
øng dông logic mê ®iÒu khiÓn hÖ thèng treo b¸n tÝch cùc
KS. TrÇn V¨n Nh−
Khoa C¬ khÝ
Tr−êng §¹i häc Giao th«ng VËn t¶i
PGS. TS. NguyÔn Thanh THñy
Khoa C«ng nghÖ Th«ng tin
Tr−êng §¹i häc B¸ch khoa Hμ Néi
Tãm t¾t: Môc ®Ých cña hÖ thèng treo lμ n©ng cao chÊt l−îng dao ®éng vμ ®é b¸m ®−êng.
Bμi b¸o tr×nh bμy viÖc øng dông lý thuyÕt l«-gÝc mê ®iÒu khiÓn hÖ thèng treo b¸n tÝch cùc víi m«
h×nh dao ®éng ph¼ng däc. §é ªm dÞu chuyÓn ®éng vμ ®é b¸m ®−êng lμ hai thuéc tÝnh ®−îc c©n
nh¾c ®Ó ®−a ra tÝn hiÖu ®iÒu khiÓn. PhÇn cuèi t¸c gi¶ sö dông phÇn mÒm MATLAB ®Ó m«
pháng, so s¸nh ®¸nh gi¸ hÖ thèng treo b¸n tÝch ®iÒu khiÓn mê víi hÖ thèng treo thô ®éng.
Summary: The purpose of any suspension system is to improve the ride quality and road
handling. This paper describes the practical application of fuzzy logic to control a semi-active
suspension system of a one-half-car model. Ride comfort and road handling properties are
considered to be the controller outputs. In the conclusion, a comparison of semi-active
suspension fuzzy control and spring/damper passive suspension is shown, using MATLAB
simulations.
CT 2
i. Tæng quan
HÖ thèng treo lµ mét hÖ thèng quan träng cña « t«, nã cã ¶nh h−ëng trùc tiÕp ®Õn ®é ªm
dÞu chuyÓn ®éng vµ ®é an toµn chuyÓn ®éng cña « t«. CÊu t¹o hÖ thèng treo gåm: phÇn tö gi¶m
chÊn; phÇn tö ®µn håi vµ phÇn tö dÉn h−íng, mçi phÇn tö cã c¸c nhiÖm vô riªng. Víi hÖ thèng
treo thô ®éng hÖ sè c¶n gi¶m chÊn vµ ®é cøng cña phÇn tö ®µn håi lµ h»ng sè, do ®ã hÖ thèng
treo bÞ ®éng chØ ®¸p øng tèt khi chuyÓn ®éng trªn mét lo¹i ®−êng nhÊt ®Þnh. HÖ sè c¶n gi¶m
chÊn cña hÖ thèng treo bÞ ®éng trªn « t« hiÖn vÉn cßn sù m©u thuÉn gi÷a ®é an toµn chuyÓn
®éng vµ ®é ªm dÞu chuyÓn ®éng cña « t«. Khi hÖ sè c¶n gi¶m chÊn thÊp th× ®é ªm dÞu chuyÓn
®éng t¨ng nh−ng ®é an toµn chuyÓn ®éng gi¶m, ng−îc l¹i khi hÖ sè c¶m gi¶m chÊn cao ®é an
toµn chuyÓn ®éng t¨ng nh−ng ®é ªm dÞu chuyÓn ®éng gi¶m. §Ó tho¶ m·n c¸c chØ tiªu ®é ªm
dÞu chuyÓn ®éng vµ ®é an toµn chuyÓn ®éng trªn tÊt c¶ c¸c lo¹i ®−êng kh¸c nhau th× c¸c ®Æc
tÝnh cña hÖ thèng treo cÇn ph¶i thay ®æi trong qu¸ tr×nh « t« chuyÓn ®éng phï hîp víi c¸c ®Æc
tÝnh cña ®−êng. HÖ thèng treo ®iÒu khiÓn ®−îc ph©n thµnh hai lo¹i: tÝch cùc hoµn toµn vµ b¸n
tÝch cùc.
