CNTT-DHBK Hanoi
hunglt@it-hut.edu.vn
1
Khoa CNTT DHBK Hanoi
1
Đường cong trong không gian
3D CURVE
Khoa CNTT DHBK Hanoi
2
Đường cong - Curve
Why use curves? Quỹ đạo chuyển động của 1 điểm trong không gian
Điểm biểu diễnĐường cong -curve represents points:
–là phương pháp được sử dụng trong khoa học vật lý và kỹ nghệ nói
chung.
–Các điểm dữ liệu được đo chính xác trên các thực thể sẽ chính đối
tượng cơ sở. Đường cong đi qua các điểm dữ liệu hiển thị hỗ trợ cho
việc nhận ra xu hướng và ý nghĩa cả các điểm dữ liệu.
–Các kỹ thuật phức tạp “vd bình phương sai số” được dùng đưa đường
cong hợp với 1 dạng toán học cơ bản.
Biểu diễn Điểmvà kiểm soát đường cong -Points represent-and
control-the curve.
–đường cong là các đối tượng cơ bản thường là kết quả của tiến trình
thiết kế và các điểm đóng vai trò là công cụ để kiểm soát và và mô hình
hoá đường cong.
–Cách tiếp cận này là cơ sở của lĩnh vực Computer Aided Geometric
Design (CAGD).
Khoa CNTT DHBK Hanoi
3
Phân loại
Trên cơ sở ràng buộc giữa điểm và đường trong cả ứng dụng khoa
học và thiết kế ta co thể phân làm 2 loại:
Nội suy-Interpolation - đường cong đi qua các điểm, trong ứng
dụng khoa học các yêu cầu về ràng buộc sử dụng đa thức hay các
hàm bậc cao tuy nhiên kết quả thường có những hiệu ứng phụ như
sai số phóng đại hay độ nhấp nhô của đường cong do đa thức bậc
cao tạo nên.
Trong thiết kế nôi suy là cần thiết với các đối tượng nhưng không
phù hợp với các đối tượng có hình dáng bất kỳ "free form“.
Xấp xỉ-Approximation - đường cong không cần đi qua các điểm,với
các ứng dụng khoa học ta gọi là trung bình dữ liệu- data averaging
hay trong thiết kế điểu khiển đường cong.
Khoa CNTT DHBK Hanoi
4
Polynomial Parametric Curves
What degree should we use to represent a
curve?
–We choose the third degree:
Cubic polynomials
–Higher degrees:
Require more computation
Have extra “wiggles”
Provide more flexibility than is required.
Are often used to model cars and aeroplanes
Khoa CNTT DHBK Hanoi
5
Tính chất cả đường cong bậc 3
Tham biến – parametric sử dụng tham biến ngoài để biểu diễn cho
các tham biến trong
Độ mượt - smooth. Với đường cong Hermite and Bézier tính liên
tục continuity của đường cong hay đạo hàm bậc 1-first derivative tại
các điểm kiểm soát-control point. Với B-splines tính liên tục trên đạo
hàm bậc 2 second derivative hay độ cong được đảm bảo curvature.
Độ biến đổi -"variation diminishing." đường cong ít bị khuếch đại
sai số bởi các điểm kiểm soát hay tính nhấp nhô của đường cong
hạn chế -oscillate.
Ví dụ Bézier curve, for instance, lies within the convex hull (polygon
envelope) of the set of control points.
Điêm kiểm soát cục bộ-local control. đường cong bị ảnh hưởng
mạnh nhất với chính các điểm kiểm soát gần chúng nhất.
Khoa CNTT DHBK Hanoi
6
Đường cong đa thức bậc ba
Phảiđảmbảolàđường cong không gian với3 trụctoạ
độ x, y, z
tránh đượcnhững tính toán phứctạpvànhững phần
nhấp nhô ngoài ý muốnxuấthiệnởnhững đường đa
thứcbậccao
Why cubic?
