
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 6(35).2009
61
ỨNG DỤNG XỬ LÝ TÍN HIỆU SỐ (DSP) ĐIỀU KHIỂN
TỐC ĐỘ ĐỘNG CƠ ĐIỆN MỘT CHIỀU
THE APPLICATION OF THE DIGITAL SIGNAL PROCESSOR TO THE
CONTROL OF THE DC ELECTRIC MOTOR SPEED
Võ Như Tiến
Trường Cao đẳng Công nghệ,
Đại học Đà Nẵng
Phan Điền
Trường Cao đẳng Nghề Qui Nhơn
TÓM TẮT
Với sự phát triển ngày càng cao của kỹ thuật vi xử lý và máy tính, hệ truyền động điều
khiển số ngày càng được ứng dụng rộng rãi và dần thay thế cho hệ truyền động điều khiển
tương tự. Hệ điều khiển số có ưu điểm gọn nhẹ, làm việc an toàn, tin cậy, độ chính xác cao, xử
lý nhiều dữ liệu của hệ thống một cách đồng thời, nhanh chóng. Bài báo trình bày phương pháp
điều khiển tốc độ động cơ điện một chiều bằng cách sử dụng bộ xử tín hiệu số DSP (Digital
Signal Processor). Việc dùng bộ điều khiển số có thể cho phép thay đổi và khống chế các thông
số một cách linh hoạt, dễ dàng và thuận tiện cho việc giám sát các tín hiệu bởi các thiết bị hiển
thị số hoặc máy tính.
ABSTRACT
With higher and higher development of micro-processing techniques and the computer,
the driver system that applies the digital control system is widely used and gradually replaces
the old system using the analog control system. The digital control system has the advantage of
being simple, safe, reliable and accurate and it can deal with various data of the system rapidly
and simultaneously. This article presents the method that controls the DC motor speed by using
the Digital Signal Processor. It can adjust and restrain parameters properly; therefore, the
supervision of the signals on digital display equipment or the computer becomes easier and
more convenient.
1. Giới thiệu
Ngày nay, với sự hội nhập quốc tế, sự cạnh tranh của nền kinh tế toàn cầu ngày
càng cao, đòi hỏi doanh nghiệp phải không ngừng cải tiến công nghệ để nâng cao hiệu
quả sản xuất. Trước những thách thức đó, các hệ truyền động luôn đóng một vai trò rất
quan trọng, chúng là động lực chính quyết định năng suất và chất lượng sản phẩm. Vì
vậy, việc nghiên cứu tìm giải pháp để cải thiện chất lượng các hệ truyền động là hết sức
cần thiết. Động cơ điện, một trong những bộ phận quan trọng của các hệ truyền động
cũng luôn được quan tâm và cải tiến. Hiện nay, có rất nhiều loại động cơ được sử dụng
trong công nghiệp, mỗi loại có những ưu nhược điểm riêng và được ứng dụng trong
những lĩnh vực nhất định.
Với sự phát triển mạnh mẽ của kỹ thuật vi tính, đặc biệt là kỹ thuật xử lý tín
hiệu số (Digital Signal Processor) đã cho phép giải quyết các thuật toán phức tạp điều
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 6(35).2009
62
khiển động cơ điện, trong điều kiện thời gian thực với chất l ượng điều khiển có độ
chính xác, độ tin cậy cao, xử lý nhiều dữ liệu của hệ thống một cách đồng thời, nhanh
chóng. Ngoài ra hệ thống số còn có thể ghép nối với máy tính, thuận tiện cho việc điều
khiển và có thể điều khiển nhiều kênh đồng thời, truyền và giữ tin được lâu. Do vậy, hệ
truyền động điện điều khiển số ngày càng được ứng dụng rộng rãi.
2. Phương trình động học của động cơ điện một chiều kích từ độc lập
Giá trị của mômen điện từ được xác định:
AMAm
IkI
a
pN
MΦ=Φ=
π
2
(1)
trong đó:
a
Np
kM
π
2
.