HÖ thèng treo b¸n tÝch cùc ®ang ®−îc c¸c t¸c gi¶ trong vµ ngoµi n−íc quan t©m nhiÒu. C¸c
h−íng nghiªn chñ yÕu: nghiªn cøu m« h×nh ®iÒu khiÓn, ph−¬ng ph¸p ®iÒu khiÓn vµ gi¶m chÊn
tÝch cùc (c¬ cÊu chÊp hµnh). VÒ m« h×nh ®iÒu khiÓn c¸c t¸c gi¶ ®−a ra m« h×nh “sky hook”, m«
h×nh “ground hook”, m« h×nh “hybird”, m« h×nh ®iÒu khiÓn t−¬ng ®èi vµ m« h×nh ®iÒu khiÓn mê
[8], [5], [9], [12]. VÒ ph−¬ng ph¸p ®iÒu khiÓn, c¸c t¸c gi¶ sö dông ph−¬ng ph¸p ®iÒu khiÓn thÝch
nghi [11], ph−¬ng ph¸p ®iÒu khiÓn mê [5], [7], [14], ph−¬ng ph¸p ®iÒu khiÓn tr−ît [15].
II. M« h×nh dao déng «t« trong mÆt ph¼ng däc
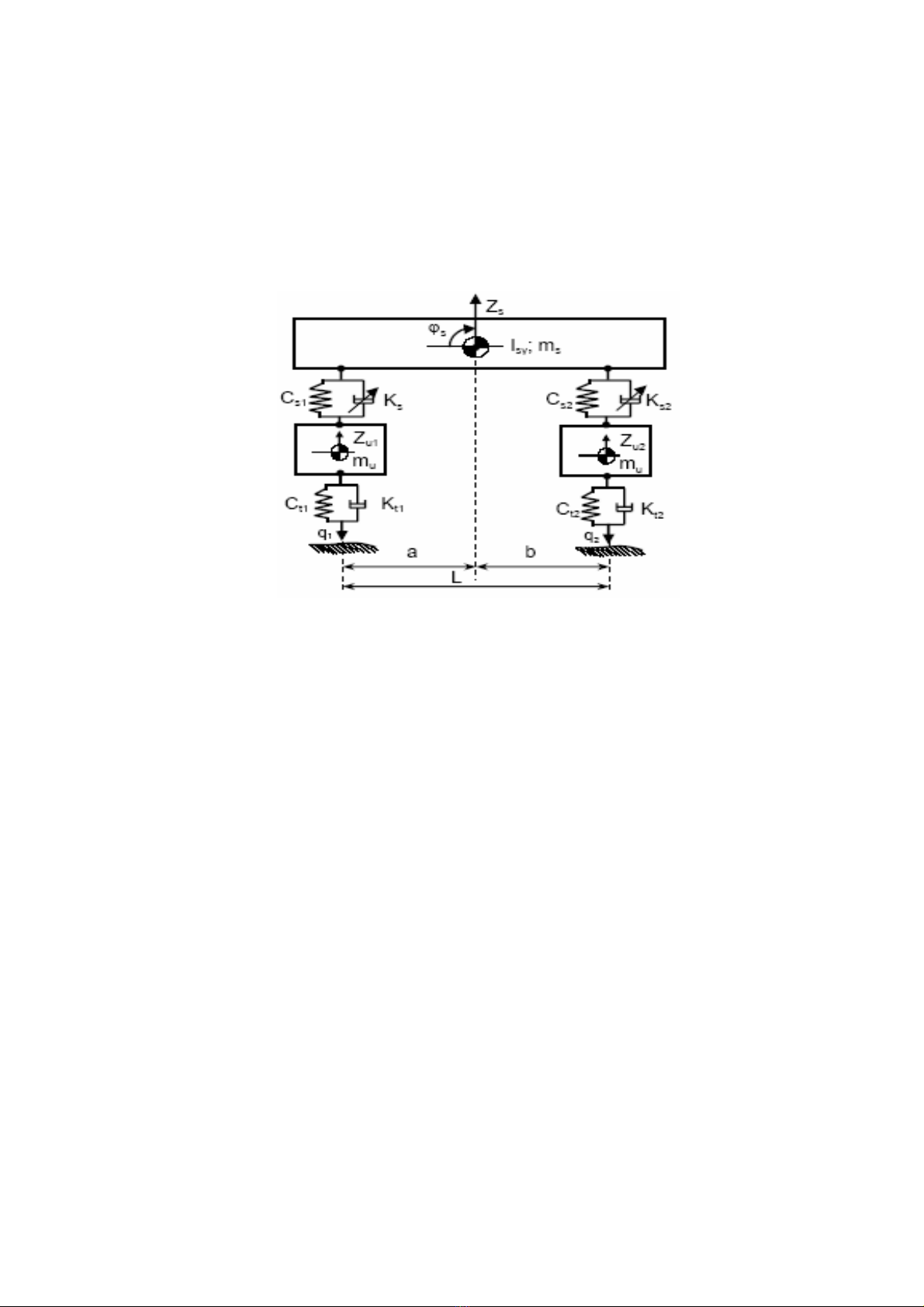
M« h×nh dao ®éng trong mÆt ph¼ng däc cña «t« thÓ hiÖn trªn h×nh 1.
