1
CHƯƠNG 3
ĐỘNG LỰC HỌC CƠ CẤU
TS. PHẠM HUY HOÀNG
Chương 3:
Động lực họccơ cấu
I. Mở đầu:
1.Phân lọai lực:
a. Ngọai lực: Lực phát động; Lực cản kỹthuật (lực
cản có ích); Lực ma sát do môi trường; Trọng lực
các khâu; Lực quán tính - Ngọai lực “giả”.
b. Nội lực: Áp lực khớpđộng; Lực ma sát trong
khớp.
2
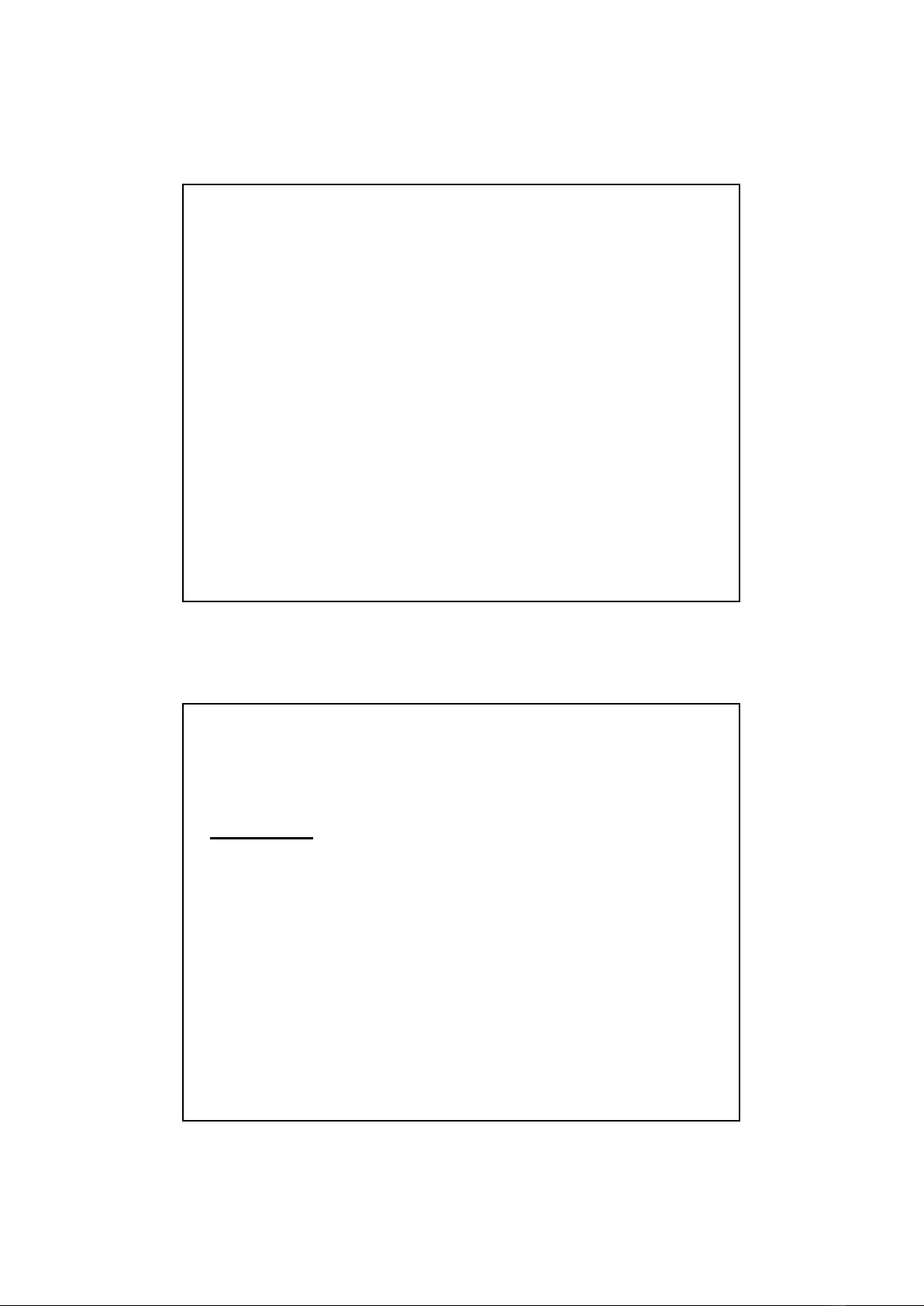
* Lực quán tính - Ngọai lực “giả”:
ii
J
i
qt
M
i
S
a
i
m
i
qt
F
e
-=-= ;
r
r
0;0 =++
å
=+
åi
qt
M
i
F
M
i
i
M
i
qt
F
i
i
F
r
r
r
ii
J
i
i
F
M
i
i
M
i
S
a
i
m
i
i
F
e
=
åå +=
å
r
r
r
;
iSi
i
qt
F
r
1
F