–lower-degree polynomials give too little flexibility in controlling the
shape of the curve
–higher-degree polynomials can introduce unwanted wiggles and
require more computation
–lowest degree that allows specification of endpoints and their
derivatives
–lowest degree that is not planar in 3D
CNTT-DHBK Hanoi
hunglt@it-hut.edu.vn
2
Khoa CNTT DHBK Hanoi
7
Kinds of continuity:
–G0: two curve segments join together
–G1: directions of tangents are equal at the joint
–C1: directions and magnitudes of tangents are equal
at the joint
–Cn: directions and magnitudes of n-th derivative are
equal at the joint
Khoa CNTT DHBK Hanoi
8
P0
P1 p2
p3
P0
P'0 P1
P'1
Đường cong bậc3
Theo Lagrange:
x= a1+ b1u+ c1u2+ d1u3
y= a2+ b2u+ c2u2+ d2u3
z= a3+ b3u+ c3u2+ d3u3
3 phương trinh với12 ẩnsố
Với3 điểmP0, P1, P2, P3 phương trình xác định
Khoa CNTT DHBK Hanoi
9
Đường cong Hermite
Phương pháp Hermite dựa trên cơ sởcủa cách biểu diễn
Ferguson hay Coons năm 60
đường bậc ba sẽxác định bởi hai điểm đầu vàcuối cùng với hai góc
nghiêng tại hai điểm đó
p = p(u) = k0+ k1u + k2u2+ k3u3
p(u) = ∑kiui i∈n
p’= p(u) = k1+ 2k2u + 3k3u2
p0 vàp1ta có hai độdốc p0’vàp1’với u = 0 vàu = 1 tại hai điểm đầu
cuối của đoạn [0,1].
k1+ 2k2+ 3k3= p1’
k0= p0k1= p1’
k2= 3(p1–p0) - 2p0’–p1’
k3= 2(p0-p1) + p0’+ p1’Khoa CNTT DHBK Hanoi
10
Thay vào:
p= p(u) = p0(1-3u2+2u3) + p1(3u2-2u3)
+ p0’(u-2u2+u3) + p1’(-u2+u3)
p = p(u) = [ 1 u u2 u3]
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−−−
1
0
1
0
1122
1233
0100
0001
'
'
.
p
p
p
p
Khoa CNTT DHBK Hanoi
11 Khoa CNTT DHBK Hanoi
12
Đường cong Bezier
Sửdụng điểm và các vector kiểmsoátđượcđộdốc
củađường cong tạinhưng điểmmànóđi
qua.(Hermit)
không đượcthuậnlợichoviệcthiếtkếtương tác,
không tiếpcậnvàocácđộdốccủađường cong
bằng các giá trịsố(Hermite).
Paul Bezier,RENAULT, 1970 đường và bềmặt
UNISURF
CNTT-DHBK Hanoi
hunglt@it-hut.edu.vn
3
Khoa CNTT DHBK Hanoi
13
po, p3 tương đương với p0, p1 trên đường Hermite.
diểm trung gian p1, p2 được xác định bằng 1/3 theo
độdài của vector tiếp tuyến tại điểm po và p3
p0’= 3(p
1–p
0)
p3’= 3(p
3–p
2)
p = p(u) = p0(1-3u2+2u3) + p1(3u2-2u3) + p0’(u-
2u2+u3) + p1’(-u2+ u3)
p = p(u) = p0(1 - 3u + 3u2-u
3) + p1(3u-6u2+3u3)
+ p2(3u2-3u
3) + p3u3
Khoa CNTT DHBK Hanoi
14
p = p(u) = [ 1 u u2u3]
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−−
−
−
3
2
1
0
1331
0363
0033
0001
p
p
p
p
Khoa CNTT DHBK Hanoi
15
Ưuđiểm
dễdàng kiểm soát hi`nh dạng của đường cong hơn
vector tiếp tuyến tại p0’vàp1’của Hermite.