H×nh 1. M« h×nh dao ®éng ph¼ng däc « t« 2 trôc
¸p dông ph−¬ng tr×nh La-gr¨ng lo¹i 2 x©y dùng hÖ ph−¬ng tr×nh vi ph©n cña m« h×nh dao
®éng ph¼ng däc cña «t« 2 trôc viÕt d−íi d¹ng ma trËn: CT 2
Qx].C[x].K[x].M[
=
+
+
&&& (1)
Trong ®ã: [M] - ma trËn khèi l−îng cña hÖ; [K] - ma trËn c¶n nhít cña hÖ; [C] - ma trËn ®é
cøng cña hÖ; x - vÐc t¬ täa ®é suy réng; Q - vÐt t¬ ngo¹i lùc.
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
2u
1u
sy
s
m000
0m00
00I0
000m
]M[ ;
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+−−
+−
−+
−−+
=
2t2s2s2s
1t1s1s1s
2s1s
2
2s
2
1s
2s1s2s1s
KK0b.KK
0KKa.KK
b.Ka.Kb.Ca.K0
KK0KK
]K[ ;
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+−−
+−
−+
−−+
=
2t2s2s2s
1t1s1s1s
2s1s
2
2s
2
1s
2s1s2s1s
CC0b.CC
0CCa.CC
b.Ca.Cb.Ca.C0
CC0CC
]C[
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
ϕ
=
2u
1u
s
s
Z
Z
Z
x; .
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
+
+
=
2t22t2
1t11t1
q.K.qC
q.K.qC
0
0
Q
&
&
III. tæng hîp bé ®iÒu khiÓn mê
Tæng hîp 2 bé ®iÒu khiÓn mê cho hÖ thèng treo b¸n tÝch cùc ký hiÖu lµ FZ1 vµ FZ2. HÖ sè
c¶n cña gi¶m chÊn tr−íc vµ gi¶m chÊn sau ®−îc c¸c bé ®iÒu khiÓn mê ®iÒu khiÓn ®éc lËp dùa
trªn c¸c th«ng tin ®o ®−îc trªn trôc tr−íc, trôc sau vµ khèi l−îng ®−îc treo trªn vÞ trÝ trôc tr−íc,
trôc sau.
Bé ®iÒu khiÓn mê FZ1 cã 4 biÕn vµo: vËn tèc t−¬ng ®èi gi÷a khèi l−îng kh«ng ®−îc treo vµ
®−îc treo trªn c¸c trôc, ký hiÖu Vd; vËn tèc dÞch chuyÓn khèi l−îng ®−îc treo trªn c¸c trôc, ký
hiÖu Vb; vËn tèc khèi l−îng kh«ng ®−îc treo, ký hiÖu Vw vµ gia tèc khèi l−îng ®−îc treo trªn c¸c
trôc, ký hiÖu Ab. Bé ®iÒu khiÓn mê FZ2 cã hai biÕn vµo lµ vËn tèc t−¬ng ®èi gi÷a khèi l−îng
kh«ng ®−îc treo vµ ®−îc treo trªn c¸c trôc, ký hiÖu Vd vµ dÞch chuyÓn t−¬ng ®èi gi÷a khèi l−îng
kh«ng ®−îc treo vµ khèi l−îng ®−îc treo trªn c¸c trôc, ký hiÖu Zd. Mçi biÕn vµo cã 3 gi¸ trÞ ng«n
ng÷: “¢m”, ký hiÖu N; “B»ng 0”, ký hiÖu Z vµ “D−¬ng”, ký hiÖu P.
