đ ng đ ạ c báo cáo đ n BSC, BSC g i thông tin BCCH đ n m t ộ ự ố ự ố ượ ử ọ ệ ậ ượ ử ượ ừ ạ ộ ở ị CCCH. các MS và báo cáo chúng t ừ ừ ệ ầ i ớ DCCH sau đó MS MS, TRS phát hi n các yêu c u kênh t ộ ở ị ộ
ệ ữ c n đ nh m t TCH cho thông tin ti ng và s li u. ố ệ kênh CCCH t Yêu c u kênh t ầ ấ ị ứ ế ộ ệ ở ừ ế ẽ ử ụ BSC đ n MS là nó s s d ng BSC. BSC n đ nh m t kênh DCCH cho báo hi u gi a MSC và MS. đ ượ ấ n đ nh t c th i.TRS phát đi m t l nh Ấ ị ờ . m t kênh trong ô ộ
AUC
VLR HLR SS EIR
OMC External Telephony and data communicatio MSC
Base Station System
BSC
BSS
RBS
Information transmission Call connections and Information transmission
MS
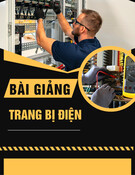
Hình1.3 : mô hình h th ng GSM ệ ố
AUC Authentication Centre BSC Base Station Controller RBS Radio Base Station EIR Equipment Identity Register HLR Home Location Register MS Mobile Station MSC Mobile Services SwitchingCentre OMC Operation and MaintenanceCentre VLR Visitor Location Register BSS Base Station System
Các ch c năng ti m năng riêng ứ ề
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
8
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ề ị ấ ả ớ c s d ng cho thông tin v i ượ ử ụ
t c các ch c năng TRS đ ụ ụ ộ ứ ứ ư ạ ộ Ti m năng riêng bi u th t ứ ể các MS thu c v ph n TRS ph c v m t ô. ộ ề ầ ồ ạ ộ ằ Ch c năng này g m các ch c năng con sau: Đ a kênh vào ho t đ ng. BSC ra l nh cho TRS đ a vào ho t đ ng m t ti m năng ượ ấ c n ư ế ủ ể ử ụ ộ ộ ề ệ kênh riêng đ s d ng b ng m t kênh logic liên k t c a mình. Khi m t kênh đ ộ đ nh BSC thông báo TRX v các thông s nh ki u kênh, mã kênh vv… ị ố ư ể ề ủ ở ầ ậ ự ậ th t c nh n th c t H y ho t đ ng kênh. TRS h y ho t đ ng kênh riêng. ạ ộ Kh i đ u m t mã. Kh i đ u m t mã đ ượ c tính toán ậ ạ ộ ậ ượ ở ủ ụ ự ừ c TRS th c hi n trên c s khóa m t mã. ơ ở ủ thông s RAND và khóa riêng c a ệ ố ủ ở ầ Khóa m t mã đ ậ thuê bao.
