NGHIÊN CỨU THIẾT KẾ CHẾ TẠO MÁY KHOAN BO
MẠCH ĐIỆN TỬ TỰ ĐỘNG KB-07
RESEARCHING, DESIGNING AND MAKING AN AUTO DRILL MACHINE
FOR PRINTED CIRCUIT BOARD KB-07
PHẠM ĐĂNG PHƯỚC
Trường Đại học Phạm Văn Đồng
NGUYỄN HỮU NAM
Học viên cao học khoá 2004-2007
TÓM TẮT
Bài báo giới thiệu kết quả nghiên cứu thiết kế, chế tạo máy khoan bo mạch điện tử tự động
KB-07. Máy sử dụng truyền động vitme-đai ốc bi và kỹ thuật điều khiển tự động động cơ điện
một chiều. Tín hiệu điều khiển các động cơ được truyền qua cổng song song LPT1 của máy
tính. Thông số xác định tọa độ lỗ khoan lấy từ dữ liệu thiết kế mạch in trên phần mềm Orcad.
ABSTRACT
The paper presents results of research on designing and making an auto-drill machine for
printed circuit boards. The machine has ball-screw transmissions and technique of auto
controlling the direct current motors. The control signal is transmitted to motors via a parallel
port (LPT1) of the personal computer. The co-ordinate data of drilling holes are inserted from
the printed circuit board designed in Orcad software.
1. ĐẶT VẤN ĐỀ
Những năm gần đây phong trào học tập và nghiên cứu lĩnh vực cơ điện tử đã trở nên
phổ biến tại Việt Nam và hầu hết các thiết bị được điều khiển tự động đều có sử dụng bo mạch
