
SO SÁNH CẤU TRÚC PROTEIN SỬ DỤNG MÔ HÌNH TỔNG QUÁT
Văn Đình Vỹ Phương1, Phan Mạnh Thường1 , Trần Văn Lăng2
(1) Khoa Công nghệ thông tin, Trường Đại học Lạc Hồng
(2) Viện Cơ học và Tin học ứng dụng, VAST
{phuong,thuong}@lhu.edu.vn, tvlang@vast-hcm.ac.vn
Tóm tắt. Bài viết trình bày phương pháp so sánh hai cấu trúc protein. Thực hiện xếp chồng và
rút ngắn khoảng cách giữa nguyên tử Carbon-
α
của các phần tử hai protein để tìm ra được mô
hình tương đồng cao nhất của hai protein. Nguồn protein thực hiện trong phương pháp được lấy
từ ngân hàng protein thế giới - Protein Data Bank (PDB). Mặc dù có nhiều phương pháp thực
hiện so sánh cấu trúc, nhưng vẫn còn nhiều vấn đề cần nghiên cứu và mở rộng. Phương pháp
được trình bày trong bài báo được mở rộng từ phương pháp Chimera. Phương pháp đưa ra
được kết quả tối ưu hơn so với cách sắp xếp chồng đơn thuần. Tính toán sự trùng khớp từ việc
xếp hàng cấu trúc, rút ngắn khoảng cách hai cấu trúc và tiến hành dịch chuyển, giúp cho việc
thể hiện sự tương đồng của protein một cách chính xác hơn. Tuy nhiên, vẫn còn một số hạn chế
gặp phải và chưa giải quyết được: xử lý định hướng chuỗi liên kết; so sánh nhiều cấu trúc
protein tại một thời điểm.
Từ khoá: cấu trúc protein, so sánh cấu trúc
1. Đặt vấn đề
Protein đóng vai trò chính trong quá trình sinh học của động, thực vật. Với chuỗi trình tự amino
acid giống nhau, nhưng sự liên kết phần tử, nếp gấp khác nhau sẽ tạo ra cấu trúc protein khác
nhau, dẫn đến chức năng và cách thức hoạt động của protein đó cũng khác nhau. Việc dự đoán
cấu trúc bậc 3 của protein để biết quy trình hoạt động, chức năng của protein vẫn là một thách
thức lớn trong lĩnh vực sinh học tính toán.
Có nhiều cách thức để tìm cấu trúc protein, bằng kỹ thuật thực nghiệm có phương pháp chụp x-
quang tinh thể, cộng hưởng từ hạt nhân, hoặc bằng các phương pháp dự đoán như Ab-Initio, mô
hình hóa tương đồng.
Phương pháp cộng hưởng từ hạt nhân (NMR) [1] được sử dụng để xác định cấu trúc và tính năng
của các protein. Việc xác định cấu trúc của protein theo phương pháp này là một quá trình tốn
thời gian và đòi hỏi phải phân tích tương tác của dữ liệu. Có rất nhiều giai đoạn liên quan đến
việc thực hiện cộng hưởng từ hạt nhân; chẳng hạn như chuẩn bị mẫu, cộng hưởng, tạo ra bản trữ,
tính toán và xác định cấu trúc.
Với phương pháp X-quang tinh thể [3] hay được gọi là nhiễu xạ đơn tinh thể qua tia X, là một kỹ
thuật phân tích trong đó sử dụng các mô hình nhiễu xạ tạo ra bằng cách bắn phá một tinh thể duy
nhất với tia X để xác định cấu trúc tinh thể. Các mô hình nhiễu xạ được ghi lại và sau đó phân
tích để tìm ra bản chất của tinh thể. Phương pháp này được sử dụng trong sinh hóa để xác định
cấu trúc của một loạt các phân tử bao gồm DNA và protein.
Việc tìm kiếm cấu trúc protein bằng các phương pháp thực nghiệm rất khó khăn và tốn thời gian,
các nhà nghiên cứu đã cố gắng để tự động hóa quá trình xác định cấu trúc ba chiều của protein
bằng các phương pháp dự đoán.
