
CH NG 1. ƯƠ C U T O C C U-CẤ Ạ Ơ Ấ AÙC
KHAÙI NIEÄM CÔ BAÛN
Đ I H C CÔNG NGHI P TP.H CHÍ MINH Ạ Ọ Ệ Ồ KHOA C KHÍƠ
NGUYÊN LÝ MÁY
NGUYÊN LÝ MÁY
1. Chi tiết m
1. Chi tiết má
áy v
y và
à khâu
khâu
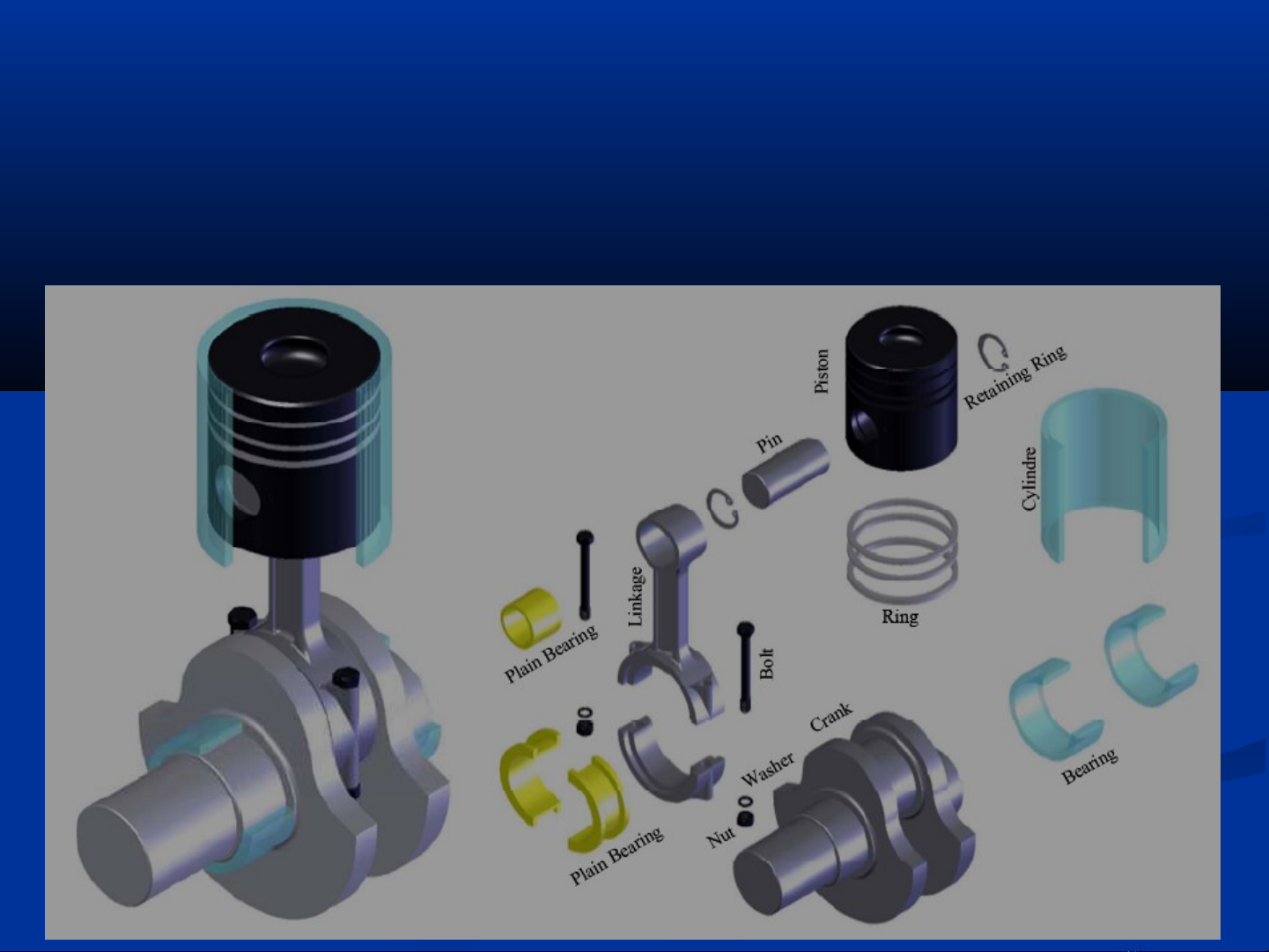
Chi tiết máy
Chi tiết máy (part): máy hay cơ cấu có thể tháo rời ra thành nhiều
(part): máy hay cơ cấu có thể tháo rời ra thành nhiều
bộ phận khác nhau, bộ phận không thể tháo rời ra được nữa gọi là chi
bộ phận khác nhau, bộ phận không thể tháo rời ra được nữa gọi là chi
tiết máy.
tiết máy.