điện tử, khiến nhu cầu gia công mạch in ngày càng lớn.
Việc sử dụng các máy khoan cầm tay và máy khoan bàn thông thường để khoan các lỗ
nhỏ trên bo mạch in thường thiếu chính xác và mất nhiều thời gian. Máy khoan bo mạch điện
tử tự động với các ưu điểm về độ chính xác và năng suất gia công sẽ giải quyết được các hạn
chế nói trên của các máy khoan thông thường.
2. THIẾT KẾ KẾT CẦU VÀ HỆ ĐIỀU KHIỂN MÁY KHOAN KB-07
Máy khoan KB-07 có thân máy và bàn máy
cấu tạo bằng thép tấm dày 0,2mm, đảm bảo độ cứng
vững. Bàn máy có thể chuyển động tịnh tiến theo hai
phương vuông góc với nhau.
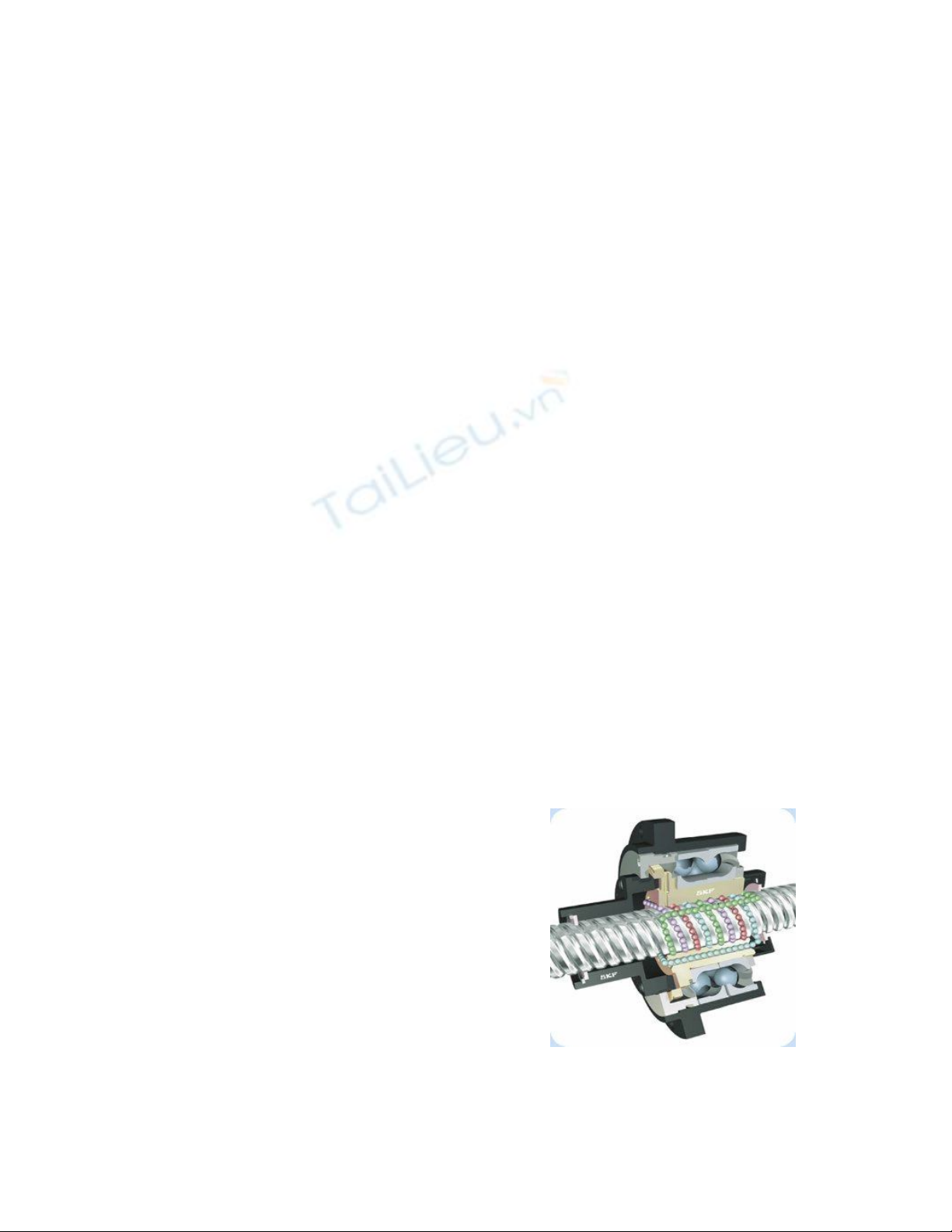
Để đạt được độ chính xác gia công, máy
khoan KB-07 sử dụng các bộ truyền vit-đai ốc bi có
độ chính xác truyền động cao. Ngoài ra các khớp nối
giữa động cơ dẫn động và bộ truyền động đều là các
khớp nối cứng để tránh sai số truyền động.
Các động cơ dẫn động của máy là các động
cơ điện một chiều điện áp 24V, công suất động cơ
dẫn động các trục của bàn máy là 27W và động cơ
dẫn động đầu khoan là 18W, công suất động cơ
Hình 1
.
B
ộ truyền Vitme
-
đai
ốc bi
khoan là 18W. Các bộ truyền vit-đai ốc bi có đường kính 10mm.
8
6
911
10
7
5
4
3
2
1
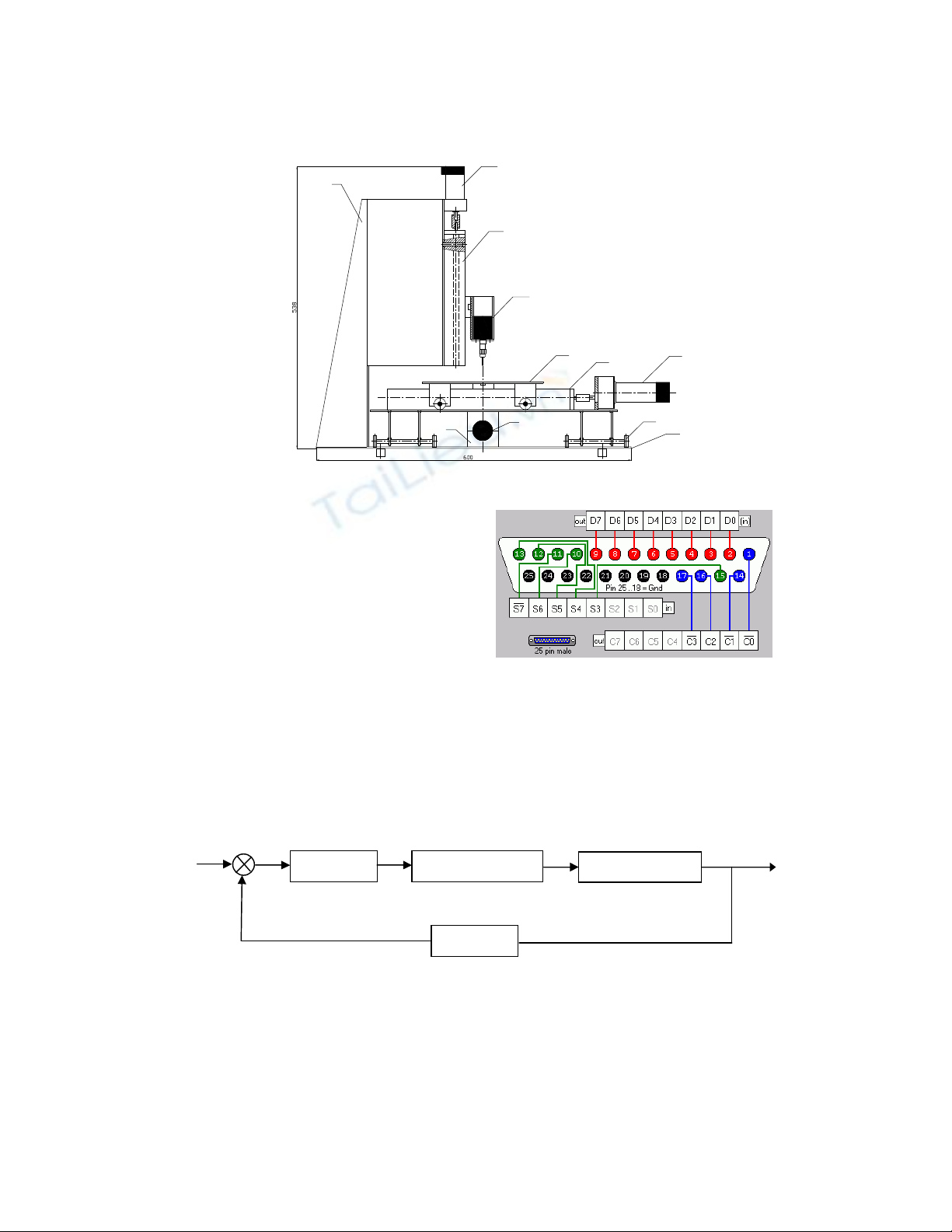