Đối với các phương pháp dự đoán, trong đó phương pháp mô hình hóa tương đồng [4] là phương
pháp liên quan đến việc xác định một cấu trúc protein được gọi là mẫu với các chuỗi truy
vấn. Sau đó các nguyên tử trong chuỗi tìm kiếm sẽ được so khớp với bản đồ các nguyên tử có
trong bản mẫu. Các chuỗi so khớp với các mẫu cấu trúc được sử dụng để tạo ra một mô hình cấu
trúc kết quả. Phương pháp này dựa trên nguyên tắc là trong hầu hết các trường hợp tương đồng
về trình tự thì cũng giống nhau về cấu trúc. Các bước chính liên quan đến việc mô hình hóa
tương đồng được tóm tắt như sau: chọn mẫu, sắp hàng mẫu đích, xây dựng mô hình và đánh giá
mô hình.
Phương pháp Ab-initio [2] xây dựng mô hình ba chiều của protein từ đầu dựa trên các nguyên lý
vật lý và không đòi hỏi bất kỳ dữ liệu đầu vào như là một cấu trúc đã được biết đến hoặc một mô
hình cấu trúc. Dự đoán cấu trúc protein theo phương pháp Ab-Initio đòi hỏi các thuật toán mạnh
mẽ và tài nguyên tính toán lớn.
Hiện nay số lượng các cấu trúc protein có trong PDB (Ngân hàng dữ liệu protein) [5] phát triển
nhanh chóng với khoảng 73.153 (17/5/2011) cấu trúc đã biết. Tuy nhiên, đây cũng chỉ là một con
số quá nhỏ so với những cơ thể sống đang có xung quanh con người chúng ta. Chính vì vậy, việc
gom nhóm và tìm hiểu cấu trúc của protein để phát hiện các mối quan hệ tiến hóa, xác định các
motif (đoạn lặp), phát hiện mối quan hệ giữa cấu trúc và chức năng của protein là một nhu cầu to
lớn của khoa học về sự sống.
Bài viết được trình bày trong 4 phần; phần thứ nhất giới thiệu về vấn đề cần giải quyết, phần thứ
hai trình bày phương pháp được đề xuất để xây dựng thuật toán tính toán; phần thứ ba giới thiệu
mẫu dữ liệu để thử nghiệm và phần cuối cùng nêu lên một số kết luận và hạn chế.
2. Phương pháp giải quyết
Xét hai protein P1 và P2. Trong Chimera trình tự đặt ra là sắp xếp cấu trúc (trình tự amino acid)
hai protein, rồi sau đó xếp chồng hai protein; tiến hành thay đổi vị trí và thu nhỏ khoảng cách các
phân tử để tìm sự tương đồng cấu trúc tốt nhất.
Cách tiếp cận trong bài viết thực hiện theo quy trình ngược lại, việc xếp chồng hai protein được
thực hiện trước tiên. Sau đó, tính toán các khoảng cách của các nguyên tử α-carbon được sắp
hàng trong hai cấu trúc protein bằng cách thực hiện việc chi tiết hóa về cấu trúc so khớp để giảm
thiểu hơn nữa khoảng cách. Phương pháp tổng quát này cho một kết quả sắp hàng tối ưu, có thể
tóm tắt như sau:
§ Xây dựng một tập các vị trí chồng khớp ban đầu giữa hai cấu trúc cố định bằng cách giữ
nguyên một cấu trúc, cấu trúc còn lại được dịch chuyển hoặc xoay để tìm vị trí so khớp
tốt nhất.
§ Sau khi xếp chồng, xác định các khoảng cách RMSD (Root Mean Square Deviation) tối
thiểu.
