TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 2(37).2010
1
BỘ ĐIỀU KHIỂN CỦA KHÁNG BÙ NGANG KIỂU BIẾN ÁP
THE CONTROLLER OF TRANSFORMER TYPE CONTROLLED SHUNT
REACTORS
Lê Thành Bắc
Trường Đại học Bách Khoa, Đại học Đà Nẵng
Đỗ Văn Cần
Trường Đại học Quy Nhơn
TÓM TẮT
Nghiên cứu để chế tạo và ứng dụng các thiết bị bù có điều khiển nhằm ổn định điện áp,
giảm tổn thất và nâng cao khả năng mang tải của các đường dây truyền tải dài đang là một yêu
cầu cấp thiết. Bài báo trình bày một phương pháp tổng hợp bộ điều khiển cho kháng bù ngang
kiểu máy biến áp và thực hiện mô phỏng bằng phần mềm Matlab – Simulink hiệu quả làm việc
của kháng với bộ điều khiển được thiết kế. Các kết quả nhận được chứng tỏ rằng kháng bù
ngang kiểu biến áp với bộ điều khiển thiết kế cho phép tự động bù 100% công suất phản kháng
dư trên đường dây truyền tải. Với cấu trúc đơn giản và khả năng tác động tức thời cho thấy tính
khả thi cao của việc ứng dụng kháng điều khiển kiểu biến áp vào hệ thống truyền tải điện siêu
cao áp 500 kV hiện nay ở Việt Nam .
ABSTRACT
Any research on the production of controlled shunt reactors and their application to a
power system is necessary to the stabilization of voltage, reduction of load loss and increase of
transfer capacity of UHV/HV power transmission lines. This paper presents a general method
for the controller of transformer type controlled shunt reactors simulated by the Matlab-Simulink
software. The efficiency of such a proposal is also presented in the research and the results
indicate that the designed controller of transformer type controlled shunt reactors can
automatically create 100% compensation charging capacity on the power transmission lines.
Owing to their simple structure and instant reaction capacity, the application of these
transformer type controlled shunt reactors to the 500kV (EHV) power transmission lines in
Vietnam proves to be feasible.
1. Đặt vấn đề
Kháng bù ngang có điều khiển kiểu máy biến áp là loại kháng điều khiển tác
động nhanh, không gây méo dạng dòng điện lưới, có tổn hao rất nhỏ, được mắc cố định
vào lưới truyền tải và có độ tin cậy làm việc rất cao [1]. Kháng bù ngang kiểu biến áp
hoàn toàn khắc phục được các nhược điểm của các loại kháng điều khiển theo nguyên lý
khuếch đại từ luôn gặp phải như: tổn thất công suất trong kháng lớn, làm méo dạng
dòng điện lưới, gây ồn khi làm việc, phạm vi điều chỉnh hẹp và giá thành cao.
Hiện nay, kháng điều khiển kiểu máy biến áp đã được sản xuất và đưa vào vận
hành trong hệ thống điện tại nhiều nước như: Ấn Độ, Liên Bang Nga, Trung Quốc, Đức,
Canada,…. Kháng điều khiển kiểu biến áp trong thực tế vận hành đã cho phép tiêu thụ
công suất phản kháng dư của đường dây một cách linh hoạt làm giảm tổn thất công suất,
tổn thất điện áp, nâng cao khả năng truyền tải và độ ổn định của hệ thống điện [4,5].
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 2(37).2010
2
Việc nghiên cứu ứng dụng loại kháng điều khiển này vào hệ thống truyền tải Việt Nam
nhằm ổn định điện áp, giảm tổn thất điện năng và nâng cao độ ổn định hệ thống là một
nhiệm vụ cấp thiết hiện nay. Trong kháng điều khiển kiểu biến áp thì bộ điều khiển đặc
biệt quan trọng với nhiệm vụ đóng/mở linh hoạt các van thyristor (T) khi công suất
truyền trên đường dây (U, I,
ϕ
) thay đổi thì bộ điều khiển phải đảm bảo tốt nhất về độ
tin cậy làm việc của kháng và hiệu quả bù công suất phản kháng dư trên đường dây.