ứ Các ch c năng kênh m t đ t ặ ấ Các ch c năng kênh m t đ t là nhóm các ch c năng th c hi n chuy n đ i mã và thích ặ ấ ứ ệ ể ổ ự ng s li u. Ch c năng này bao g m các ch c năng con sau: ứ ứ Chuy n đ i mã hóa ti ng. đ ồ c th c hi n gi a 64kb/s và 13kb/s. ch c năng này đ ượ ứ ố ệ ể ứ ệ ượ c ự ứ ữ ế BC. đ t ặ ở c th c hi n gi a 64kb/s và 3,6kb/s; 6 hay 12kb/s ch c năng này ữ ự ứ đ ệ TRAU trong BSC. ố ộ ượ ở xa. Thông tin đi u khi n đ c b sung đ n s ề ở ế ố c ghép chung ế ệ ẫ ể ượ ổ ượ ổ xa trong TRAU ở Thích ng t c đ đ ứ xa c đ t ượ ặ ở Đi u khi n trong băng c a TRAU ủ ể ề li u và ti ng d n đ n t ng t c đ c a kênh là 16kb/s, 4 kênh thông tin đ ế ổ ố ộ ủ vào m t kênh 16kb/s gi a BSC và TRS ữ ộ
Mã hóa và ghép kênh Mã hóa và ghép kênh là ch c năng l p khuôn d ng thông tin ứ ạ ậ ở ứ các kênh v t lý. Ch c ậ
ượ c l p khuôn d ng cho t ng khe th i gian ứ ề ồ ừ ạ các kênh v t lý. ậ ậ kênh v t ở năng này bao g m các ch c năng con sau: ồ Ghép kênh đ ng truy n vô tuy n. các kênh logic đ c ghép chung ở ế ườ Mã hóa và ghép kênh. Lu ng bít đ ờ ượ ậ lý. i m t mã b ng khóa m t mã ậ ượ ế ậ ậ ằ ậ ả
i m t mã. Ti ng đ ậ ả ể ệ ố ề ề ề ể ế ế M t mã/ gi c m t mã và gi Đi u khi n h th ng con vô tuy n ế ề ứ Đi u khi n h th ng con vô tuy n đ m b o đi u khi n các ti m năng vô tuy n. ch c ả ả năng này bao g m các ch c năng con sau: ể ệ ố ứ ồ ng. các phép đo ch t l Đo ch t l ấ ượ ấ ượ ự ườ ộ ệ ượ ạ ộ ng và c ừ ng đ tín hi u đ ế MS v ch t l ờ ế ng lên( t ườ ộ ạ ộ MS đ n BTS). Các phép đo này đ ề ấ ượ ừ ả t c c th c hi n t ệ ở ấ ả c th c ự ượ ườ ng ng đ BTS đ n MS), TRS đ n MS đ đ nh tr ệ ượ ể ị ướ ừ các kênh riêng ho t đ ng trên đ hi n trong th i gian ho t đ ng m t kênh. Các k t qu đo t ệ xu ng( t ố ừ Đo đ ng b th i gian. M t tín hi u đ ồ ừ ờ ề c phát đi t ễ ớ ố ệ c th i ờ ụ ộ ờ ộ ể ộ ờ ế ề ườ ồ c báo cáo cho BSC. ế ộ ờ ẫ ế ậ ồ ượ ệ c đi u khi n t ấ ủ ể ừ ượ ể ề gian truy n d n đ n TRS đ bù tr th i gian tr gây ra do truy n sóng. TRS liên t c giám ng lên, đ ng b th i gian sát và c p nh t đ ng b th i gian. Cùng v i s li u đo cho đ ậ hi n th i cũng đ ờ ề BSC đ gi m t ể ả Đi u khi n công su t c a TRS và MS. Công su t c a TRS Và MS đ i thi u m c công su t phát đ gi m nhi u đ ng kênh. ấ ấ ủ ứ ể ả ể ễ ố ồ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
9
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ế ả ầ ự ạ c th c hi n b ng chuy nm ch Phát. Phát vô tuy n bao g m nh y t n. nh y t n đ ả ầ ượ ồ ầ ố ệ ằ ệ ể ế ừ
c phát hi n và báo cáo cho BSC ng truy n vô tuy n. s c đ ự ố ượ ề ệ
ể băng t n c s v i máy phát khác nhau cho t ng t n s Thu. Thu tín hi u vô tuy n bao ầ ơ ở ớ g m c cân b ng và phân t p ậ ằ ả ồ S c đ ự ố ườ ế Đi u khi n TRX ề Đi u khi n TRX là ch c năng đ đi u khi n TRX. Ch c năng này bao g m các l nh sau: ể ệ ồ ề ể ể ề ệ i. phát hi n và báo cáo l ứ LAPD. K t cu i đ ố ườ ế Báo cáo l ệ ỗ BSC ng n i thông nào b gián đo n ng vô thông báo t ố ườ ệ ị đ ạ ở ườ ứ ng báo hi u gi a BSC và TRS ữ i ừ ỗ ở S c n i thông. TRS phát hi n xem có đ tuy n hay không.