§ Tính toán lại khoảng cách giữa các nguyên tử α-carbon
Hình 1. Xếp chồng cấu trúc protein
Phương pháp này sử dụng các vị trí hình học của các nguyên tử α-carbon chính của cấu trúc
protein làm dữ liệu đầu vào. Dữ liệu thử nghiệm bao gồm các protein có độ dài khác nhau và tỷ
lệ nhận dạng khác nhau. Thuật toán chi tiết được cụ thể qua 2 giai đoạn:
Giai đoạn 1: Xếp chồng cấu trúc
P1
P2
Xếp chồng P1 lên P2

§ Giữ cố định P2 và xếp chồng P1 trên P2.
§ Tiến hành dịch chuyển P1 để tìm được sự tương đồng cao nhất. Bài toán so sánh cấu trúc
của các protein được chuyển thành bài toán so sánh các cấu trúc con giữa hai protein
(hình 1).
Giai đoạn 2: Rút ngắn khoảng cách - cực tiểu hóa khoảng cách giữa các nguyên tử được sắp
hàng trong protein
2.1 Xếp chồng cấu trúc protein
Gọi xi là tọa độ ban đầu của nguyên tử thứ i, x'i là tọa độ của nguyên tử thứ i sau khi được dịch
chuyển và xoay, với a là vector tịnh tiến và R là ma trận xoay [7][8]:
x'i = a + Rxi (1)
Phương pháp trong Chimera [6] được sử dụng để tìm so khớp của các nguyên tử X1, ..., Xn trong
P1 với các nguyên tử Y1, ..., Yn trong P2, với điều kiện là P2 được giữ cố định và P1 được chuyển
dịch.
2.2 Cực tiểu hóa khoảng cách
Sau khi xếp chồng, việc cực tiểu hóa khoảng cách hai cấu trúc protein dựa trên việc tính toán
khoảng cách giữa các nguyên tử α-carbon.
