ThiÕt kÕ bé ®iÒu khiÓn ph¶n håi ®Çu ra cho cÇu trôc
KS. trÞnh l−¬ng miªn
Bé m«n §iÒu khiÓn häc
Khoa §iÖn - §iÖn tö
Tr−êng §¹i häc Giao th«ng VËn t¶i
Tãm t¾t: Bμi b¸o ®−a ra m« h×nh to¸n cña hÖ cÇu trôc vμ kÕt qu¶ thiÕt kÕ bé ®iÒu khiÓn
ph¶n håi tr¹ng th¸i khi thªm thμnh phÇn tÝch ph©n nh»m tù ®éng ho¸ cÇu trôc ®¶m b¶o triÖt tiªu
sai lÖch tÜnh: vÞ trÝ xe vμ dao ®éng t¶i.
Summary: This paper puts forwards mathematical models of the bridge crane and results
of the state feedback controller with an additional integrator to operate the bridge crane
automatically, ensuring minimized position errors and swing of loads.
I. §Æt vÊn ®Ò
CÇu trôc lµ thiÕt bÞ c«ng nghiÖp ®−îc øng dông rÊt réng r·i trong nhiÒu lÜnh vùc nh− trong
x©y dùng, trong nhµ m¸y hay t¹i c¸c bÕn c¶ng, ... Nh÷ng cÇu trôc nµy th−êng ®iÒu khiÓn b»ng
tay. Khi mµ kÝch th−íc cña cÇu trôc trë nªn lín h¬n vµ yªu cÇu vËn chuyÓn nhanh h¬n th× qu¸
tr×nh ®iÒu khiÓn chóng sÏ trë nªn khã kh¨n nÕu kh«ng ®−îc tù ®éng ho¸. CÇu trôc di chuyÓn
theo nh÷ng quü ®¹o x¸c ®Þnh. Nh−ng nã ho¹t ®éng d−íi nh÷ng ®iÒu kiÖn hÕt søc kh¾c nghiÖt vµ
mét hÖ thèng ®iÒu khiÓn kÝn lµ thÝch hîp nhÊt.
CT 2
CÇu trôc lµ hÖ rÊt phøc t¹p. Trong suèt thêi gian qua ®· cã kh¸ nhiÒu c¸c nghiªn cøu [1-5]
vÒ cÇu trôc nh»m t×m ra ph−¬ng ph¸p vËn hµnh nã mét c¸ch hiÖu qu¶. Trong sè c¸c nghiªn cøu
®ã th× ph−¬ng ph¸p ®iÒu khiÓn cÇu trôc dùa vµo m« h×nh tuyÕn tÝnh ®· thu ®−îc mét vµi kÕt qu¶
kh¶ quan [6-7]. Tuy nhiªn, vÊn ®Ò tån t¹i lµ c¸c bé ®iÒu khiÓn ®−îc thiÕt kÕ ch−a triÖt tiªu ®−îc
sai lÖch tÜnh. Do vËy, b»ng c¸ch ®−a thªm kh©u tÝch ph©n vµo bé ®iÒu khiÓn ph¶n håi tr¹ng th¸i
sÏ ®¶m b¶o sai lÖch tÜnh cña hÖ thèng ®−îc triÖt tiªu hoµn toµn vµ chÊt l−îng ®iÒu khiÓn ®−îc
n©ng cao.