Bài báo này trình bày về việc tổng hợp bộ điều khiển của kháng bù ngang đặt tại
mỗi nút trên đường dây truyền tải và kết quả mô phỏng trên Matlab – Simulink hiệu quả
tác động của kháng với bộ điều khiển thiết kế để tự động bù 100% công suất phản
kháng dư trên từng phân đoạn đường dây 500 kV sinh ra khi công suất truyền trên
đường dây thay đổi từ không tải đến truyền tải công suất tự nhiên.
2. Yêu cầu của bộ điều khiển và xây dựng hàm điều khiển cho kháng bù ngang
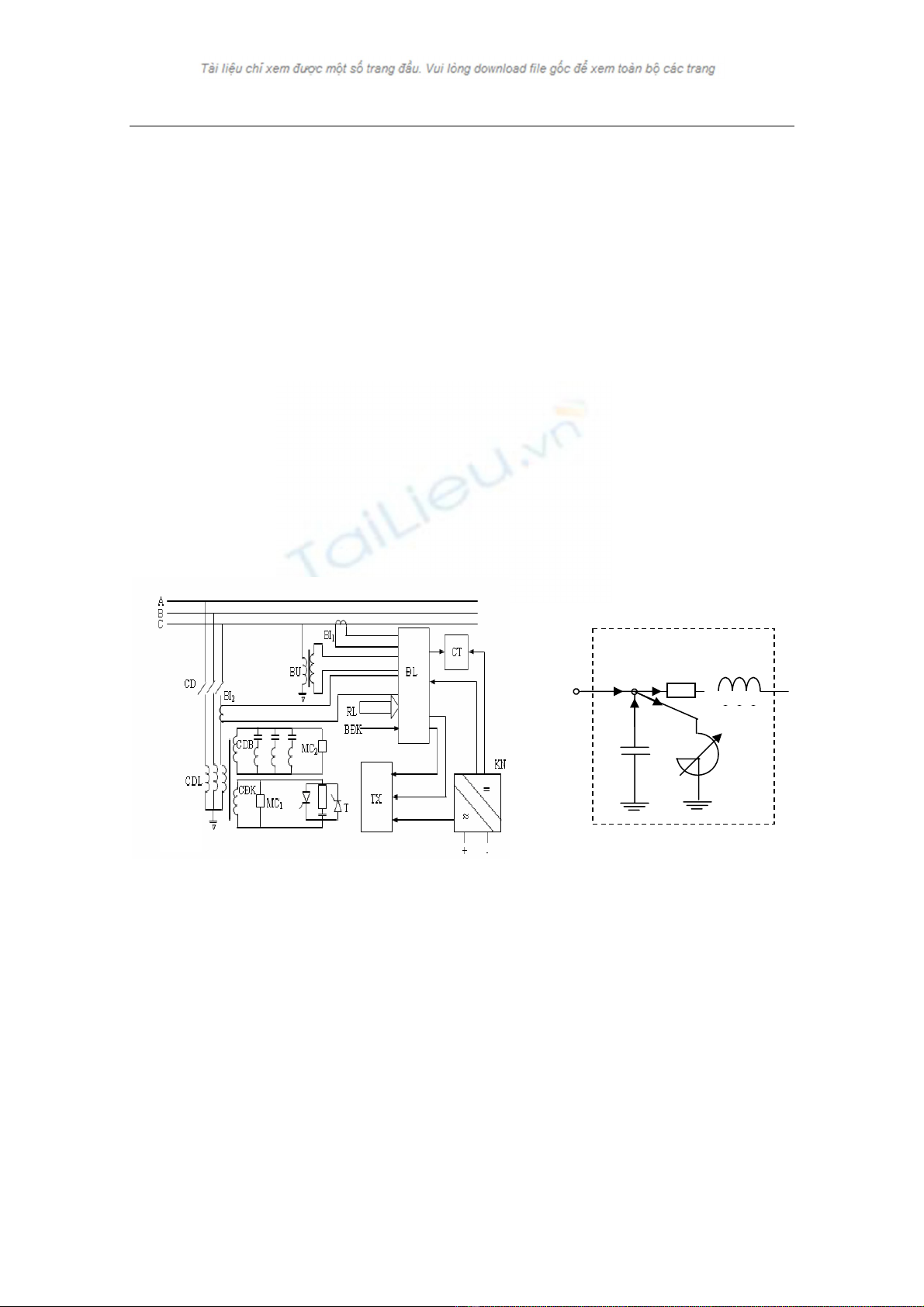
Khảo sát sơ đồ nguyên lý của kháng bù ngang có điều khiển kiểu biến áp [2] như
hình 1. Các tín hiệu phản hồi dòng điện, điện áp, góc lệch pha giữa dòng và áp trên lưới
điện được chuyển về bộ điều khiển xử lý để cho đáp ứng đầu ra tốt nhất điều chỉnh góc
mở các van điều khiển nhằm thay đổi dòng điện (Ik) trong cuộn dây lưới (CDL) của
kháng khi công suất truyền trên đường dây (P) thay đổi.