Nằm trong đa giác kiểm soát với số điểm trung gian
tuỳý( sốbậc tuỳ ý)
đi qua điểm đầu và điểm cuối của đa giác kiểm soát,
tiếp xúc với cặp hai vector của đầu cuối đó
Khoa CNTT DHBK Hanoi
16
De Casteljau algorithm
Khoa CNTT DHBK Hanoi
17
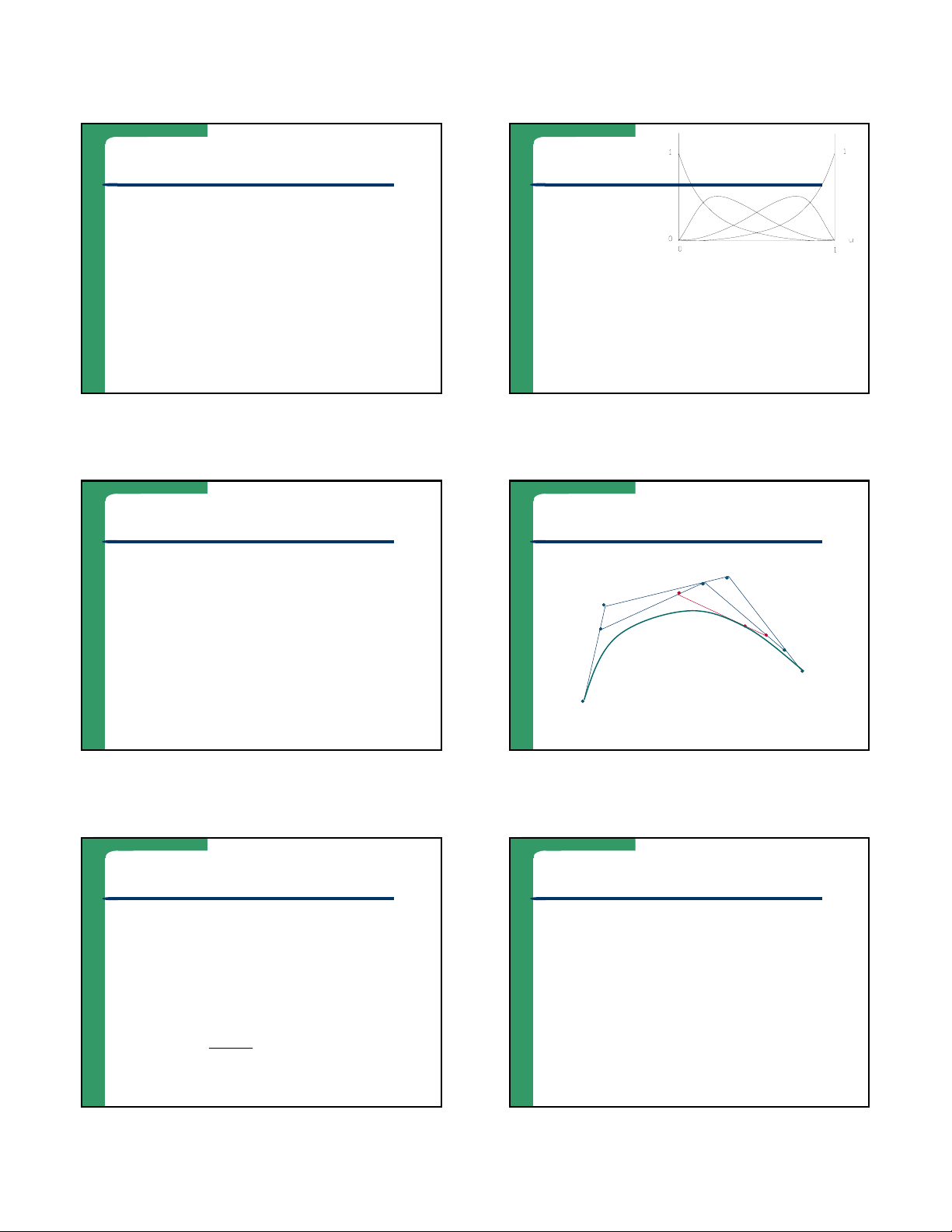
BiểuthứcBezier-Bernstain
Tổng quát hoá vớin+1 điểmkiểm soát
p0... pn : vector vịtrí củađagiácn+1 đỉnh
))(()(
)()(
1
0
1,
0
,
ii
n
i
ni
i
n
i
ni
PpuBnup
puBup
−=
′
=
+
=
−
=
∑
∑
ini
ni uuinCuB −
−= )1(),()(
,
)!in(!i
!n
)i,n(C −
=
Khoa CNTT DHBK Hanoi
18
Tính chất
P0 và Pn nằm trên đường cong.