Phương pháp sắp hàng tổng quát là một quá trình ba bước:
Bước 1: Cho Dj là khoảng cách nguyên tử Yj, 1 ≤ j ≤ N. Việc tính toán Dj là một quá trình bao
gồm hai bước:
§ Bắt đầu với cấu trúc chồng như mô tả ở trên.
§ Tiến hành so khớp nguyên tử Yj với nguyên tử Vj, trong đó Vj được chọn từ tập (Xj-1, Xj,
Xj+1) để cực tiểu Dj trong công thức (3) và Dst(A, B) là khoảng cách Euclide giữa hai
điểm A và B được tính toán theo công thức (2).
€
ε
=1
NDst(a+Rxi,yi)2
i=1
N
∑
(2)
{ }
),(),,(),,(min 11 jjjjjjj YXDstYXDstYXDstD+−
=
(3)
Bước 2: Tính toán các khoảng cách giữa mỗi cặp nguyên tử Yj và Vj theo công thức (4).
Giả sử Vj có tọa độ
(vj
1,vj
2,vj
3)
và Yj có tọa độ
),,( 321
jjj yyy
. Đối với giá trị T cố định (T là tham số
nhiệt độ với giá trị T = 10 để các nguyên tử được ổn định), chúng ta tính toán tất cả các giá trị
như sau:
d(1, j)=vj
1−yj
1;vj
1' =e−d(1, j)
e−d(1,i)T
i=1
N
∑
d(2, j)=vj
2−yj
2;vj
2' =e−d(2, j)
e−d(2,i)T
i=1
N
∑
d(3, j)=vj
3−yj
3;vj
3' =e−d(3, j)
e−d(3,i)T
i=1
N
∑
(4)
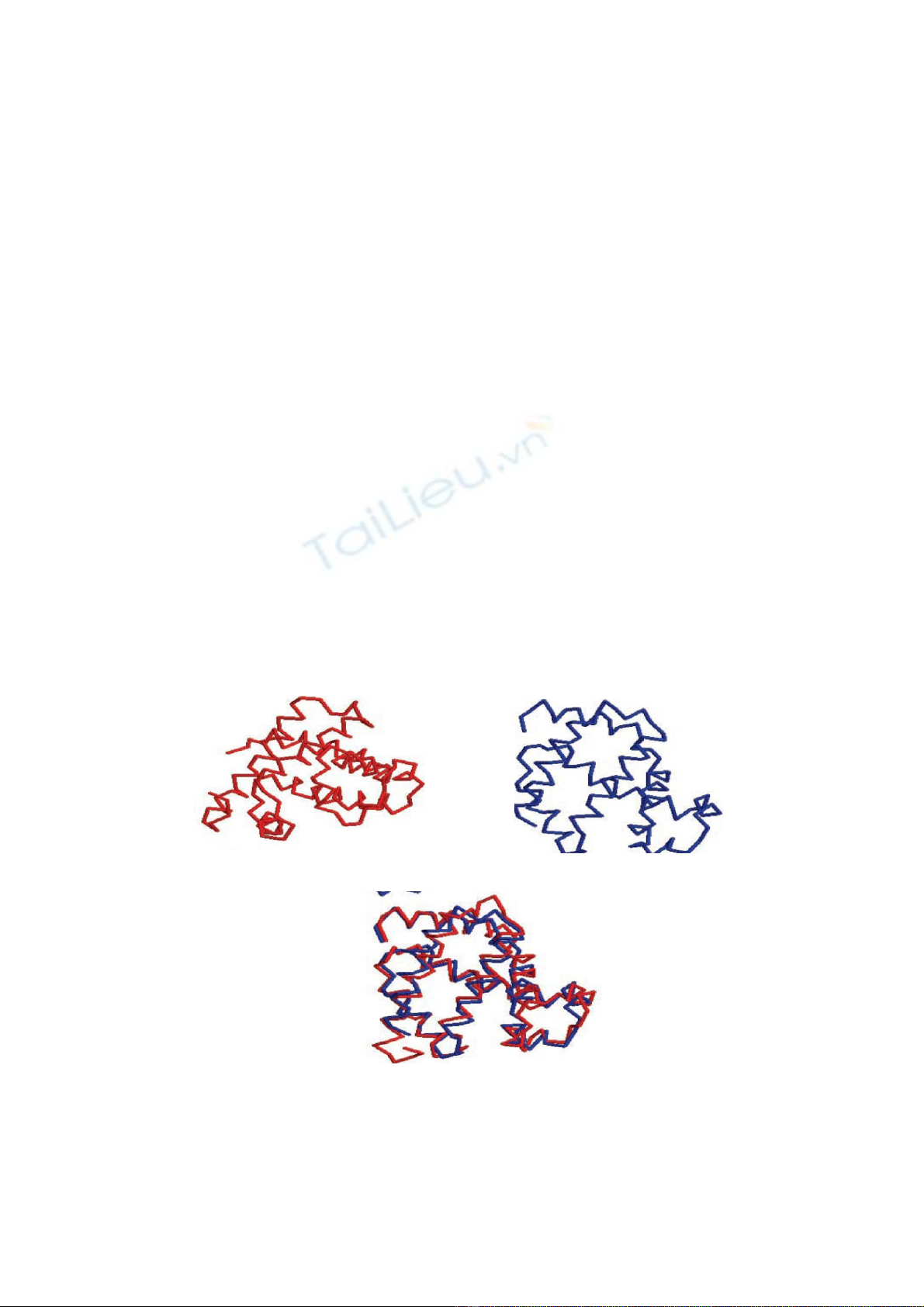
Trong hình 3 là cấu trúc sắp hàng mới, tốt hơn việc xếp chồng đơn thuần trong hình 2.

Hình 2. Sắp hàng protein thông thường
Hình 3. Sắp hàng protein sau khi tính giá trị
Bước 3: Tính khoảng cách giữa các nguyên tử carbon-α được sắp hàng.
Cho
),(,),,(),,( ''22'11 NN VYVYVY …
biểu thị các cặp của các nguyên tử được so khớp.
