1
TRƯỜNG ĐẠI HỌC HÀNG HẢI VIỆT NAM
KHOA ĐIỆN - ĐIỆN TỬ
THUYẾT MINH
ĐỀ TÀI NCKH CẤP TRƯỜNG
ĐỀ TÀI
NGHIÊN CỨU, THIẾT KẾ, CHẾ TẠO DRIVER CÔNG SUẤT
CHO ĐỘNG CƠ ĐIỆN MỘT CHIỀU KÍCH TỪ BẰNG NAM
CHÂM VĨNH CỬU CÓ CÔNG SUẤT TỚI 1KW VỚI ĐIỆN ÁP
LÀM VIỆC LÊN TỚI 220V
Chủ nhiệm đề tài: THS. ĐỒNG XUÂN THÌN
Thành viên tham gia: THS. LÊ VĂN TÂM
THS. ĐỖ KHẮC TIỆP
Hải Phòng, tháng 4/2016

2
MỤC LỤC
MỞ ĐẦU ............................................................................................................... 3
1. Tính cấp thiết của vấn đề nghiên cứu ............................................................ 3
2. Tổng quan về tình hình nghiên cứu thuộc lĩnh vực đề tài ............................. 3
3. Mục tiêu, đối tượng, phạm vi nghiên cứu ...................................................... 4
4. Phương pháp nghiên cứu, kết cấu của công trình nghiên cứu ....................... 4
5. Kết quả đạt được của đề tài............................................................................ 4
Chương 1: Tổng quan về động cơ điện một chiều ................................................ 5
1.1. Khái niệm .................................................................................................... 5
1.2. Phân loại động cơ điện một chiều ............................................................... 5
1.3. Cấu tạo của động cơ điện một chiều ........................................................... 6
1.3.1 Cấu tạo chung ........................................................................................ 6
1.3.2 Stato ....................................................................................................... 7
1.3.3 Rôto ....................................................................................................... 8
1.4 Nguyên lý làm việc ...................................................................................... 9
1.5 Động cơ điện một chiều công suất nhỏ ....................................................... 9
1.6 Điều khiển tốc độ động cơ điện một chiều ................................................ 10
1.7 Phương pháp PWM .................................................................................... 12
1.8 Mạch cầu H ................................................................................................ 13
Chương 2: Thiết kế mạch .................................................................................... 16
2.1. Phần mềm thiết kế mạch ........................................................................... 16
2.2. Các linh kiện được sử dụng ...................................................................... 18
2.2.1 MOSFET IRF460 ................................................................................ 19
2.2.2 IC điều khiển cầu H IR2184 ................................................................ 19
2.2.3 IC logic SN7402N ............................................................................... 22
2.2.4 IC 4N35 và 6N137 .............................................................................. 23
2.3. Thiết kế mạch ............................................................................................ 23
2.3.1. Mạch nguyên lý .................................................................................. 23
2.3.2. Mạch in ............................................................................................... 26
KẾT LUẬN ......................................................................................................... 27
TÀI LIỆU THAM KHẢO ................................................................................... 28