Hình 1. Kháng bù ngang có điều kiểu biến áp. a)Sơ đồ nguyên lý; b)Sơ đồ 1 pha mạch tương
đương tại nút mắc kháng bù ngang.
Công suất phản kháng dư do đường dây sinh ra khi có tải [1,5]:
(
)
[
]
2
tns /-1λPPPQQQ tnttdtd =−= (1)
Trong đó: Ptn và P là công suất tự nhiên của đường dây và công suất truyền tải
trên đường dây; thành phần công suất điện trường do dung dẫn đường dây Cd sinh ra là
Qdt và thành phần công suất từ trường trên đường dây do dòng tải I gây ra trên điện cảm
Ld đường dây là Qtt.
Để thỏa mãn bù 100% công suất phản kháng dư trên đường dây, tức là đảm bảo
với mọi giá trị P thì Qđt = Qtt + Qk (ở đây giả thiết là công suất phản kháng của tải Q đã
a)
Ld
Rd
Ik(Qk)
I
Ic(Qđt)
Id
Uf
Lk
Cd
b)
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 2(37).2010
3
được bù hết ở cuối đường dây Q = P.tanφ = 0 và U
≈
const), khi đó hàm điều khiển của
kháng bù ngang [1,2,5] là:
22 )/(1)/(1 tntn IIPP −=−=
β
(2)
Khi điều khiển kháng theo hàm (2) để bù 100 % công suất phản kháng dư trên
đường dây sẽ cho phép tối ưu hóa tổn thất công suất trên đường dây [5]. Trong chế độ
không tải dòng điện trên đường dây do dung dẫn tạo ra (IC-đặc trưng cho Qđt do dung
dẫn đường dây tạo ra) làm cho điện áp ở cuối đường dây dài tăng cao, cho nên cần có
dòng kháng Ik mang tính cảm để khử dòng dung tương ứng, lúc này dòng điện Ik qua
cuộn lưới của kháng cần đạt giá trị lớn nhất. Theo sơ đồ hình 1,a thì dòng điều khiển
trong cuộn dây điều khiển IDK lúc này cũng phải cực đại, ứng với góc mở thyristor (T)
là nhỏ nhất (αmin). Khi truyền tải công suất tự nhiên (Ptn) dòng điện trên đường dây do
dung dẫn tạo ra IC bằng với dòng điện cảm đường dây (IC = IL với IL đặc trưng cho tổn
thất công suất phản kháng L
Q∆trên đường dây) làm cho thành phần phản kháng của
đường dây sinh ra bằng không (tự bù 100%). Khi đó kháng bù ngang không cần “bù”
nữa, dòng điện qua kháng Ik lúc này cần cực tiểu (Ik=Ik.min
≈
0), ứng với góc mở T là cực
đại(αmax-van T đóng hoàn toàn).