Đường cong liên tục và có đạo hàm liên tục tất cả các
bậc
Tiếp tuyến của đường cong tại điểm P0 là đường P0P1
và tại Pn là đường Pn-1Pn .
Đường cong nằm trong đường bao lồi convex hull của
các điểm kiểm soát.
This is because each successive Pi(j) is a convex
combination of the points Pi(j-1) and Pi-1(j-1) .
P1 ,P2 , … ,Pn-1 nằm trên đường cong khi và chỉ khi
đường cong là đoạn thẳng.
CNTT-DHBK Hanoi
hunglt@it-hut.edu.vn
4
Khoa CNTT DHBK Hanoi
19
Review:
Bézier Curve Prop’s [1/6]
We looked at some properties of Bézier curves.
Generally “Good” Properties
–Endpoint Interpolation
–Smooth Joining
–Affine Invariance
–Convex-Hull Property
Generally “Bad” Properties
–Not Interpolating
–No Local Control
Khoa CNTT DHBK Hanoi
20
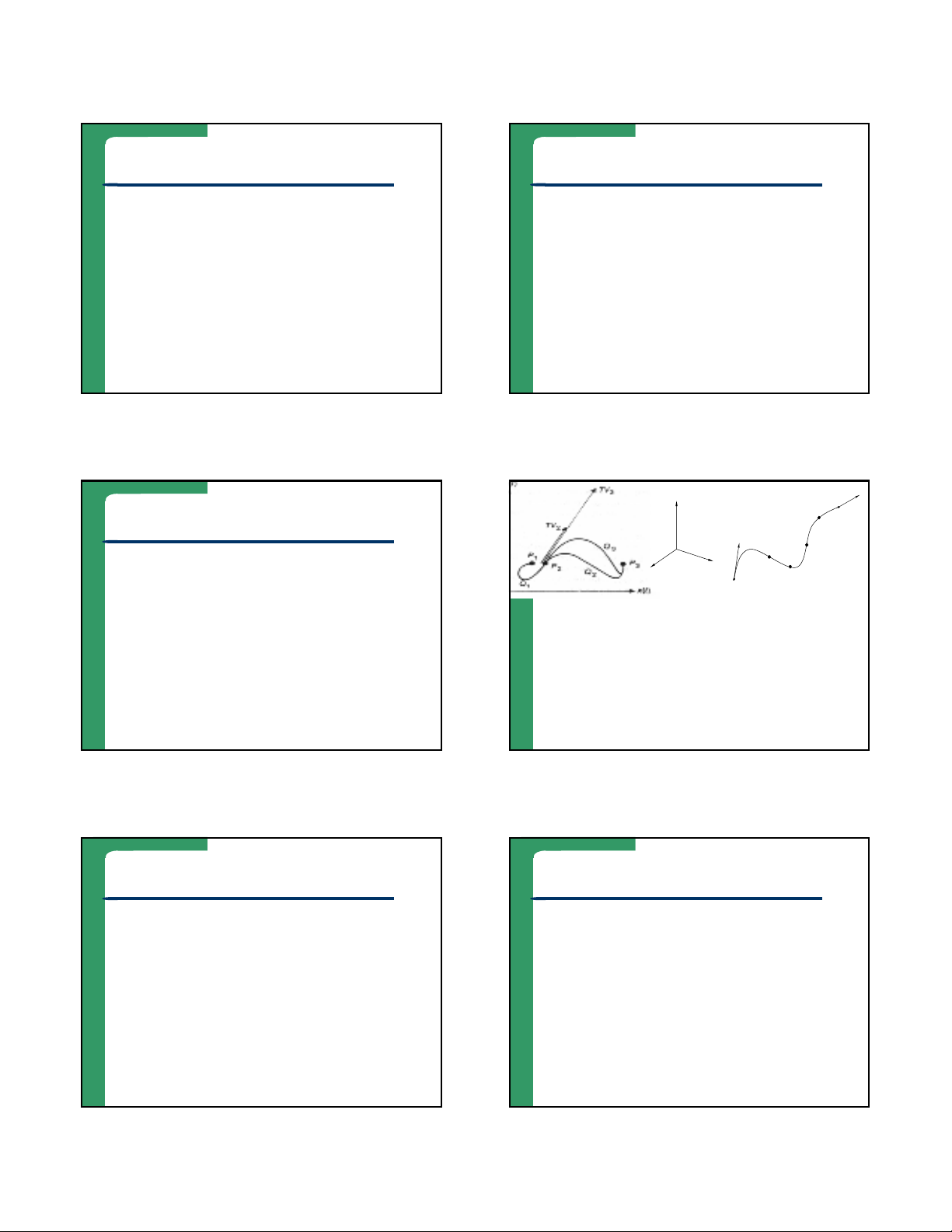
Đường bậcbaSpline
Spline đi qua n điểm cho trước màmỗi đoạn là
đường bậc ba độc lập có độdốc và độcong liên
tục tại mỗi điểm kiểm soát hay điểm nút
Với n điểm:n-1 đoạn với mỗi đoạn 4 vector hệsố
4(n-1) cho n-1 đoạn, và 2(n-1) điều kiện biên và n-
2 điều kiện về độdốc cùng n-2 về độcong
Spline dùng đểchỉ phương pháp biểu diễn
đường cong mềm thông qua các đoạn cong tham
biến bậc ba với các điều kiện liên tục tại các điểm
đầu nút
Khoa CNTT DHBK Hanoi
21
Đường cong bậcba
Spline
u0= 0 với: (u0... un-1)uj+1 > uj
ui+1 = ui + di+1
C0đểkhông có sựgián đoạngiữa hai đoạn cong.
C1tính liên tụcbậcnhất hay đạohàmbậcnhấttạiđiểm
nối.
C2đạo hàm bậc hai liên tụccủađường cong tạiđiểmnối
Khoa CNTT DHBK Hanoi
22
tính liên tụccủađạohàmbậchaitạicácđiểmnốicóthểdễ
dàng đạtđượcbằng cách đặtP’’i
-1(ui-1=1) là đạohàmbậchai