ự ố ố ế
TRS Đ ng b ố c l y ra t ng PCM t BSC ờ ượ ấ ẩ ầ ố ộ ở ị ườ ừ ố ừ ừ ộ ế các đ b đ m s khung. ố
ọ ố ạ ở ộ ầ Ch c năng này bao g m các ch c năng con sau: ộ ồ Đây là kh i con đ ng b ồ Chu n t n s . thông tin đ nh th i đ S khung. Có th đ t và đ c s khung t ể ặ Kh i đ ng h th ng và n p ph n m m ề ệ ố ồ ứ ứ ở ộ ệ ố ở ầ ả ạ ầ ạ ộ ồ ề ộ ử t b vào m t tr ng thái nh t đ nh. i. đ a m t b ph n c a thi ộ ạ c kh i đ ng. ượ ở ộ ộ ộ ậ ủ ạ ư ộ ạ ấ ị ế ị
ầ Kh i đ ng h th ng. kh i đ u m t tr m hay m t ph n tr m bao g m c n p ph n m m cho các b x lý đã đ Kh i đ ng l ở ộ L p c u hình ậ ấ L p c u hình là vi c l p các thông s khác nhau và t TRS ố ở ng và/ ho c cho khai thác. Ch c năng này bao g m các ch c năng con sau đây: h p các kênh khác nhau ứ ổ ợ ồ ứ i h n công su t ra cho máy phát. ớ ạ t l p t n s và gi ấ t l p t n s cho các máy thu k c máy thu không nh y t n và ể ả ả ầ ệ ậ ậ ấ cho l u l ặ ư ượ Phát vô tuy n: thi ế ậ ầ ố Thu vô tuy n : thi ế ậ ầ ố ế ế
các khe th i gian. ờ ở ế ệ ố các kênh v t lý. ậ ạ
Đi u khi n b o d Các ch c năng khai thác và b o d ể ượ ử ụ ầ nh y t n. ả ầ Đi u khi n vô tuy n: đ nh nghĩa vi c s p x p thông tin h th ng ể ề ị ệ ắ ế K t h p kênh logic: s p x p các kênh logic ở ắ ế ế ợ Ân đ nh nh n d ng ô: thi ạ ế ậ ậ ị ể ả ưỡ ề ạ ả ưỡ ố c s d ng không c n n i ấ ổ t b này ch có các ch th tr ng thái và c nh báo đ cung c p t ng ả ỉ ế ị ng t ỉ t l p mã màu tr m c s và mã màu PLMN ơ ở ng t i ch ỗ ạ i ch có th đ ỗ ị ạ c th c hi n ệ ở ầ ố đ u cu i t và đi u khi n nhân công đ ể ượ ề ế ể ự
c th c hi n theo 2 cách sau: ứ ự ệ ườ c th c hi n t. bao ể ể ể ệ ặ ng. t hay các đi u ki n đ c bi ề ệ ặ ệ ứ RBS thi v i BSC. ở ớ quan. T t c ch th , trình bày chi ti ị ấ ả ỉ i ch (LMT) b o d ng t ỗ ạ ả ưỡ Qu n lý đ ng báo hi u ệ ườ ả ng báo hi u gi a BSC và MS. TRX qu n lý đ ệ ữ ườ ả Giám sát và ki m tra ch c năng ứ ể ượ c th c hi n khai thác bình th ệ ở ẫ ự các l nh đ c bi ầ ự ầ ứ ệ ệ ề ả Giám sát và ki m tra ch c năng đ 1. Các ki m tra l p trong đ ắ ượ 2. Các ki m tra đ ượ g m c ki m tra c ph n c ng l n ph n m m. ả ể ồ 3.c u trúc RBS ấ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