Trong đó,
Vj=vj
1' +vj
2' +vj
3', 1 ≤j≤N
biểu thị khoảng cách tối thiểu tại bước lặp như mô tả ở
trên. Khoảng cách dựa trên sắp hàng cấu trúc tổng quát cuối cùng εf được tính bởi công thức (5).
)...(
1
21 Nf vvv
N+++=
ε
(5)
3. Dữ liệu mẫu
Dữ liệu mẫu dùng để kiểm tra và mô phỏng được lấy từ ngân hàng protein PDB [5]. Mỗi cấu trúc
có một số nhận dạng bốn ký tự được gọi là PDB ID hoặc số nhận biết PDB, ví dụ: 2RZS,
1GWB, và được lưu trữ trong một tập tin định dạng *.pdb hoặc *.ent.
Tập tin chứa thông tin về trình tự amino acid, tọa độ của phần tử trong không gian ba chiều
v.v… Tọa độ của amino acid và nucleotide trong các protein và acid nucleic được liệt kê thành
từng dòng (ATOM). Bài viết tập trung chủ yếu vào tọa độ không gian x, y, z để xác định tọa độ
nguyên tử trong không gian - cột (G), (H), (I) của Bảng 1.
Bảng 1: Ví dụ mẫu về mục trong PDB
S.No.
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(H)
(I)
(J)
(K)
(1)
ATOM
1
N
MET
A
1
40.184
17.101
24.260
1.00
50.62
(2)
ATOM
2
CA
MET
A
1
38.989
16.442
23.757
1.00
49.62
4. Kết luận
Mặc dù có nhiều phương pháp thực hiện so sánh cấu trúc, nhưng vẫn còn nhiều vấn đề cần
nghiên cứu và mở rộng. Phương pháp được trình bày trong bài báo được mở rộng từ phương
pháp Chimera. Phương pháp đưa ra được kết quả tối ưu hơn so với cách sắp xếp chồng đơn
thuần. Tính toán sự trùng khớp từ việc xếp hàng cấu trúc, rút ngắn khoảng cách hai cấu trúc và
tiến hành dịch chuyển, giúp cho việc thể hiện sự tương đồng của protein một cách chính xác hơn.

Tuy nhiên, vẫn còn một số hạn chế gặp phải và chưa giải quyết được như: xử lý định hướng
chuỗi liên kết; so sánh nhiều cấu trúc protein tại một thời điểm.
Tài liệu tham khảo
[1] Hashim M., Hashimi A.L., Gorin A., Majumdar A., Gosser Y., Patel D.J. (2002). “Towards
structural genomics of RNA: Rapid NMR resonance assignment and simultaneous RNA
tertiary structure determination using residual dipolar coupling.” J.Mol.Biol, Vol.318, pp.
637-649.
[2] Wikipedia – wikipedia, the free encyclopedia, 2010. [Online]. Available from:
http://en.wikipedia.org/wiki/De_novo_protein_structure_prediction
[3] Lonsdale K. (1960). “International tables for X-ray crystallography errata.” Acta Cryst,
Vol.13, p. 49.
[4] Reddy C.S., Vijayasarathy K., Srinivas E., Sastry G.M., Sastry G.N. (2006). “Homology
modeling for membrane proteins: A critical assessment.” Computational Biology and
Chemistry, Vol.30, pp. 120-126.
[5] Protein Data Bank. http://www.pdb.org/pdb/home/home.do
[6] Pettersen E.F., Goddard T.D., Huang C.C., Couch G.S., Greenblatt D.M., Meng E.C., Ferrin
T.E. (2004). “UCSF Chimera – A visualization system for exploratory research and
analysis.” J.Comput.Chem, Vol 25, pp.1605-161.
[7] Berthold K. P. Horn. Closed-form solution of absolute orientation us-ing unit quaternions. In
Journal of the Optical Society of America, volume 4, pages 629–642, 1986.
[8] Eric W. Weisstein. Rotationmatrix. MathWorld–A Wol-fram Web Resource, 2007. [Online].
Available from: http://mathworld.wolfram.com/RotationMatrix.html [cited 28. 11. 2007]


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)