tạiđiểmcuốicủađoạn(i-1) bằng với P’’i(ui=0) đạohàmbậc
hai tạiđiểmđầucủađoạnthứi.
P’’i-1(1)= P’’i(0)
y Pn-1’
Pn-1
Po’P1
x z Po
p = [ 1 u u2 u3]
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−−−
1
0
1
0
1122
1233
0100
0001
'
'
.
p
p
p
p
Khoa CNTT DHBK Hanoi
23
Đường cong B-spline
Đường cong B-spline là đường cong được sinh
ra từ đa giác kiểm soát mà bậc của nó không phụ
thuộc vào số đỉnh của đa giác kiểm soát.
Khoa CNTT DHBK Hanoi
24
B-Splines:
The Idea [1/2]
The repeated-lirping idea that produced the Bézier
curves has the drawbacks that is produces polynomials
with high degree that are nonzero almost everywhere.
–Using functions defined in pieces, we can fix these two.
Start: An order-1 B-Spline has blending functions that are
always either 1 or 0. When a function is 1, all the rest are
zero.
–So an order-1 B-spline is just a sequence of points.
–Any number of control points may be used.
Now we make higher-order B-splines using a repeated-
lirping procedure.
–But this time, we can use any number of control points.
CNTT-DHBK Hanoi
hunglt@it-hut.edu.vn
5
Khoa CNTT DHBK Hanoi
25
B-Splines:
The Idea [2/2]
We form an order-2 B-Spline by lirping between the order-1 blending
functions.
–As discussed, we get functions that start at 0, ramp up to 1 and back
down, then stay at zero. Each function is 0 most of the time.
–So each blending function is defined in pieces. Each piece is a
polynomial of degree 1 (graph is a line).
–So an order-2 B-spline is just the control polygon.
–Again, any number of control points may be used.
We form an order-3 B-Spline by lirping between the order-2 blending
functions.