10
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
RBS 200 bao g m các kh i ch c năng chính sau đây: ố ứ xa(TRI)
ế ệ ố ồ
ồ Giao ti p thu phát ở H th ng con thu phát(TRS) g m có Nhóm thu phát( TG ) Đ u cu i b o d i ch (LMT) ng t ố ả ưỡ ầ ạ ỗ
TRI
BSC LMT RBS 200TRS
TG TG
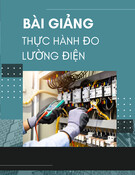
ữ ẻ ộ Trong đó: TRI là m t chuy n m ch cho phép đ u n i m m d o gi a BSC và TG. ế ị ồ t b vô tuy n n i chung đ n m t anten phát ầ ế ộ i s d ng v i các ch c năng khai thác và b o d ng nó Hình 1.4: S đ kh i RBS ơ ồ ố ề ạ ể ố ấ t b vô tuy n tr m. t c các thi ế ở ạ ấ ả ế ố ế ị ứ ấ ả ứ ớ ế t c các thi ườ ử ụ ả ưỡ ế
ở TRS bao g m t TG là ph n ch a t LMT là giao ti p ng có th n i tr c ti p đ n m i TG hay qua TRI đ n BSC. ể ố ự ế ọ ế Giao ti p thu phát xa ế TRI l y các khe th i gian ở ố ủ ờ i ch (LMT) mach 2Mbit/s giành cho các kh i c a RBS và g i các khe ầ ố ả ưỡ ử ng t ạ ả ỗ ấ còn l i đ n RBS ti p theo. Các c nh báo ngoài(EA) và đ u cu i b o d ế ạ ế c n i đ n TRI. đ ượ ố ế
STR NEXT TRX TRX LMT c nh báo ngoai ả I/O V2 BSC RBS ETB ETB RTT RTT EMRP
TSW
Hình 1.5 : s đ kh i TRI ơ ồ ố
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
11
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ể ờ ượ ố ế ệ c r t
c n i qua đ u cu i báo hi u vùng(STR) đ n b x lý vùng modul m ờ ế ớ ế ộ ườ ề ẫ ế
t b vô tuy n t c các thi c n i đ n ETB, m t PCM/ETB. Khe th i gian đ BSC đ Đ ng PCM 2Mbit/s t ộ ừ ườ ở đi u khi n đ ế ộ ử ố ầ ể ượ ố ề i TRX hay r ng(EMRP), LMT và c nh báo ngoài. Các khe th i gian s li u đ ố ệ ượ ẽ ớ ả ộ c n i đ n m t đ đ ể ố ế ng 2Mbit/s m i đ n RBS ti p theo. 3 hay 8 TRX có th n i đ n ượ ố ế m t đ u cu i truy n d n vô tuy n. ố ộ ầ H th ng con thu phát ệ ố H th ng con thu phát bao g m t ệ ố ầ tr m và g m các ph n ồ ế ở ạ ấ ả ế ị ồ
chính sau: - Nhóm thu phát(TG_Tranceiver Group) - Đ u cu i b o d ng t ỗ ạ ầ ố ả ưỡ ch a đ n 16 máy thu phát(TRX) đ ượ ố ế c n i đ n ộ Nhóm thu phát(TG) là m t ph n t ộ ầ ử ứ ế ộ ượ ự c xây d ng i ch (LMT_Local Maintenance Terminal) ộ ụ ụ ể ụ ụ ề ộ ậ ủ ỗ ố