CT 2
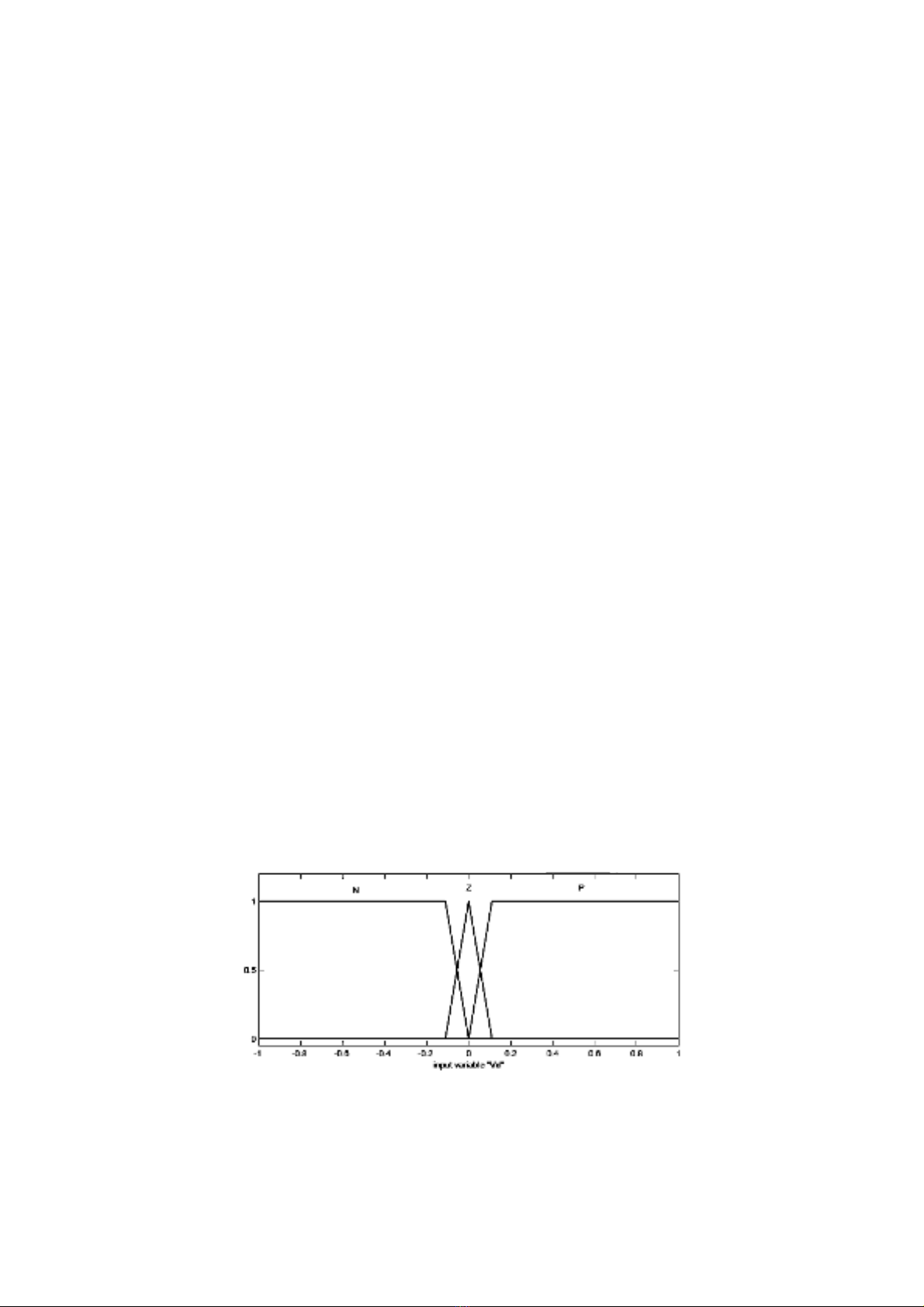
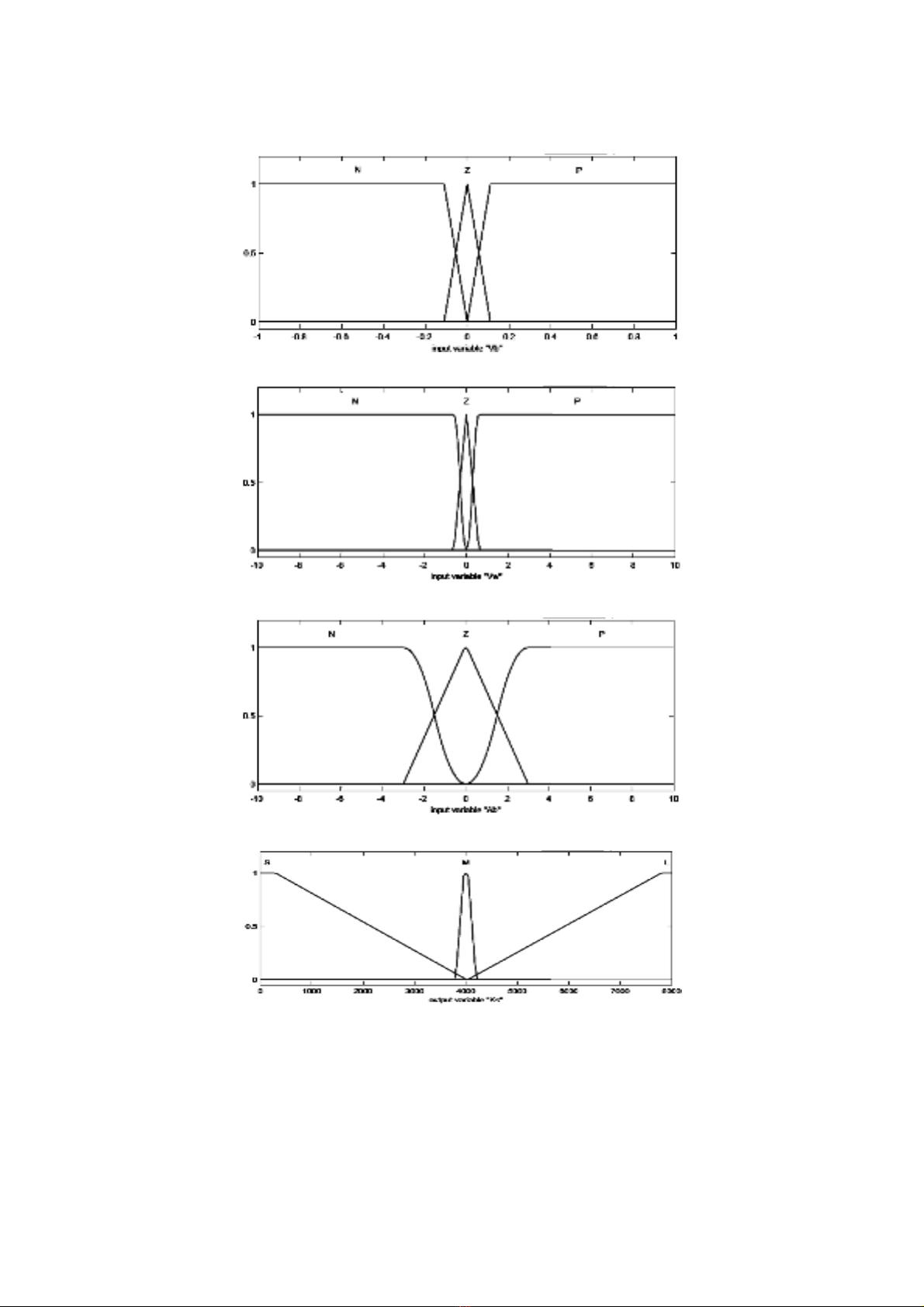
BiÕn ra cña hai bé ®iÒu khiÓn mê lµ hÖ sè c¶n cña gi¶m chÊn, ký hiÖu Ks vµ cã 3 gi¸ trÞ
ng«n ng÷: “Nhá”, ký hiÖu S; “Trung b×nh”, ký hiÖu M vµ “Lín”, ký hiÖu L. Hµm thuéc cña c¸c gi¸
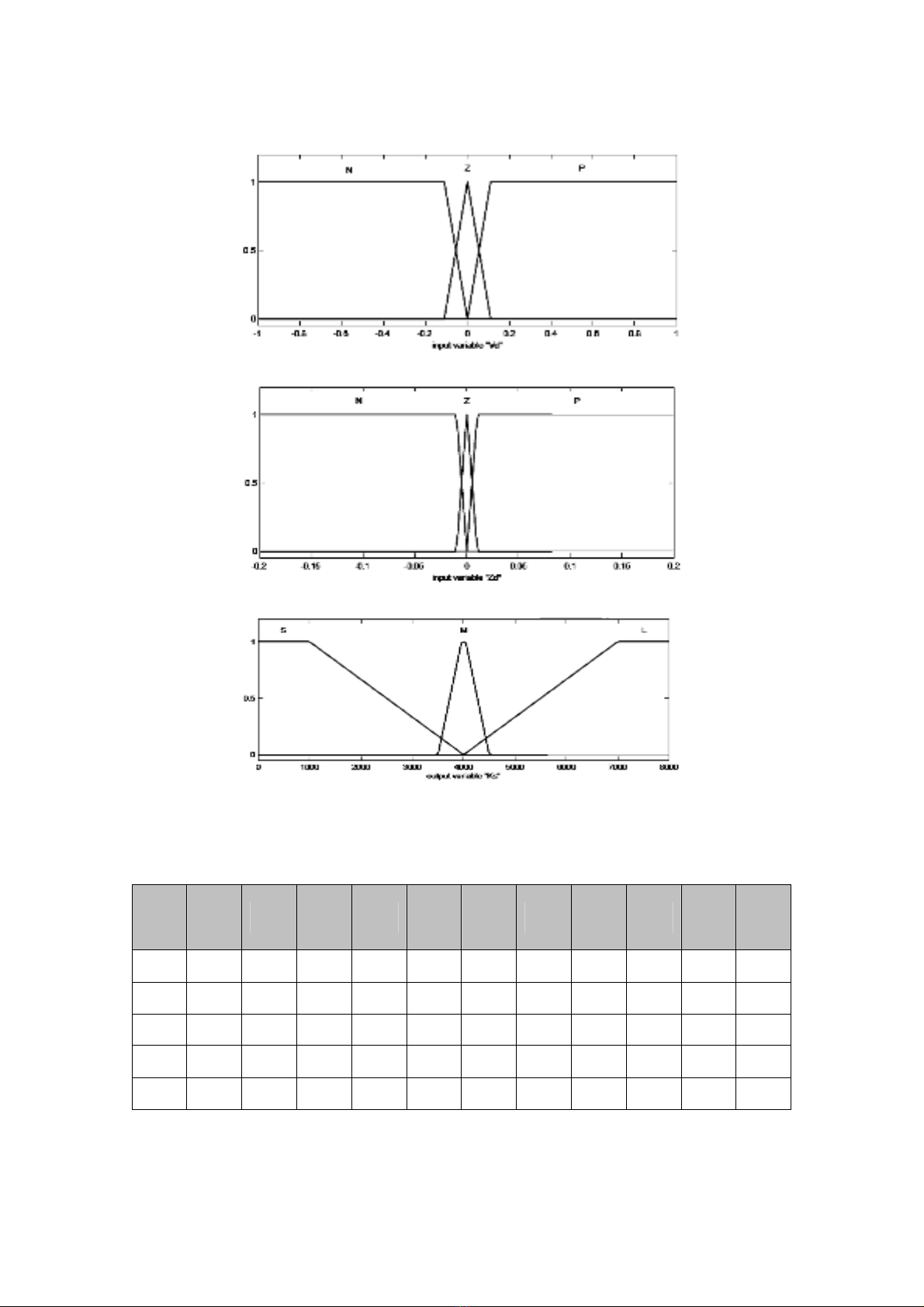
trÞ ng«n ng÷ thÓ hiÖn trªn h×nh 2 vµ h×nh 3. TËp luËt cña bé ®iÒu khiÓn FZ1 thÓ hiÖn trong b¶ng