Hình 2. Kết cấu máy khoan KB-07
Máy khoan được điều khiển tự động
bằng chương trình viết bằng ngôn ngữ
lập trình Delphi. Tín hiệu điều khiển
được truyền đến các động cơ qua cổng
song song LPT1 của máy tính. Phương
pháp này có ưu điểm là tín hiệu được
truyền song song nên việc nội suy thực
hiện được dễ dàng, tương thích TTL nên
không cần module chuyển đổi.
Hình 3. Cổng song song LPT1
Mạch xử lý được thiết kế để xử lý tín hiệu từ chương trình máy tính truyền trực tiếp
thông qua cổng song song nên có cấu trúc mạch đơn giản. Tín hiệu qua khối khuếch đại đến
động cơ, các chân của cổng song song, được cách ly an toàn thông qua bộ cách ly quang học
PC817, để bảo vệ máy tính. Các Transistor C1815 được sử dụng ở ngõ ra của cổng LPT1 có
tác dụng đưa tín hiệu điều khiển “chưa thật sự chuẩn” về tín hiệu chuẩn mà các IC logic có thể
nhận biết được.
Hình 4. Sơ đồ khối hệ thống điều khiển
Mạch động lực sử dụng mạch kiểu cầu H, với transistor hiệu ứng trường IRF 540 (Loại
nghịch) và IRF9540 (Loại thuận) đây là transistor cho dòng tải lớn (đến 19A), điều khiển bằng
điện áp không cần dòng kích. Để đảm bảo các transistor này không mở cùng lúc, mạch logic
được thiết kế dựa trên bộ đệm sử dụng IC 74LS541.