ii. M« h×nh to¸n hÖ cÇu trôc
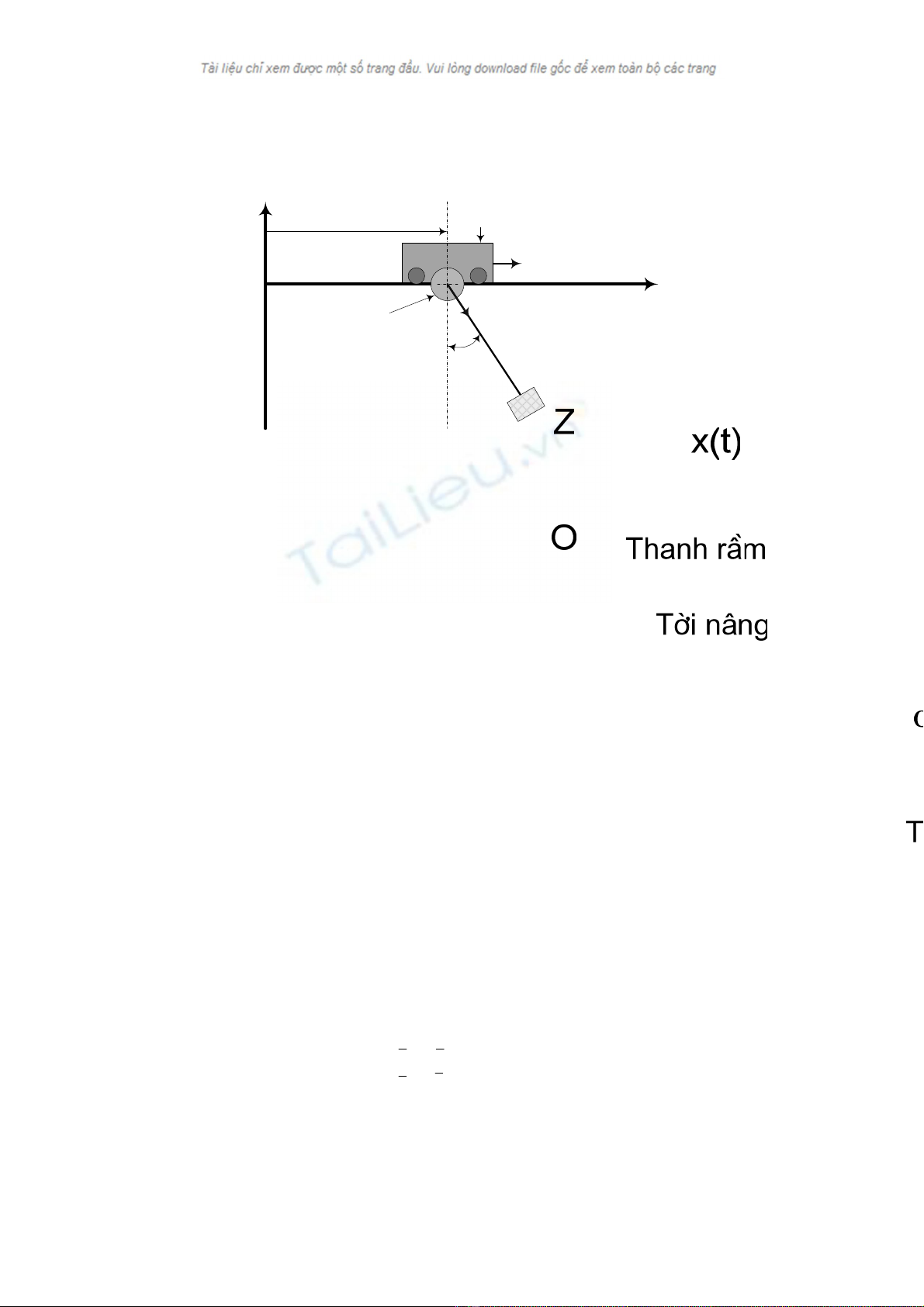
M« h×nh cÇu trôc víi hÖ to¹ ®é ®−îc chän nh− m« t¶ trªn h×nh 1. Trôc Ox n»m ngang däc
theo thanh dÇm, trôc Oz th¼ng ®øng cã chiÒu h−íng lªn trªn. Xe goßng di chuyÓn trªn thanh
dÇm víi vÞ trÝ ®−îc x¸c ®Þnh bëi x(t) lµ kho¶ng c¸ch ®o ®−îc tõ gèc O ®Õn ®iÓm treo cña c¸p
n©ng t¶i trªn xe. Coi t¶i nh− mét chÊt ®iÓm cã khèi l−îng mP, xe goßng cã khèi l−îng mt. T¶i
träng vµ xe goßng ®−îc nèi víi nhau b»ng mét c¸p cøng cã khèi l−îng kh«ng ®¸ng kÓ vµ cã
chiÒu dµi l, sù dµi ra cña d©y c¸p lµ kh«ng ®¸ng kÓ. Trong khi n©ng h¹ t¶i hay di chuyÓn xe th×
t¶i dao ®éng trong mÆt ph¼ng th¼ng ®øng víi gãc lÖch α(t). Fx lµ lùc chuyÓn ®éng xe goßng theo