ộ ậ ể ơ ở ộ ề ố ử
cùng m t anten. M t TG ph c v cho m t hay nhi u b ph n c a ô. Máy thu phát(TRX) có th ph c v 8 kênh song công toàn t c. m i TRX đ trên c s năm b ph n - B đi u khi n TRX(TRXC_TRX Controller) - Kh i x lý tín hi u(SPP_ Signal Processing Part) ệ - Máy phát vô tuy n(RTX_ Radio Transmitter) ế - Máy thu vô tuy n(RRX_Radio Receiver) ế - Chuy n m ch băng t n c s (RBX) ể ạ ầ ơ ở ề ầ TRXC: TRXC là ph n đi u khi n c a TRX. Cho báo hi u có m t đ ể ủ ệ ộ ườ ố ộ ườ ố ệ c nhóm chung thành m t đ ng n i ố ng n i 16Kbit/s đ n b chuy n ể ế ộ ng n i 64 Kbit/ ố ộ ườ ở ế 64kbit/s đ n BSC và m i kênh ti ng / s li u có m t đ đ i mã ổ s (nghĩa là 3 đ ố ệ ượ ộ ạ ỗ ế ế BSC. B n đ ng ti ng s li u đ ố ườ ng n i 64 kbit/s cho m t TRXC) ố ườ ầ ử ề ỗ ệ ủ ể ề ẳ ỗ ể ư ằ ể ả ờ ớ ộ ọ ồ SPP: là ph n x lý tín hi u c a TRX. Nó đi u khi n, ch ng h n, cân b ng viterbi và mã hóa kênh. M i SPU đi u khi n 2 khe th i gian. L u ý m i TRXcó th qu n lý 8 TS ờ t ươ ứ ể ể ồ ấ ầ ố ứ ể c đi u ấ ượ ạ ế ỉ ả ộ ể ề ế ầ ế ấ ạ ế ồ ng ng v i 8 cu c g i đ ng th i. Máy phát: Máy phát (RTX) là ph n vô tuy n đ phát RTX bao g m các ch c năng đ ế ầ đi u ch nh t n s và c b khu ch đ i công su t. vì khu ch đ i công su t đ ề ạ ỉ xa nên có th đi u ch nh công su t mà không c n đ n tr m. khi n t ể ừ ứ Máy thu: Máy thu vô tuy n (RRX) Là ph n vô tuy n đ thu. RRX bao g m cà ch c ể ầ ng c a phading. M i RRX tr c thu c m t TRX riêng. ừ ả ủ ự ể ậ Chuy n m ch băng t n c s : Khi RBS có nh y t n, TRX s đ ế năng phân t p đ bù tr nh h ạ ưở ầ ơ ở ộ ộ ẽ ượ ổ ể ỗ ẩ ầ ể ố ừ ữ ạ ự ả ờ ầ ơ ở ế ị ờ ờ ấ ầ ố c s d ng đ nh n đ ồ ẩ ấ ể ậ ượ ộ ố ẩ ượ ử ụ ị ủ ệ ộ ồ ể c b xung chuy n m ch băng t n c s (BBX) gi a TRXC và RTX chuy n m ch này n i t ng c m tín hi u ệ ạ ụ TRXC đ n RTX hi n th i theo trình t nh y. t ệ ừ Modul đ nh th i: Modul đ nh th i(TM_ Timing module) cung c p t n s chu n l y ra ị đ ng h PCM thu cho các máy thu phát. T n s chu n đ t c b ầ ố ừ ồ nh chính xác cao c a các t n s thu phát TM cũng ch u trách nhi m đ ng b khung và s ầ ố ớ khung tuy t đ i.