–Now blending functions are smooth. They start at 0, curve up to 1 then
back down. Again, each function is 0 most of the time.
–Again, each blending function is defined in pieces. Each piece is a
polynomial of degree 2.
We continue this repeated-lirping procedure to define B-splines of
higher order.
–See the blue book for details and graphs. Khoa CNTT DHBK Hanoi
26
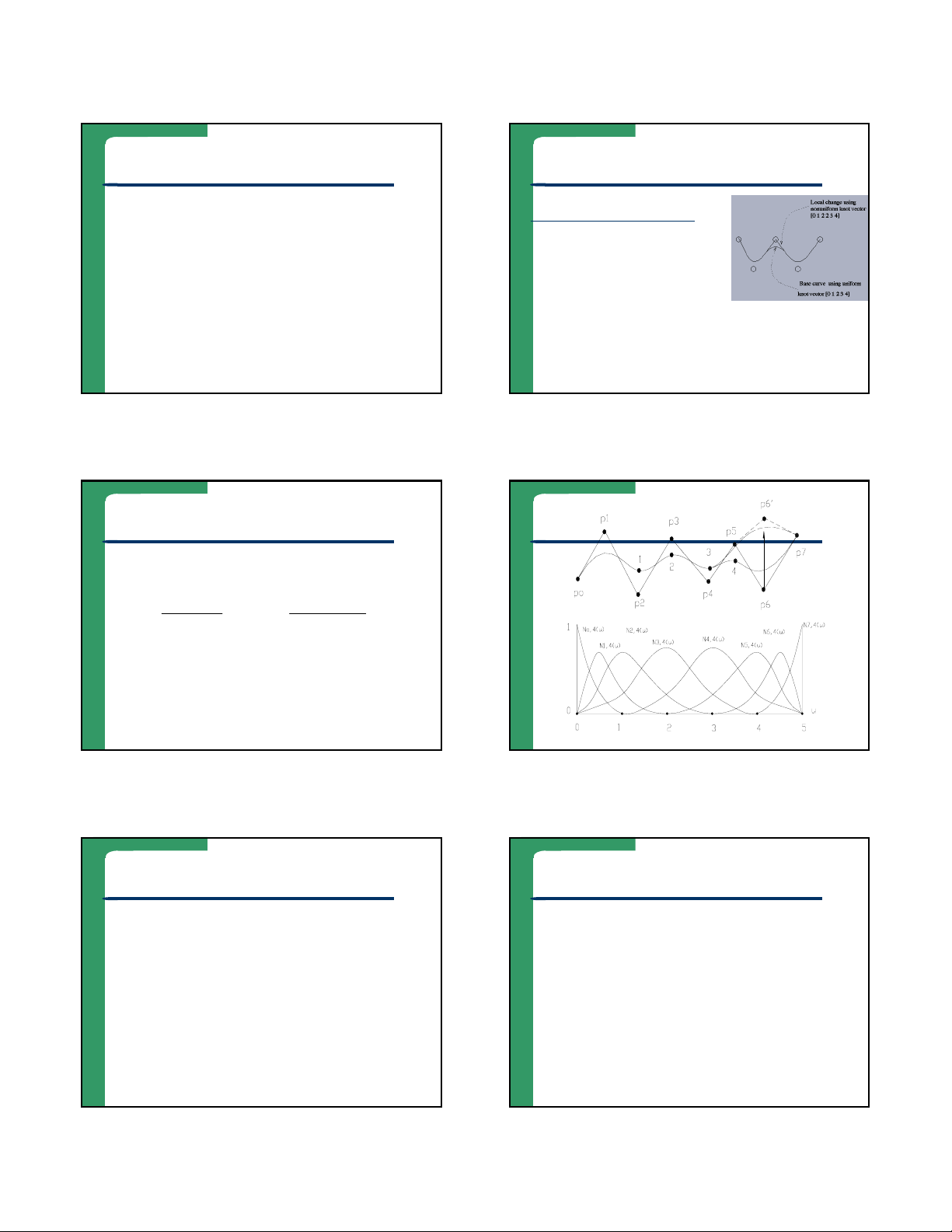
Types of B-Splines Approximation Curves Used
B-Spline approximations can be classified based on the
spacing of the knot vector and the use of weights.