=
- hằng số mômen,
p - số đôi cực từ của động cơ;
N - tổng số thanh dẫn của dây quấn phần ứng;
a - số đôi mạch nhánh song song của dây quấn phần ứng;
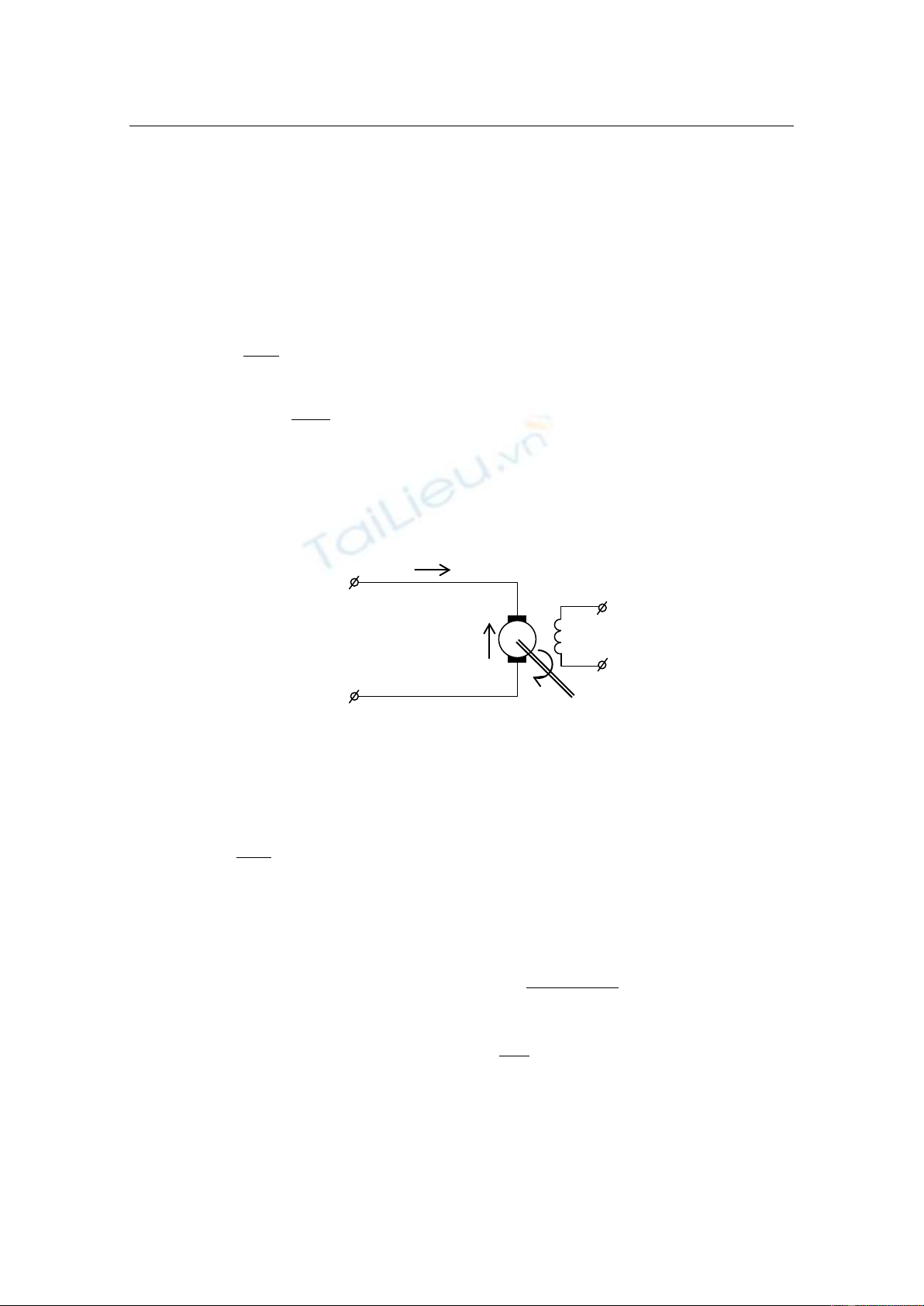
Hình 1. Sơ đồ nguyên lý động cơ một chiều kích từ độc lập
Khi phần ứng quay, dây quấn phần ứng quét qua từ thông trong máy, làm cảm ứng
trên dây quấn phần ứng một sức điện động EA
có giá trị được xác định:
ω
π
Φ= a
pN
EA2
;
ω
- tốc độ góc của rôto (2)
Phương trình cân bằng điện áp phần ứng:
AAAA IREU +
=
; RA