ệ ố ộ ế ợ m t s RTX đ n m t anten. B k t h p là m t b k t h p t B k t h p máy phát: B k t h p máy phát(TXCMB_ Transmitter combiner) k t h p ế ợ đi u ch nh. ỉ ộ ộ ế ợ ự ề ộ ế ợ ế ộ ế ợ ộ các tín hi u t 16RTX có th n i đ n m t b k t h p. ệ ừ ộ ố ể ố ế ộ ộ ế ợ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
12
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
B ghép các máy thu: B ghép các máy thu (RXMC) phân ph i các tín hi u t anten ệ ừ ộ ộ ố
B ki m tra TRX:B ki m tra TRX(TRXC) th c hi n ki m tra ho t đ ng c a TRX. ạ ộ ủ ự ể ệ Nó đ ộ ể c đi u khi n b i BSC
TC H /R S
IS L
ạ ỗ ạ ế ườ ng t i ch (LMT) là giao ti p ng i, ng. có th n i LMT đ n BSC qua ỗ TR E F W /S W ể ố O & M /T ELE CO M ế ố ả ưỡ ả ưỡ BS BSC ở
c các ch c năng O&M ộ ổ
TRE
AN x FW IS L
O M L /IO M /IO
Có th nuôi RBS 200 b ng các đi n áp danh đ nh sau: thu đ n các RRX . ế ộ ể ượ ể ở ề Đ u cu i b o d i ch : Đâu cu i b o d ng t ầ ố ả ưỡ máy v i TG cho các ch c năng khai thác và b o d ớ ứ EBCB TMI đ đ t đ ứ ể ạ ượ B đ i ngu n ồ ằ ể ệ ị
AN x
C ONF
ế - + 24VDC 230 VAC - - -(48 đ n 60) VDC. 4.các đ c tính ặ
BS 1
OM U
IS L ứ ộ
ả ẩ ả ậ
ISL pilo ấ ượ tt ả ưỡ
Tính tin c yậ Tính modul và ch t l Tính b o d thi ự ố ả ế ị ở ố ự ố ượ c
t b . các kh i s c đ FA C B
AN y ng s n ph m cao đ m b o m c đ tin c y cao. ả ng H th ng khai thác và h tr tìm ra các s c x y ra ỗ ợ ệ ố đ nh v đ thay th t ị ị ể Tính b o d
TR A N S& ế ạ CL O C KK ng cũng đ
IS L ố ợ
c tăng b ng cách đánh s các kh i h p lý và rõ ràng. i ch ỗ ượ ả ưỡ ằ ố
A C /D C& BA T T E IE S
IS L
ệ ố
ố
ấ
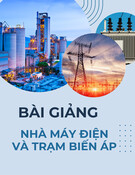
II . K t n i các kh i ch c năng trong h th ng BTS (Nguy n Văn Hu n ) Giao ti p bên trong BTS đ
ễ c th c hi n thông qua các bus BCB và BSII.
ế ố ế
ứ ượ
ự ệ
K T N I BÊN TRONG Ế Ố
BTS TERM
BS C
Abis
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
13
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
Hình 1.6 : K t n i các kh i ch c năng trong h th ng BTS ế ố ệ ố ứ ố
c k t n i d n t t c các module trong BTS. ể c s d ng đ trao đ i thông tin gi a SUMA và các module khác. Bus n y ch s ỉ ử ầ ượ ử ụ ế ố ế ấ ả ữ ng. ụ ể ậ ả ưỡ ồ hai ch đ đó là master bus hay là slave bus. Master đ ậ ở ế ộ t bên ngoài đ ượ ọ c g i ượ ế ố ế c k t n i đ n ệ ụ ặ c xác l p ượ ọ ể ượ ử ụ c g i là terminal. M t d ng c đ c bi c s d ng nh là m t pilot. ư ở ể ệ ượ ộ ụ ộ ấ ề c ki m tra b i vi c quét các bus đi u ệ
i trong quá trình c cung c p b i BCB thì không gây ra l ỗ ư ấ ở ậ ậ ậ ể ể c switch on. ư ả ượ