1. Uniform/Periodic B-splines : The spacing is
unform and the knots (control points) are equispaced e.g.
[0,1,2,3,4,5] These have satisfactory smoothness but lack
local control and the starting and ending poits are ill
defined as above.
2. Non-periodic: The knots are repeated at the ends m
times and the interior is equispaced. e.g. [0 0 0 1 2 3 3 3
] These can be used to force the control point to start
and finish at a control point.
3. Non-uniform B-Splines : The spacing is non-
uniform and or repeated knots e.g. [0 1124566
]These can be used to obtain local control
B-Splines
Khoa CNTT DHBK Hanoi
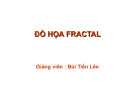
27
B-spline
Ni,k(u) đa thức B-Spline cơ bản
Vớin+ 1 sô điểmkiểm soát
Pi điểm kiểm soát thứ i
k bậc của đường cong 1<k<n+2
Ui vector nút của đường cong
U=
[
U1
,
U2...Un+k+1
]
i
n
i
ki PuNuP ∑
=
=
0
,).()(
)(
)(
)(
)(
)(
)( 1,
21
1
1,1
1
1
,uN
UU
uU
uN
UU
Uu
uN ki
kii
i
ki
kii
ki
ki −
−++
+
−−
−+
−+
−
−
+
−
−
=
⎩
⎨
⎧∈
=+
others0
],[1
)( 1
1,
ii
i
uuu
uN
Khoa CNTT DHBK Hanoi
28
Khoa CNTT DHBK Hanoi
29
Đặcđiểm
B-spline không đi qua hai điểm đầu vàcuối trừkhi hàm hợp được
dùng làtuyến tính.
B-spline cóthể được tạo qua hai điểm đầu, cuối vàtiếp xúc với vector
đầu vàcuối của đa giác kiểm soát. Bằng cách thêm vào các nút tại vịtrí
của các nút cuối của vector tuy nhiên các giátrịgiống nhau không
nhiều hơn bậc của đường cong.
Tính chất bao lồi của đa giác kiểm soát vàtính chất chuẩn được thoa
mãn.
Số lượng các nút, bậc của đường cong vàsố điểm điều khiển luôn có
các quan hệràng buộc:
0 ≤u ≤n - k + 2
1(u)N
n
0i
ki, =
∑
=
Khoa CNTT DHBK Hanoi
30
B Spline -Đềuvàtuầnhoàn
Vecto nút là đều khi giá trị của chúng cách đều nhau một
khoảng ∇xác định. Trong các bài toán thực tế, vecto nút
đều được bắt đầu từ 0 và tăng 1 cho đến giá trị lớn nhất
Ví dụ: [ 0 1 2 3 4 5 ] với∇xác định = 1
[ -2 -1/2 1 5/2 4 ] với∇xác định = 3/2
Với cấp là k, số điểm kiểm soát là n+1 thì vecto nút đều là
U=[0 1 2 ...n+k] khoảng tham số (k-1)≤u≤(n+1).
Khi vecto nút là đều thì ta có Ni,k(u)=Ni-1,k(u-
1)=Ni+1,k(u+1)


![Bài giảng Đồ hoạ kỹ thuật 1: Phần 1 - Trường ĐH Thuỷ Lợi [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2023/20230131/baphap06/135x160/672431589.jpg)


![Bài giảng Lập trình trực quan: Tổng hợp kiến thức [Năm]](https://cdn.tailieu.vn/images/document/thumbnail/2022/20221025/minhtam37847/135x160/684443159.jpg)





![Bài giảng Tin học đại cương Trường Đại học Lâm Nghiệp [Năm mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/85781779160272.jpg)
![Giáo trình Cấu trúc dữ liệu và giải thuật - TS. Đào Thị Hường [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/49281779160273.jpg)





![Câu hỏi ôn tập Đồ hoạ máy tính [năm/khóa/chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/48771779155952.jpg)





%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)