Trong chế độ xác lập, tốc độ góc của rô to :
– điện trở mạch phần ứng động cơ (3)
Φ
−
=
M
AAA
k
IRU
ω
(4)
Điện áp phần ứng:
dt
di
LiReu
A
AAAAA
++=
Sức điện động cảm ứng:
ω
Φ=
MA
ke
(5)
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 6(35).2009
63
k
M
Φ
Tốc độ quay: )(
1
TM mm
Jdt
d
−=
ω
(6)
Mômen quay:
AMM
ikm Φ=
(7)
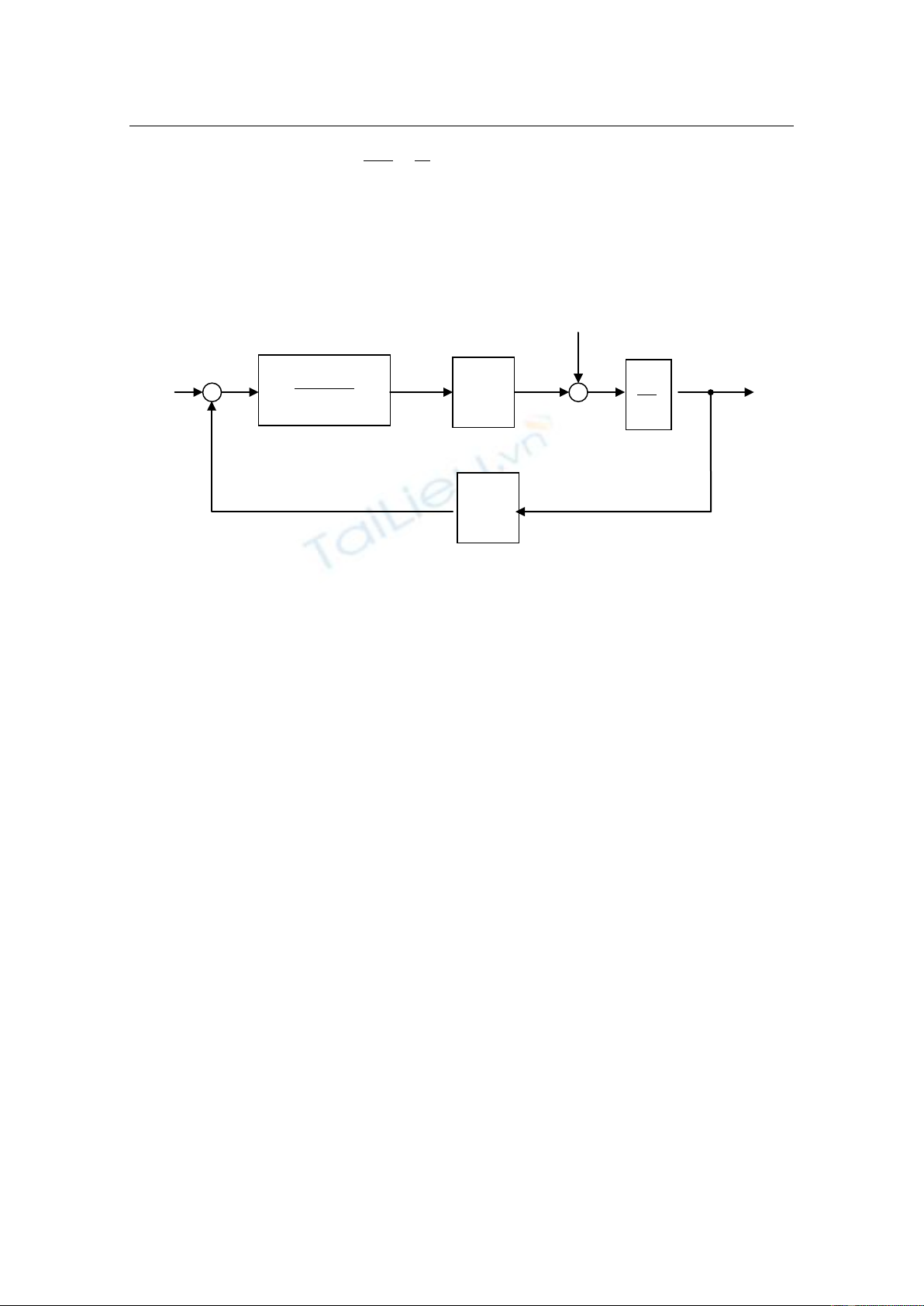
Từ các phương trình động học cơ bản của động cơ ở trên, ta xây dựng được cấu trúc
điều khiển của động cơ điện một chiều như hình 2.