§1. Định nghĩa và khái niệm cơ bản
§1. Định nghĩa và khái niệm cơ bản
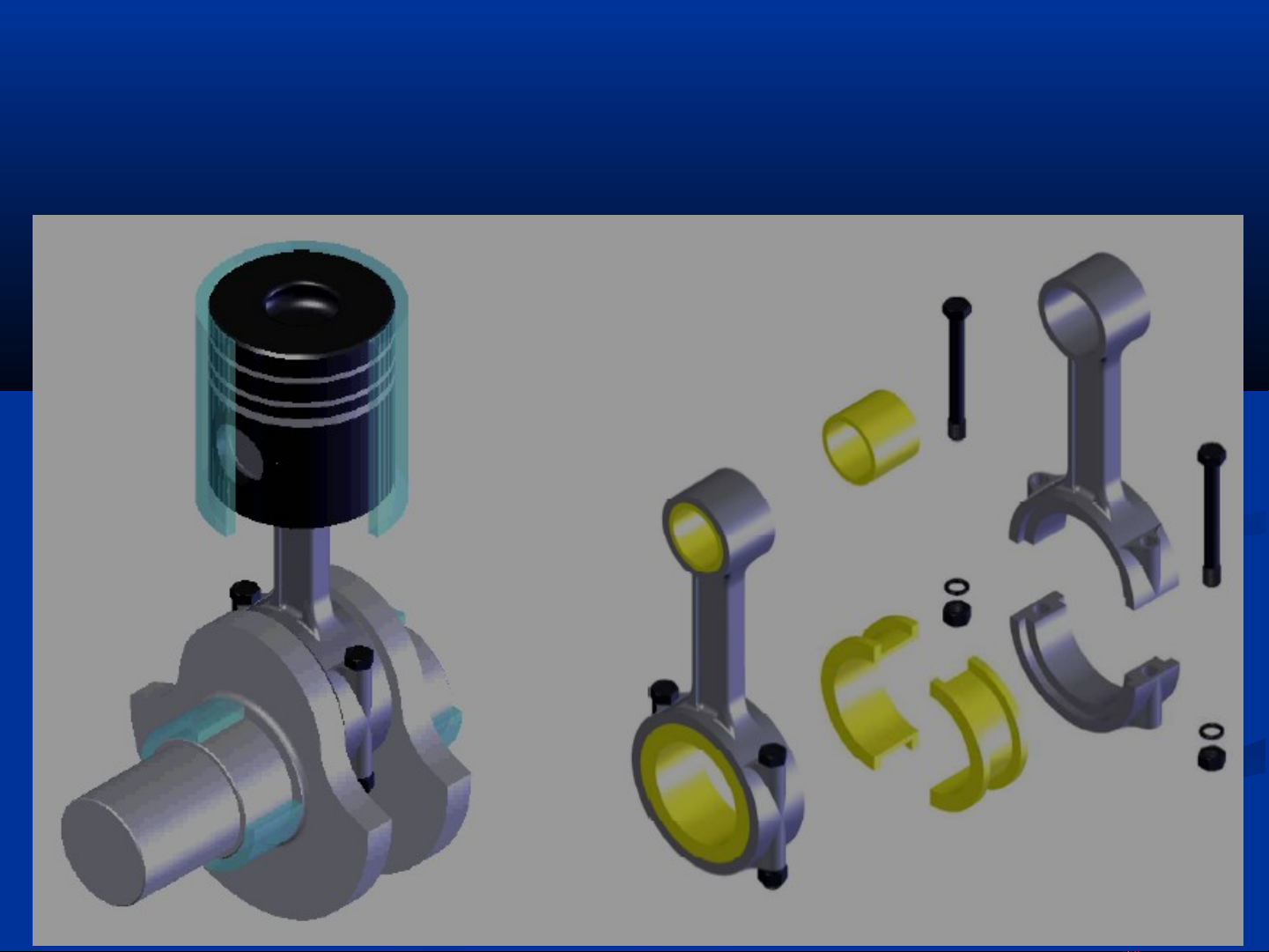
Khâu (link)
Khâu (link): trong cơ cấu và máy, tòan bộ những bộ phận có chuyển
: trong cơ cấu và máy, tòan bộ những bộ phận có chuyển
động tương đối so với bộ phận khác gọi là khâu.
động tương đối so với bộ phận khác gọi là khâu.