r
2
F
r
4
F
r
3
F
r
1
M
2
M
i
qt
M
iSi
i
S
a
r
1
F
r
2
F
r
4
F
r
3
F
r
1
M
2
M
i
e
Lực quán tính:
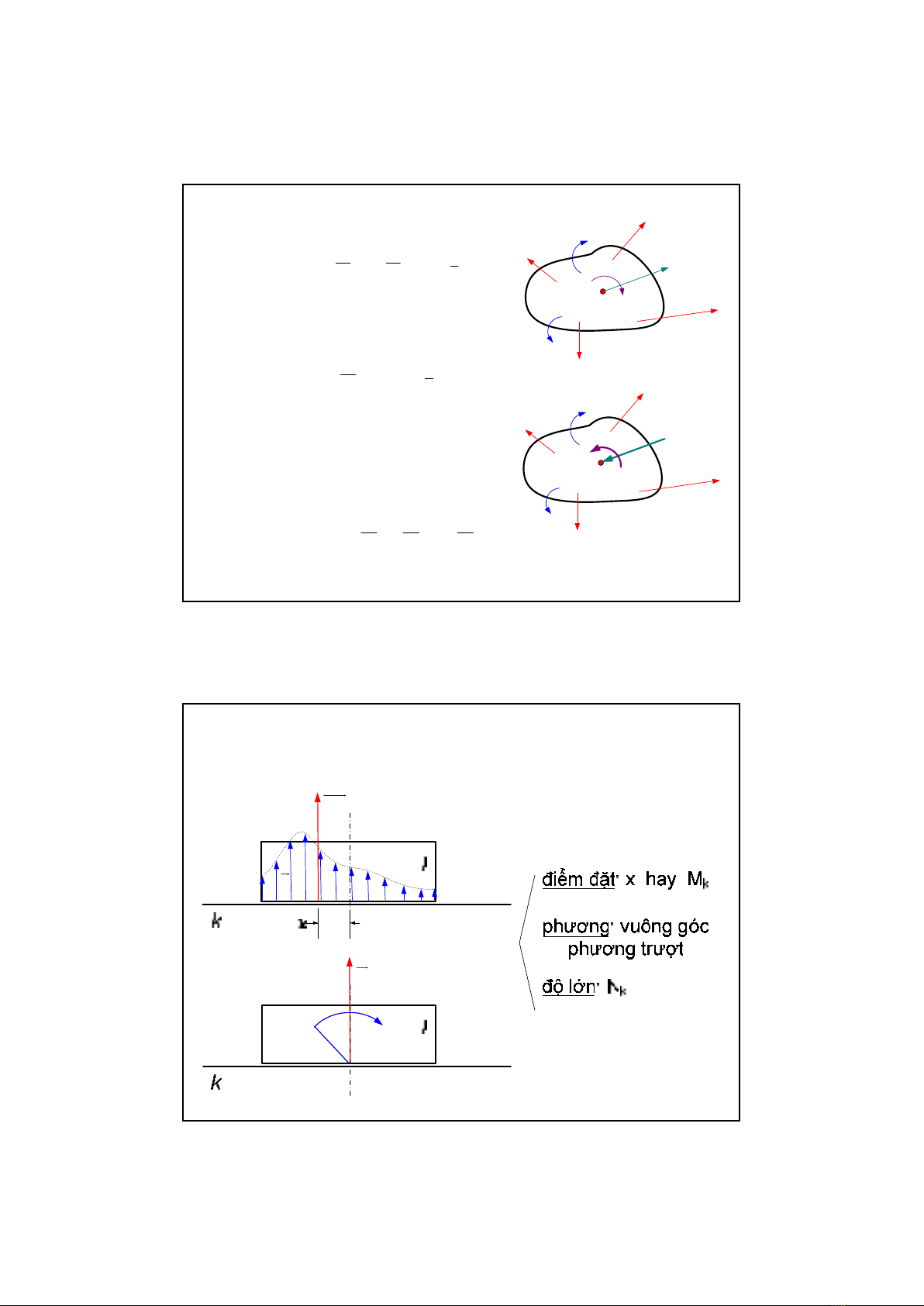
2. Áp lực tại các khợp phẳng thường gặp:
a. Khớp tịnh tiến lọai 5: 2 ẩn số-độ lớn và điểmđặt
p
kj
N
=
kj
N
r
kj
N
kj
M
kj
Nx
kj
M.
=
3
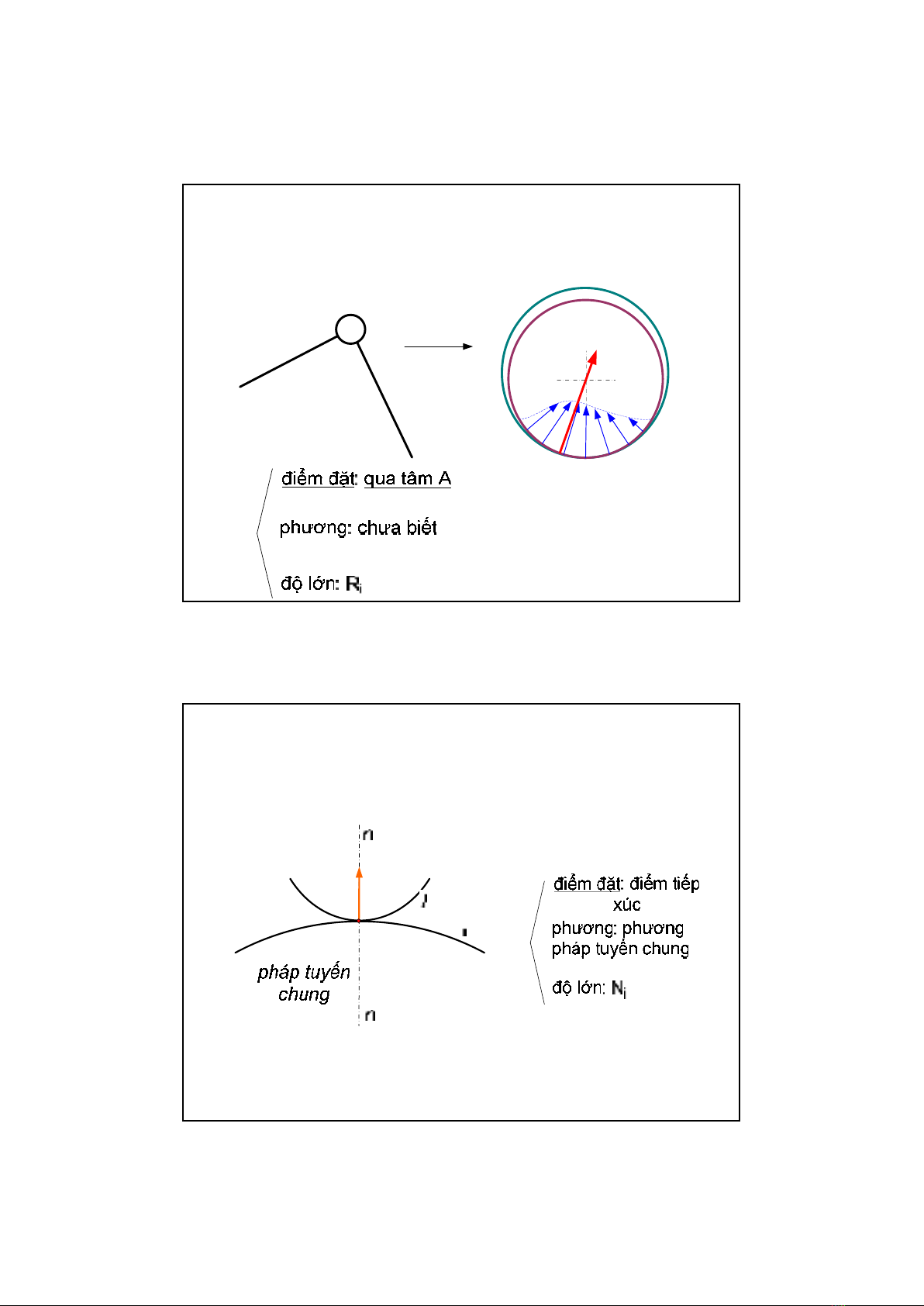
2. Áp lực tại các khợp phẳng thường gặp:
b. Khớp bản lề: 2 ẩn số-độ lớn và phương
i
j
Alót ổ i
ngõng trục j
A
ij
R
r
p
r
=
ij
R
r
2. Áp lực tại các khợp phẳng thường gặp:
c. Khớp lọai 4: 1 ẩn số-độ lớn áp lưc
ij
N
r
=
ij
N
r
4