Trong chế độ làm việc với công suất tải trên đường dây biến thiên từ 0 đến Ptn
thì dòng điện trong cuộn điều khiển có quan hệ hàm số với góc mở van IDK= f(α). Khi
công suất truyền tải thay đổi thì dòng cảm kháng đường dây IL cũng thay đổi trong
phạm vi 0 đến IC, để bù 100% lượng công suất phản kháng dư trên đường dây tạo ra thì
kháng phải có dòng điện cảm Ik để cho tại các nút có đặt kháng (Hình 1,b) luôn thỏa
mãn phương trình:
Lk C
I
II+=
(3)
Giảm dần Ik đồng nghĩa với việc giảm dòng điện ở cuộn điều khiển IDK, góc mở α
sẽ từ αmin tăng dần tới αmax. Khi công suất truyền tải trên đường dây giảm từ Ptn về P=0
thì quá trình điều khiển kháng bù ngang yêu cầu ngược lại quá trình vừa nêu trên.
Ở đây xét kháng có công suất lớn nên thành phần điện trở rất bé so với thành phần
điện kháng, do đó khi xét đến quan hệ dòng điện giữa các cuộn dây của kháng ta bỏ qua
điện trở mà chỉ quan tâm đến thành phần điện kháng.
3. Tổng hợp bộ điều khiển cho kháng bù ngang
Từ sơ đồ nguyên lý điều khiển kháng trên hình 1 ta có các khối điều khiển [2,3]
tương ứng như sau:
3.1. Khối cảm biến đo lường
Trong thiết bị điều khiển thường sử dụng TU, TI như những bộ khuếch đại, một
số yêu cầu điều khiển chính xác hơn thì TU, TI được xét đến thời gian trễ do mạch từ và
cũng có hằng số thời gian tương ứng TU, TI. Do đó ta có hàm truyền đạt của 2 khối TU,
TI và khối đo góc lệch pha [2] như sau:
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 2(37).2010
4
1+
=sT
K
G
U
U
TU với
vao
ra
UU
U
K=; 1+
=sT
K
G
I
I
TI với
.
.
vao
ra
II
I
K=; sT
G
ϕ
ϕ
1
= (4)
3.2. Khối điều khiển thyristor
Đầu vào Uđ phản hồi từ TU, đại lượng đầu ra là UĐK >> Uđ kể cả độ lớn và công
suất nên bộ điều khiển thyristor có thể coi là khâu khuếch đại với hệ số khuếch đại Kthy
= duDK/duđ. Khâu khuếch đại bao gồm quá trình chuyển mạch của tranzistor biến áp
xung, và thyristor là bộ trễ với thời gian cực đại τ =1/fp (p là tần số đập mạch của bộ
điều chỉnh xoay chiều).
3
3
10.50
10
10.500 ==≈
đ
DK
thy U
U
K; Tp
thythy eKG −
=, mà
Ts
TsTsTs
eTs +=+≈+++= 1
!1
1...
!2
)(
!1
1
2
0033,0)2/(2 ≈= fpTthy
π
; )1/(
+
=
sTKG thythythy (5)
3.3. Khối đối tượng là kháng bù ngang kiểu biến áp
Khi thiết lập hàm truyền ta thấy các thành phần bậc 2 của cuộn bù Zbù(s) rất nhỏ
và chỉ có tác dụng trong các dòng điện bậc 3, 5, 7 nên ta có thể bỏ qua các thành phần
này [2], ta có:
(
)
()
bu
bu
bu
bu
kXsLR
XsLR
sLR
XX
XX
XsZ ++
+
++=
+
+=
22
22
11
2
2
1
)(
()
(
)
()
()
1
1
2
3322
2
3322
11 +++++
++++
++=
bububububu
bubububu
CLssCsLsCRsCsLR
CLssCsLsCRsLR
sLR (6)
Trong đó: A = 11 sLR +;B = 22 sLR +;
(
)
)(
33 sZsLRC bu
+
+
=
()
3322 )( sLsZRsLRD bu
+
+
+−−= .