ệ c s d ng đ mang các lo i thông tin sau: ượ ử ụ ể ạ
SUM_OMU đ n các th c th đ ế ự ả ề ấ ữ ử ữ ệ ể ủ ộ ử ệ ậ ạ ượ ừ c t
ở ế i BTS thông qua giao di n Abis trên đ BSC đ a t ng truy n PCM g m có ư ớ ườ ề ệ ồ
ệ ng OML (operation maintenance link) Tín hi u tho i TCH (traffic channel) Tín hi u báo hi u RSL (radio signalling link) Tín hi u v n hành b o d ả ưỡ Tín hi u truy n d n Qmux 1 . BCB(Base Station Control Bus): BCB: Bus đi u khi n BTS d ượ ề Nó đ ổ d ng cho m c đích v n hành và b o d ụ Lu ng Thông Tin Bus BCB đ ượ là pilot, slave đ XBCB có th đ Cho m i module, vi c thêm vào hay l y ra đ ỗ khi n.ể Vi c m t b t c đ c tính nào đ ấ ấ ứ ặ ệ ượ ho t đ ng c a BTS nh là: c nh báo, truy nh p remote inventory… ủ ả ạ ộ Thông tin v b n ki m kê module có th truy nh p th m chí khi module switch off. ề ả Nh ng mà SUMA ph i đ 2. BSII (Base Station Internal Interface): BSII là giao di n chính bên trong BTS .Lu ng thông tin ồ BSII đ • TCH • RSL • OML cho SUM_OMU • Các báo hi u bên trong: phát qu ng bá t ể ượ ế ố c k t n i ừ ệ đ n BSII các thông tin IOM_CONF(thông tin v c u hình ), nh ng thông đi p O&M ệ ế bên trong gi a OMU và TRE/Anx/TRANS&CLOCK, nh ng thông đi p cho ki m tra. 3.2 Nguyên lý ho t đ ng c a BTS ạ Nguyên lý ho t đ ng c a BTS d a trên quá trình x lý các tín hi u mà nó nh n đ ư ủ ộ máy di đ ng và t BSC. ừ ộ 3.Tín Hi u T BSC G i Đ n ệ ừ Tín hi u t ệ ừ các tín hi u sau: ệ ệ ạ ệ ệ ậ ệ ề ẫ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
14
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
Các tín hi u này đ ệ ượ
c phân b trên khung PCM nh sau ư SYN ố ST0
Qmax TCH TCH TCH TCH TCH TCH TCH TCH
RSL
OML ST 31
ờ ấ ượ ử ụ c s d ng cho m c đích đ ng b . ộ ụ ồ ể ệ c s d ng đ truy n d li u TCH, tín hi ubáo hi uvô c s d ng đ truy n tín hi u Qmux. ề i đ ể ề ử ệ ệ ệ ng( RSL/OML). ạ ượ ử ụ ả ưỡ ế c chia thành 4 nibble m i nibble 16Kbps đ ượ ỗ ượ ử c s ng TCH. Trong c u trúc khung PCM thì khe th i gian TS0 đ TS1 d ượ ử ụ Các khe th i gian còn l ờ tuy n và tín hi u v n hành b o d ệ ậ Các khe th i gian trong khung PCM đ ờ d ng cho m t kênh l u l ộ ụ ư ượ
ộ ệ giao di n Abis thì m t RSL chi m toàn b m t khe th i gian trong ế ng c a RSL s ộ ộ ứ ẽ ở ụ ờ ủ ố ượ
ệ ệ ầ ử ụ ế ẽ ố ượ ng. M t OML s chi m m t TS trong khung PCM và s l ộ ố ộ ẽ ụ ng OML s ph thu c vào s BTS. M i OML s ph c v ch cho m t BTS. ỗ ấ ứ ng ộ ử ụ ẽ ụ ụ ỉ ố ờ ệ ự ứ ử ụ ộ ả ế ề