1- Thân máy
2- Động cơ dẫn động trục Z
3- Vit- đai ốc bi & bàn trượt trục Z
4- Động cơ khoan
5- Bàn máy
6- Vit- đai ốc bi & bàn trượt trục Y
7- Động cơ dẫn động trục Y
8- Vit-đai ốc bi & bàn trượt trục X
9- Động cơ dẫn động trục X
10- Con lăn đỡ
11- Đế máy
u
Máy tính
Các kh
ối xử lý
Đ
ộng c
ơ DC
Encoder
x,v
Mạch động lực kiểu cầu H có ưu điểm là không phát sinh nhiễu rơle, có khả năng đáp
ứng tốt, đặc biệt là không sinh ra trễ khi cần đảo chiều động cơ nhanh, mặt khác nó còn có khả
năng tự khóa hãm động cơ khi ngắt tín hiệu điều khiển, giúp giảm thiểu đáng kể quán tính của
động cơ khi dừng chuyển động, nhằm giảm sai số tích lũy.
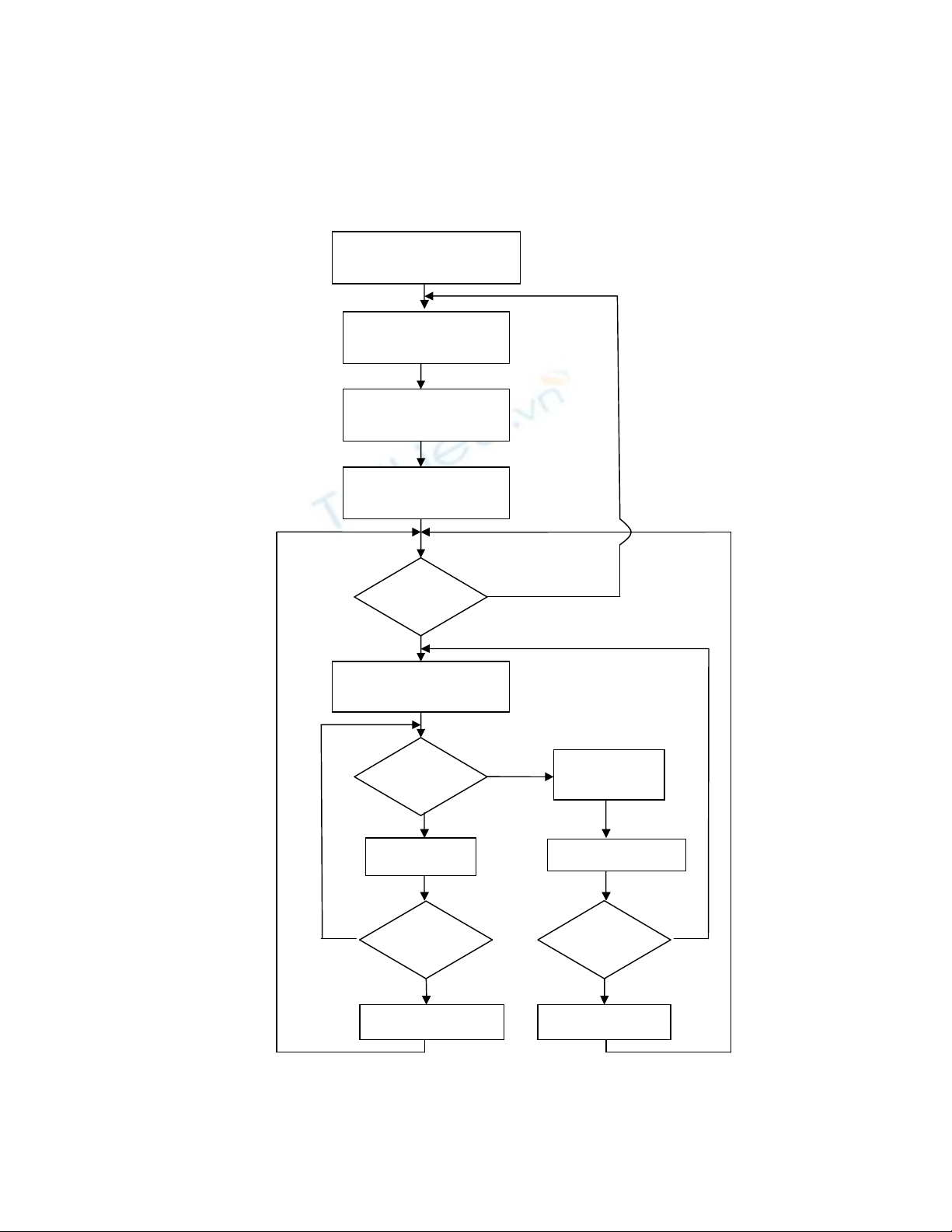
Chương trình điều khiển được viết bằng ngôn ngữ Delphi với thuật toán như sau:
Hình 5. Thuật toán chương trình điều khiển
Xuất file dữ liệu thiết kế
từ Orcad (Drill.tmp)
Nhập vào bộ nhớ
các tọa độ điểm khoan
Sắp xếp các điểm theo
thứ tự tọa độ
Thiết lập các
thông số điều khiển
Lệnh
điều khiển
Xử lý tín hiệu encoder
Theo gia số x,y
x=0,
y=0
Quay động cơ
Lệnh điều
khiển dừng
Lưu các thông số
Hãm động cơ
Điểm gia
công =0
Kết thúc gia công
N
Y
N
Y
Y
N
Y
N
Giảm điểm gia công

Giao diện chương trình điều khiển gồm: Cửa sổ cấu hình hoạt động, Cửa sổ dữ liệu
nhập vào và Cửa sổ lộ trình chạy dao.
Hình 6. Giao diện chương trình điều khiển
3. KẾT QUẢ VÀ THẢO LUẬN
Máy khoan KB-07 được thiết kế chế tạo thoả mãn các yêu cầu đề ra với các đặc điểm sau:
- Sử dụng các bộ truyền vit-đai ốc bi cho các chuyển động tọa độ.
- Sử dụng các động cơ một chiều để dẫn động các trục quay và các encoder quang để phản hồi