Với R1, L1. R2, L2, R3, L3 tương ứng là điện trở và điện cảm của cuộn lưới, cuộn điều
khiển và cuộn bù của kháng điện (Hình 1,a). Cbu, Lbu là các điện cảm và điện dung của
cuộn lọc sóng hài bậc cao (k =3, 5, 7). Do đó, đối tượng kháng được mô tả toán học như
sau:
Hệ số khuếch đại của kháng:
(
)
()
)(
)(
33
3322
2
1
.sZsLR
sLsZRsLR
C
D
I
I
G
bu
bu
Ik ++
+++−−
===
()
(
)
()
1
1
3
2
3
23
2
32
+++
+−++−
=
bubububu
bubububububu
CsRsCLCL
sCRCRsCLCLCL (7)
Tổng trở tương đương tại nút lắp kháng của phân đoạn đường dây (hình 1,b) khi
Laplace hóa là:
(
)
kd
kdkdd
kd
k
dht LCs
LLsLCLs
LCs
sL
sLpZ 2
3
211
)( +
++
=
+
+= (8)

TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 2(37).2010
5
Trong đó:Ld -điện cảm của một nửa phân đoạn đường dây; Lk -điện cảm của
kháng bù tại nút; Cd -dung kháng tập trung của một nửa phân đoạn đường dây tại nút.
Chức năng của kháng là hiệu chỉnh thành thành phần phản kháng của dòng điện
sao cho góc lệch pha (phi) của điện áp u và dòng điện i ở cuối mỗi đoạn đường dây là
bằng không.
Khi mắc kháng bù ngang vào hệ thống điện thì gần đúng xem điện dung của
đường dây tương đương với điện dung Cd tập trung tại 2 đầu nút mỗi phân đoạn với sơ
đồ như trên hình 1,b. Khi đó hệ thống điều khiển của kháng được xây dựng cùng với
đường dây như sau:
Hình 2. Sơ đồ hệ thống điều khiển kháng điện
3.4. Thiết kế các bộ điều chỉnh PID cho kháng (R1, R2)
3.4.1. Bộ điều chỉnh PID1 mạch vòng dòng điện của kháng [2]
Để bù 100% công suất phản kháng dư của đường dây (để dòng và áp trên đường
dây đồng pha với nhau) khi có sự thay đổi phụ tải, tín hiệu đặt cho bộ điều khiển là Ikđặt
của hệ thống và tín hiệu phản hồi cho bộ điều khiển là dòng điện kháng Ik cần điều
khiển để bù. Từ hai tín hiệu phản hồi dòng và áp tải được phân tích đo góc lệch pha của
chúng tính thành phần dòng điện cảm IL của dòng truyền tải, từ đó điều khiển dòng Ik
sao cho bù thỏa mãn phương trình (3). Để bù một giá trị Ik nào đó tương ứng với yêu
cầu (3), hệ thống điều khiển với 2 bộ điều khiển (được xây dựng như hình 2), giá trị này
thay đổi khi tải (P, IL) thay đổi.
Hàm truyền đối tượng thứ nhất Gs1(s): )(
)(
.
1
)(
1sC
sD
sT
K
sG
thy
thy
s+
= . Đây được xem
là hàm truyền đối tượng quán tính bậc 1 và hàm truyền đạt hệ hở:
1)(
)(
.
1
)(
1++
=sT
K
sC
sD
sT
K
sG
ik
ik
thy
thy
h. Sơ đồ trình bày trên hình 3. Hệ thống có hàm truyền hở:
)1)(1)(1( 3
1
1+++
=sTsLsT
K
G
Ikthy
h và hàm truyền đạt hệ kín: )1/( 111 hhk GGG +
=
. Giả sử
T1 > T2 >>T3, ở đây ta sử dụng bộ PID để bù 2 hằng số thời gian lớn.
Với bộ điều chỉnh R1(s) thì:
(
)( )
sT
sTsT
sT
sT
KsR
R
BA
D
I
p
1
11
1
1
11
111
1)( ++
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛++= (9)


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)