Hình 2. Sơ đồ cấu trúc điều khiển động cơ một chiều kích từ độc lập
3. Giới thiệu bộ xử lý tín hiệu số DSP DS1102
Các bộ xử lý tín hiệu số DSP (Digital Signal Processor) là các bộ xử lý được
thiết kế đặc biệt cho việc thực hiện các lệnh số học. Chương trình trong các bộ điều
khiển DSP sử dụng các lệnh số học nhiều hơn các lệnh truyền dữ liệu và vào/ra, do đó
việc xử lý tín hiệu nhanh hơn các bộ xử lý thông dụng.
DS1102 là một hệ thống mạch điều khiển đơn, được thiết kế đặc biệt cho việc
phát triển các bộ điều khiển số đa biến tốc độ cao và mô phỏng thời gian thực trong các
trường hợp khác nhau.
Mạch điều khiển DSP DS1102 là một card chuẩn PC/AT mà có thể cắm vào
máy tính cá nhân bằng bus ISA như một bảng nối đa năng. Mạch điều khiển này cũng
có thể cắm vào hộp dSPACE mở rộng kết nối với máy tính chủ thông qua bus ISA mở
rộng hoặc mạng Ethernet.
Mô phỏng Simulink trong ControlDesk tương tự như làm việc với các mô hình
trong Simulink. Sự khác biệt chính ở đây là dù cho tạo ra một mô hình ban đầu hay sử
dụng một mô hình có sẵn, ControlDesk tạo ra một số bước ban đầu một cách tự động.
các bước nào bao gồm việc chèn vào các chương trình con gọi lại hoặc là chèn vào một
số khối Simulink đơn giản nếu tạo ra mô hình mới.
sT
R
A
A
+1
/1
u
A
e
A
kM
Φ
m
M
m
T
_
ω
i
A
1
Js
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 6(35).2009