tín hiệu vị trí tại các trục quay.
- Chế tạo mạch chuyển đổi tín hiệu kết nối máy tính qua cổng LPT1 và viết chương trình
điều khiển máy khoan bằng ngôn ngữ lập trình Delphi.
- Máy khoan KB-07 có thể gia công bo mạch in có kích thước lớn nhất là 200x300mm, với
công suất khoan trung bình khoảng 20 điểm /phút, sai số vị trí không quá 0,5mm.
Tuy nhiên máy vẫn còn một số nhược điểm như chương trình điều khiển cần phải nâng
cấp để nâng cao độ chính xác khi gia công các bo mạch in có mật độ lỗ dày đặc, hoặc các bo
mạch có kích thước lớn. Đồng thời, cần cải tiến về hình thức để nâng cao tính thẩm mỹ, hoàn
thiện dần để trở thành sản phẩm thương mại.
4. KẾT LUẬN
Máy khoan bo mạch điện tử tự động KB-07 đã giải quyết được vấn đề về độ chính xác
và năng suất gia công so với việc sử dụng các máy khoan thông thường để gia công khoan bo
mạch in. Máy có thể được sử dụng trong sản xuất và làm mô hình giảng dạy cho sinh viên
ngành cơ điện tử.
TÀI LIỆU THAM KHẢO
[1] Bùi Quốc Khánh - Nguyễn Văn Liễn - Phạm Quốc Hải - Dương Văn Nghi, (2006) Điều chỉnh
Tự động Truyền động điện - NXB Khoa học và Kỹ thuật.
[2] Nguyễn Văn Nhờ (2003 ) - Cơ sở truyền động điện - NXB Đại học Quốc gia TP.Hồ Chí Minh
[3] Bùi Quý Lực (2004), Hệ thống điều khiển số trong công nghiệp, Nhà xuất bản Khoa học và Kỹ
thuật.
[4] Phạm Đăng Phước, (2001), Giáo trình Robot Công nghiệp, ĐHBK Đà Nẵng.
[5] Jan Alexson, Parallel Port Complete: Programming, Interfacing & Using the PC'S Parallel
Printer Port, 2000.


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)