2, cña bé ®iÒu khiÓn FZ2 thÓ hiÖn trong b¶ng 3.
a)
b)
c)
CT 2
d)
e)
H×nh 2. C¸c hμm thuéc gi¸ trÞ ng«n ng÷ biÕn vμo/ra bé ®iÒu khiÓn mê FZ1
a - vËn tèc dÞch chuyÓn piston gi¶m chÊn, Vd; b - vËn tèc dÞch chuyÓn th©n xe, Vb; c - vËn tèc dÞch chuyÓn
b¸nh xe, Vw; d - gia tèc th©n xe, Ab; e - hÖ sè c¶n gi¶m chÊn, Ks.
a)
b)
CT 2
c)
H×nh 3. C¸c hμm thuéc gi¸ trÞ ng«n ng÷ biÕn vμo/ra bé ®iÒu khiÓn mê FZ2
a - vËn tèc dÞch chuyÓn piston gi¶m chÊn, Vd; b - dÞch chuyÓn th©n xe, Zb; c - hÖ sè c¶n gi¶m chÊn, Ks.
B¶ng 1
STT VdVbVwAbKsSTT VdVbVwAbKs
1 N N - - L 15 Z - P - M
2 N Z - - M 16 P - N - L
3 N P - - S 17 P - Z - M
4 Z N - - M 18 P - P - S
5 Z Z - - M 19 N - - N L


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)