ng truy n Qmux qua giao di n abis: ấ ườ ề ậ ệ ữ ể ầ c đi u khi n b i BSC. Quá trình đi u khi n n y ể ề ầ ở ề ầ ượ ư ể ố ờ c đ a vào khung th i ệ ở ệ khe th i gian TS1. Tín hi u n y chi m 1 nibble 16Kbps. Thông qua giao di n ờ ề ế ệ c đ a đ n kh i SUMA và k t cu i t ẫ i ph n truy n d n ố ạ ế ề ầ ầ ệ ệ ầ i tín hi u đi u khi n đ n kh i TRANS. ố ế ể ố ượ ư ế ứ ể ử ư ố ư ế c k t cu i t i ph n truy n d n, đ th c hi n quá trình đi u ề ể ự ượ ế ố ạ ố ầ ề ệ ẫ ể ề ẫ ệ ố ạ ố ả ưỡ ệ ử ậ c đ a đ n kh i TRE ậ ng. đây s Trong khung PCM ộ ộ khung và s RSL ph thu c vào s TRX mà m t BTS có. T c là s l ố ố b ng s TRX. ố ằ Trong khung PCM còn có tín hi u OML tín hi u n y s d ng trong quá trình khai thác và b o d ả ưỡ đ ườ Ngoài ra trong BTS c i ti n cung c p ghép kênh th ng kê. T c là s d ng khe th i gian ớ 64Kbps s d ng truy n cho 4RSL và 1OML, t c là th c hi n quá trình ghép 4 RSL v i 1OML. Cung c p đ ệ ề Trong quá trình ho t đ ng ngoài nh ng thông tin báo hi u và thông tin v v n hành và ạ ộ ng thì BTS cũng c n đ b o d ượ ả ưỡ đ c th c hi n b i kh i TSC c a BSC. L nh đi u khi n n y đ ủ ự ượ gian PCM ở Abis nó s gi ề ẽ ở Các tín hi u này đ u tiên đ ệ c a kh i này, sau đó nó đ a đ n các kh i ch c năng khác đ s lý nh sau: ủ 9 Tín hi u Qmux đ ệ khi n truy n d n. i kh i OMU, kh i nh n thông tin ng thì k t cu i t Các tín hi u v v n hành b o d ế ề ậ ố O&M, x lý và đ a ra các l nh liên quan đ n quá trình v n hành b o d ả ưỡ ế ư Các tín hi u v l u l ng và báo hi u s đ ở ệ ẽ ượ ư ế ề ư ượ ẽ ệ ố
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
15
Chuyªn ®Ò Th«ng Tin V« Bài Tiểu Luận TuyÕn
ệ ư ế ử ồ ớ i antenna r i phát ra môi ồ ự ườ ế th c hi n quá trình x lý tho i và sau đó đ a đ n ANC r i t ạ tr 4. Tín Hi u Thu T Máy Di Đ ng MS (Mobile Station) ng vô tuy n. ệ ừ ộ
ệ ừ c t ượ ừ c truy n xu ng kh i Anc, ố ố ạ ạ ố ủ ế ề ử ệ ả i đ nh d ng c m, gi ẽ ọ c x lý ở ượ ử ố ị ạ ạ ả ả ố ạ i mã hóa tho i. Tín hi u sau đó đ i đây nó th c hi n quá trình ghép các tín hi u các tín hi u l ệ ệ ạ i ph n truy n d n(transmission) sau đó qua c th c hi n t ề ẫ ự ự ầ Hình 1.7 :Tín Hi u Thu T Máy Di Đ ng MS ộ MS qua antenna c a BTS và sau đó đ Tín hi u thu đ ề ủ ượ ệ kh i này s l c, khu ch đ i t p âm th p(LNA) và chia các tín hi u thu (spliters), ệ ấ ế ố ố c đ a đ n kh i th hai đó là kh i kh i Anc tín hi u ti p t c đ sau khi đ ứ ế ụ ượ ư ế ệ ề TRE, đây là kh i ch u trách nhi m ch y u v quá trình x lý tho i nh là gi i đi u ư i mã hoá kênh và gi ch , gi c ượ ụ ả ị ệ ế i trên đ a đ n kh i SUMA t ệ ạ ố ư ế khung PCM, quá trình này đ ệ ạ ượ giao di n Abis s g i đ n BSC ẽ ở ế ệ
Sinh Sinh Viên :Nhóm 17- L p H09 VT1 ớ
16