64
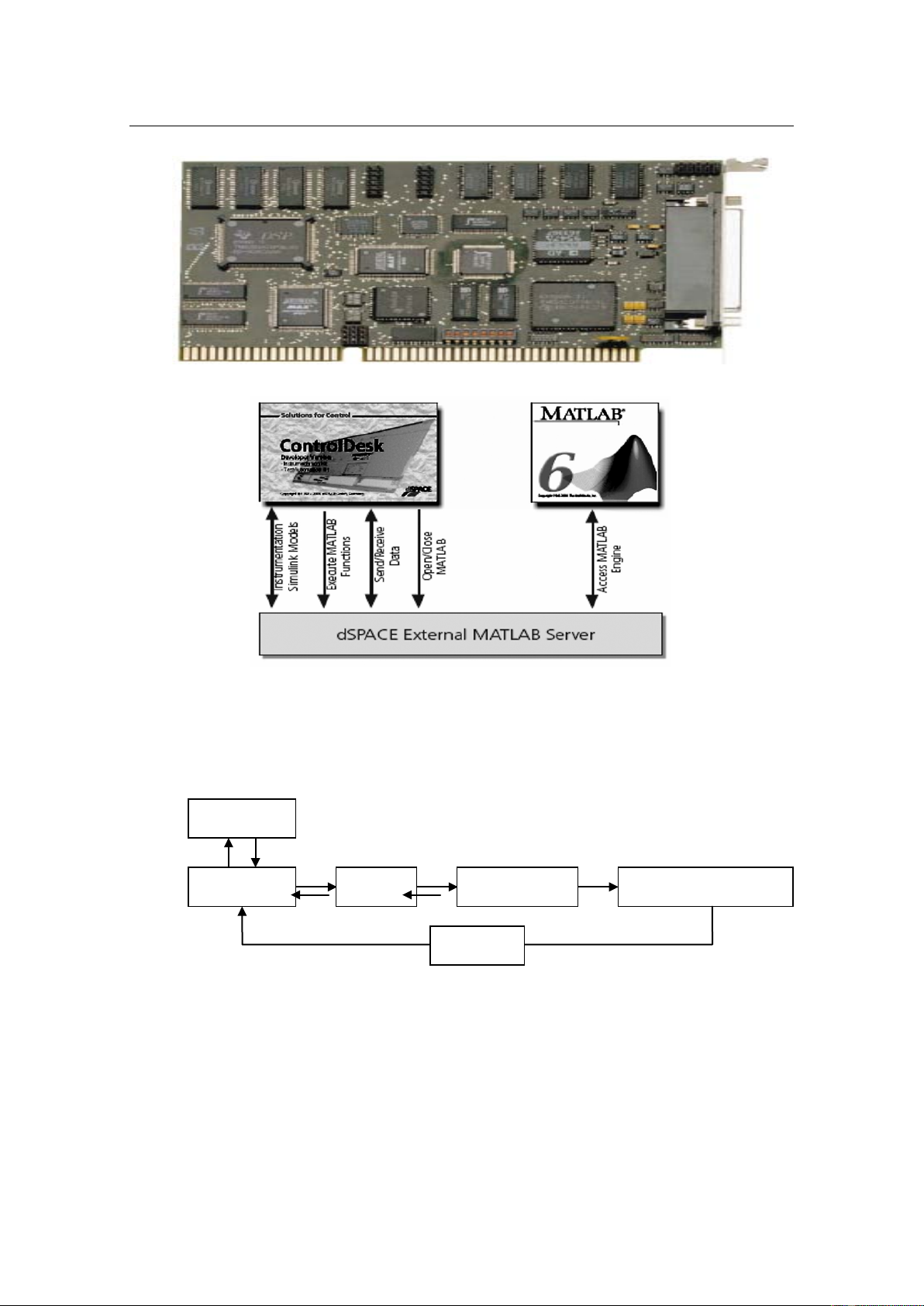
Hình 3. Hình dạng mạch điều khiển DSP DS1102
Hình 4. Giao tiếp giữa ControlDesk và Matlab/Simulink
4. Sơ đồ mô hình thực nghiệm và kết quả
Trong phạm vi bài báo, tác giả chỉ giới thiệu sơ đồ cấu trúc của mô hình thực
nghiệm hệ thống điều chỉnh tốc độ động cơ điện một chiều kích thích vĩnh cửu, được
xây dựng như hình 5.
Hình 5. Sơ đồ cấu trúc mô hình thực nghiệm
λ Khảo sát chế độ khởi động của động cơ:
Tiến hành thực nghiệm khảo sát chế độ khởi động của động cơ. Kết quả đáp ứng
dòng điện phần ứng và tốc độ của động cơ trong chế độ này thể hiện trên hình 5. Bảng
điều khiển được xây dựng nhằm mục đích mô phỏng thời gian thực hệ thống sử dụng
các bộ điều chỉnh, kiểm tra đáp ứng của hệ thống khi làm việc với thời gian thực tế.
Card DSP
DS1102
Mạch
logic
Mạch lực
Động cơ 1 chiều
Kích từ vĩnh cửu
Mạch
đo lường
Máy tính
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG - SỐ 6(35).2009
65
Để tạo ra giao diện điều khiển, trên nền làm việc của ControlDesk phải chuyển
sang chế độ làm việc Edit Mode. Trong chế độ này, thiết lập một bản thiết kế mới bằng
lệnh New-layout từ menu bar.
Các công cụ được thêm vào giao diện bằng cách chọn các công cụ thích hợp trên
nhãn Instrument Selector, vẽ khối chữ nhật trên nền layout để xác định vị trí đặt cho
công cụ.