§1. Định nghĩa và khái niệm cơ bản
§1. Định nghĩa và khái niệm cơ bản
2. Thành phần khớp động và khớp động
2. Thành phần khớp động và khớp động
§1. Định nghĩa và khái niệm cơ bản
§1. Định nghĩa và khái niệm cơ bản
-
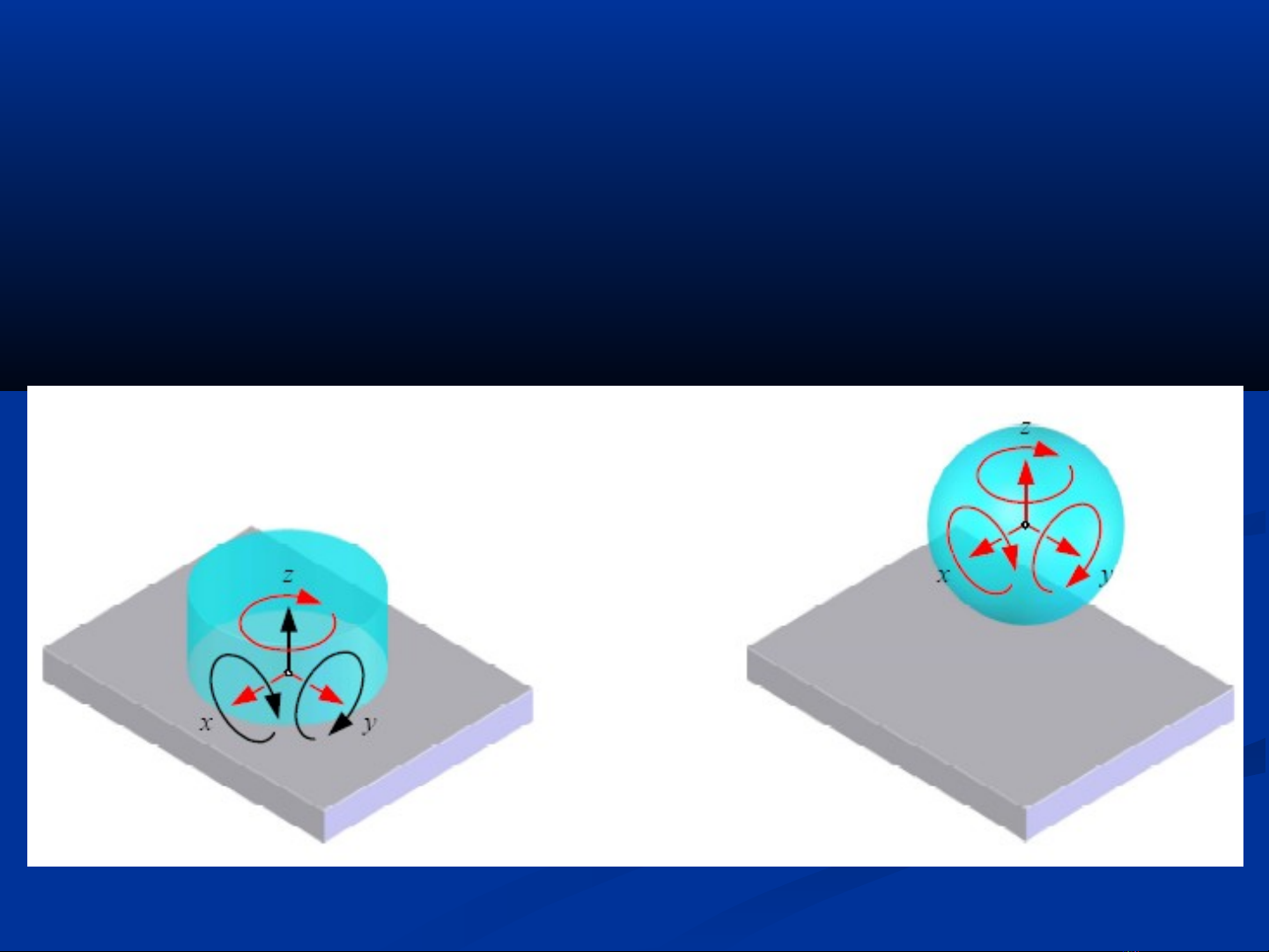
- Bậc tự do (DOF) của khâu
Bậc tự do (DOF) của khâu
+ Một khả năng chuyển động độc lập đối với một hệ qui chiếu
+ Một khả năng chuyển động độc lập đối với một hệ qui chiếu
1 btd
1 btd
+ Giữa hai khâu trong mặt phẳng
+ Giữa hai khâu trong mặt phẳng
3 btd:
3 btd: Tx, Ty
Tx, Ty,
, Qz
Qz
+ Giữa hai khâu trong không gian
+ Giữa hai khâu trong không gian
6 btd:
6 btd: Tx, Ty, Tz
Tx, Ty, Tz,
, Qx, Qy, Qz
Qx, Qy, Qz

2. Thành phần khớp động (pair) và khớp động (joint)
2. Thành phần khớp động (pair) và khớp động (joint)
§1. Định nghĩa và khái niệm cơ bản
§1. Định nghĩa và khái niệm cơ bản
- Nối động (joint): để tạo thành cơ cấu, các khâu không thể rời nhau
- Nối động (joint): để tạo thành cơ cấu, các khâu không thể rời nhau
mà phải được liên kết với nhau theo một qui cách xác định nào đó,
mà phải được liên kết với nhau theo một qui cách xác định nào đó,
sao cho khi nối với nhau các khâu vẫn còn khả năng chuyển động
sao cho khi nối với nhau các khâu vẫn còn khả năng chuyển động
tương đối
tương đối
nối động các khâu
nối động các khâu
![Đề cương bài giảng Nguyên lý động cơ [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/kimphuong1001/135x160/75891752564030.jpg)




![Bài giảng Nguyên lý máy: Chương 5 - Đại học Xây dựng Hà Nội [FULL]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250423/echdada123/135x160/2892319_5577.jpg)

![Bài tập tối ưu trong gia công cắt gọt [kèm lời giải chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251129/dinhd8055/135x160/26351764558606.jpg)