3. Nhóm tĩnh định / Nhóm Axua:
Nhóm tĩnh định: có thểgiải bài tóan lực-số ẩn bằng số
phương trình
Nhóm Axua: bậc tựdo bằng 0
Xét nhóm các khâu phẳng có: n khâu động, p4khớp lọai 4 và
p5khớp lọai 5
Bài toán lực: số phương trình 3n, số ẩn (p4+2 p5)
Bậc tựdo: 3n - (p4+2 p5)
Điều kiện tĩnh định Ξ Điều kiện Axua: 3n - (p4+2 p5) = 0
3. Nhóm tĩnh định / Nhóm Axua:
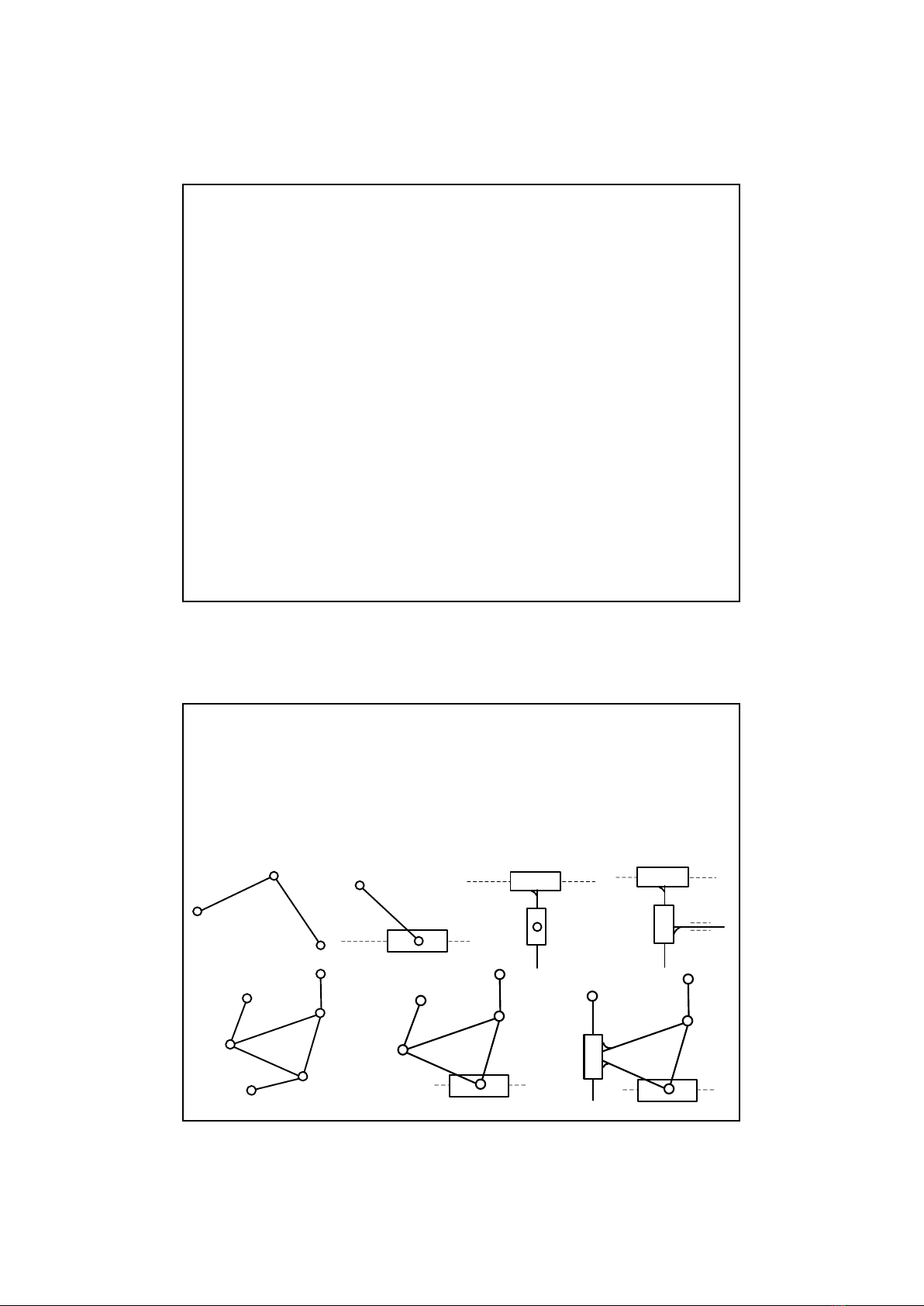
Nhóm phẳng toàn khớp thấp: n khâu động và p5 khớp lọai 5
Điều kiện tĩnh định Ξ Điều kiện Axua: 3n - 2 p5 = 0
→Nhóm {2 khâu 3 khớp}, {4 khâu 6 khớp}, {6 khâu 9 khớp},