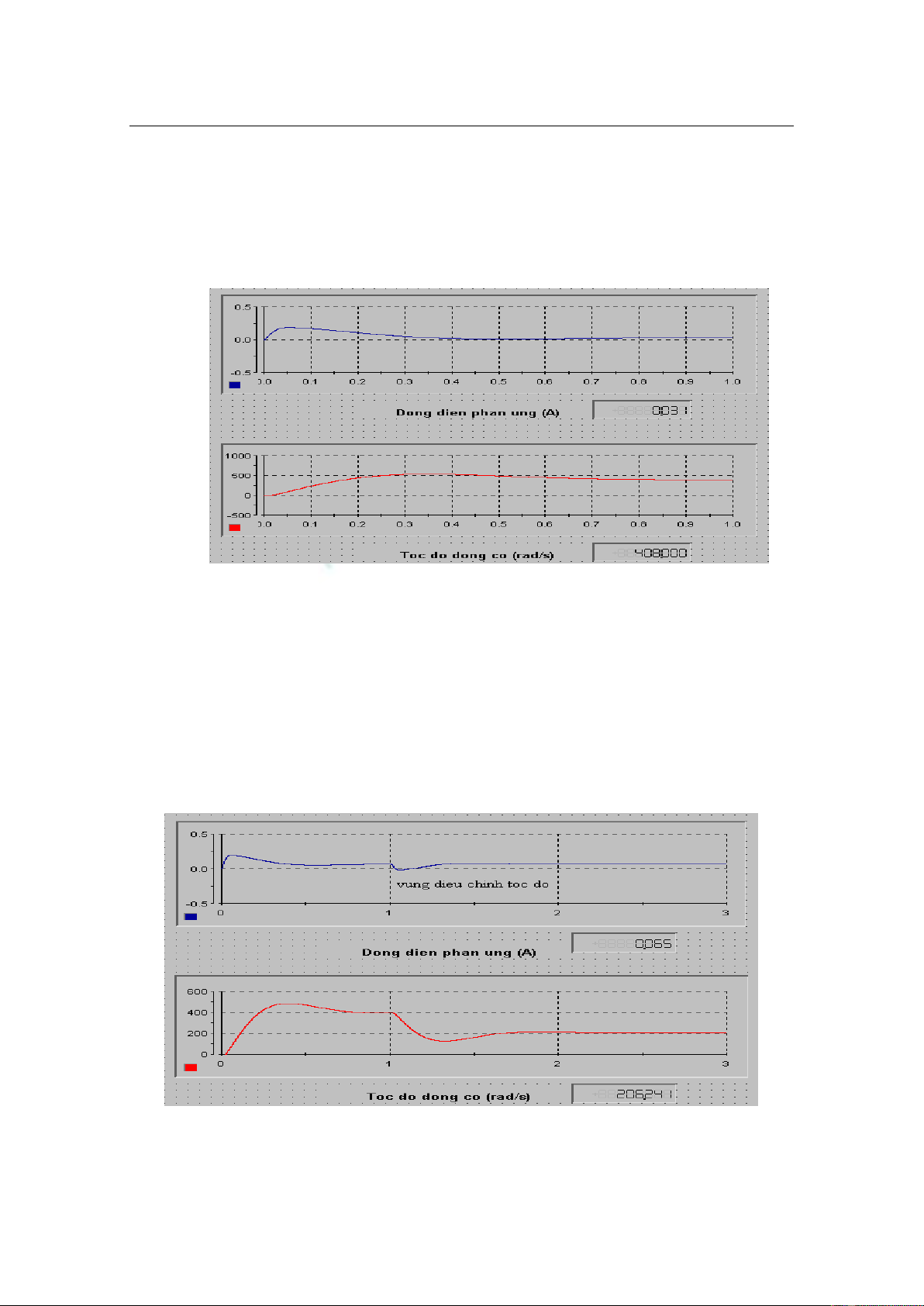
Hình 6. Kết quả thực nghiệm: đáp ứng tốc độ và dòng điện phần ứng khi khởi động động cơ
Từ kết quả trên hình 6. ta thấy trong thời gian ngắn, hệ thống đã đạt được chế độ
xác lập; các đặc tính trơn hơn so với trường hợp sử dụng bộ điều chỉnh tương tự.
• Khảo sát đáp ứng tốc độ động cơ khi thay đổi giá trị đặt tốc độ:
Để khảo sát chất lượng điều chỉnh tốc độ, ta đặt tải không đổi, điều chỉnh tốc độ
động cơ, ta có đáp ứng tốc độ và dòng điện phần ứng như trên hình 7.
Khi tiến hành điều chỉnh tốc độ động cơ, sau khoảng 1,5 giây hệ thống đạt đến
chế độ xác lập, dòng điện phần ứng không đổi, tốc độ động cơ đạt đến tốc độ đặt.
Hình 7. Kết quả thực nghiệm: đáp ứng tốc độ và dòng điện phần ứng

