5
4. Giải bài toán lực bằng phương pháp phân tích lực:
a. Giải các bài toán vịtrí, vận tốc và gia tốc, để có sốliệu về
các lực quán tính trên mỗi khâu.
b. Xác định các lựcđã biết và chưa biết, xác định lực cân
bằng ởdạng nào (lực hay moment) và tác động trên khâu
nào.
Lực cần bằng: ngọai lựcchưa biết cân bằng tất cảcác ngọai
lực còn lại.
c. Tách cơ cấu thành các nhóm tĩnh định và đặt các áp lực
khớpđộng lên các thành phần khớpđộng có lưu ý tới sự
bằng nhau về độ lớn và ngược chiều nhau cuảlực và
phản lực tại các khớp (định luật III Newton).
4. Giải bài toán lực bằng phương pháp phân tích lực:
d. Giải bài toán lực (tìm áp lực tại các khớpđộng) cho các
nhóm theo thứtự“từxa vềgần”:
- Giải cho nhóm ởxa hơn (ởnhóm chứa các lựcđã biết),
lấy kết quảtìm được làm dữliệu (coi như lựcđã biết) của
nhóm kếtiếp và gầnhơn.
- Công việc trên được lầnlượt thực hiện cho tới khi chỉcòn
lại khâu dẫn.
e. Giải bài toán lực cho khâu dẫn (tính áp lực khớpđộng tại
khớp nối khâu dẫn với giá và lực cân bằng).















![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)