3
MỞ ĐẦU
1. Tính cấp thiết của vấn đề nghiên cứu
Động cơ điện một chiều là đối tượng điều khiển rất quen thuộc trong lĩnh
vực điều khiển và tự động hóa. Đây là loại động cơ khá đặc biệt về cấu trúc
cũng như các phương pháp điều khiển. Ưu điểm lớn nhất của loại động cơ này
đó là việc điều chỉnh tốc độ rất đơn giản và láng. Tuy nhiên thì nhược điểm của
động cơ này cũng khá nhiều nên những người làm điều khiển muốn thay thế
chúng bởi các loại động cơ khác. Nhiều năm về trước, khoa học kỹ thuật phát
triển mạnh mẽ dẫn tới sự ra đời của biến tần khiến cho động cơ điện một chiều
công suất lớn và có điện áp công tác lớn đã gần như bị xóa bỏ và thay thế vào đó
là những cụm biến tần - động cơ điện dị bộ roto lồng sóc. Nhưng động cơ điện
một chiều công suất và điện áp nhỏ (tối đa 24V) vẫn luôn tồn tại trong điều
khiển tự động hóa vì ưu điểm vượt trội của nó. Hiện nay, nhiều thiết bị đã được
trang bị trở lại động cơ một chiều công suất lớn và có điện áp cao (lên tới
220V), dẫn tới vấn đề điều khiển và chế tạo mạch công suất phù hợp cho các
động cơ này đang là vấn đề cần được quan tâm.
2. Tổng quan về tình hình nghiên cứu thuộc lĩnh vực đề tài
Động cơ điện một chiều kích từ bằng nam châm vĩnh cửu là một loại động
cơ điện một chiều có cấu tạo tương đối đặc biệt hạn chế được các nhược điểm
của động cơ một chiều. Loại động cơ này có nhiều ưu điểm vượt trội về mặt
điều khiển so với các loại động cơ khác. Để điều khiển tốc độ của loại động cơ
này thì chủ yếu dùng phương pháp băm xung để thay đổi điện áp phần ứng cấp
vào động cơ. Hiện nay, hầu hết các động cơ điện một chiều được sử dụng mà có
nhu cầu điều chỉnh tốc độ thường là động cơ có điện áp và công suất nhỏ. Với
các động cơ có công suất lớn hơn 1KW và điện áp lớn hơn 110V thì mạch công
suất của động cơ gặp khó khăn.
Chính vì vậy nhóm tác giả lựa chọn đề tài: “Nghiên cứu, thiết kế, chế
tạo driver công suất cho động cơ điện một chiều kích từ bằng nam châm vĩnh
cửu có công suất tới 1KW với điện áp làm việc lên tới 220V”. Đề tài này sau

4
khi hoàn thiện có thể được ứng dụng trong phòng thực hành của các trường Đại
học và cao đẳng hoặc ứng dụng trong các nhà máy, xí nghiệp.
3. Mục tiêu, đối tượng, phạm vi nghiên cứu
+) Mục tiêu nghiên cứu của đề tài: Chế tạo thành công driver công suất cho
động cơ điện một chiều kích từ bằng nam châm vĩnh cửu.
+) Đối tượng nghiên cứu của đề tài: Driver công suất cho động cơ điện một
chiều kích từ bằng nam châm vĩnh cửu.
+) Phạm vi nghiên cứu: Đề tài chỉ nghiên cứu vấn đề nghiên cứu, chế tạo driver
công suất cho động cơ một chiều kích từ bằng nam châm vĩnh cửu có công suất
tới 1KW và điện áp làm việc lên tới 220V. Những vấn đề khác không được giải
quyết trong đề tài này. Cụ thể như sau:
- Nghiên cứu lý thuyết về cấu trúc động cơ điện một chiều kích từ bằng nam
châm vĩnh cửu.
- Nghiên cứu lý thuyết mạch công suất.
- Chế tạo mạch driver công suất.
- Chạy thử nghiệm và đánh giá chất lượng của sản phẩm.
4. Phương pháp nghiên cứu, kết cấu của công trình nghiên cứu
+) Phương pháp nghiên cứu:
Nghiên cứu lý thuyết rồi vận dụng vào chế tạo sản phẩm trong thực tế:
- Nghiên cứu lý thuyết động cơ điện một chiều kích từ bằng nam châm vĩnh cửu.
- Nghiên cứu phần mềm thiết kế mạch.
- Thiết kế mạch.
- Chạy thử nghiệm và nghiệm thu sản phẩm.
+) Kết cấu của công trình nghiên cứu:
Đề tài gồm có 03 phần:
Chương 1: Tổng quan về động cơ điện một chiều.
Chương 2: Thiết kế mạch.
5. Kết quả đạt được của đề tài
Chế tạo thành công mô hình thực tế, có thử nghiệm thực tế tại phòng thí
nghiệm của khoa Điện - Điện tử, trường Đại học Hàng hải Việt Nam.
5
Chương 1: Tổng quan về động cơ điện một chiều
1.1. Khái niệm
Động cơ điện một chiều là thiết bị điện quay, dùng để biến đổi năng lượng
điện một chiều thành cơ năng trên trục động cơ.
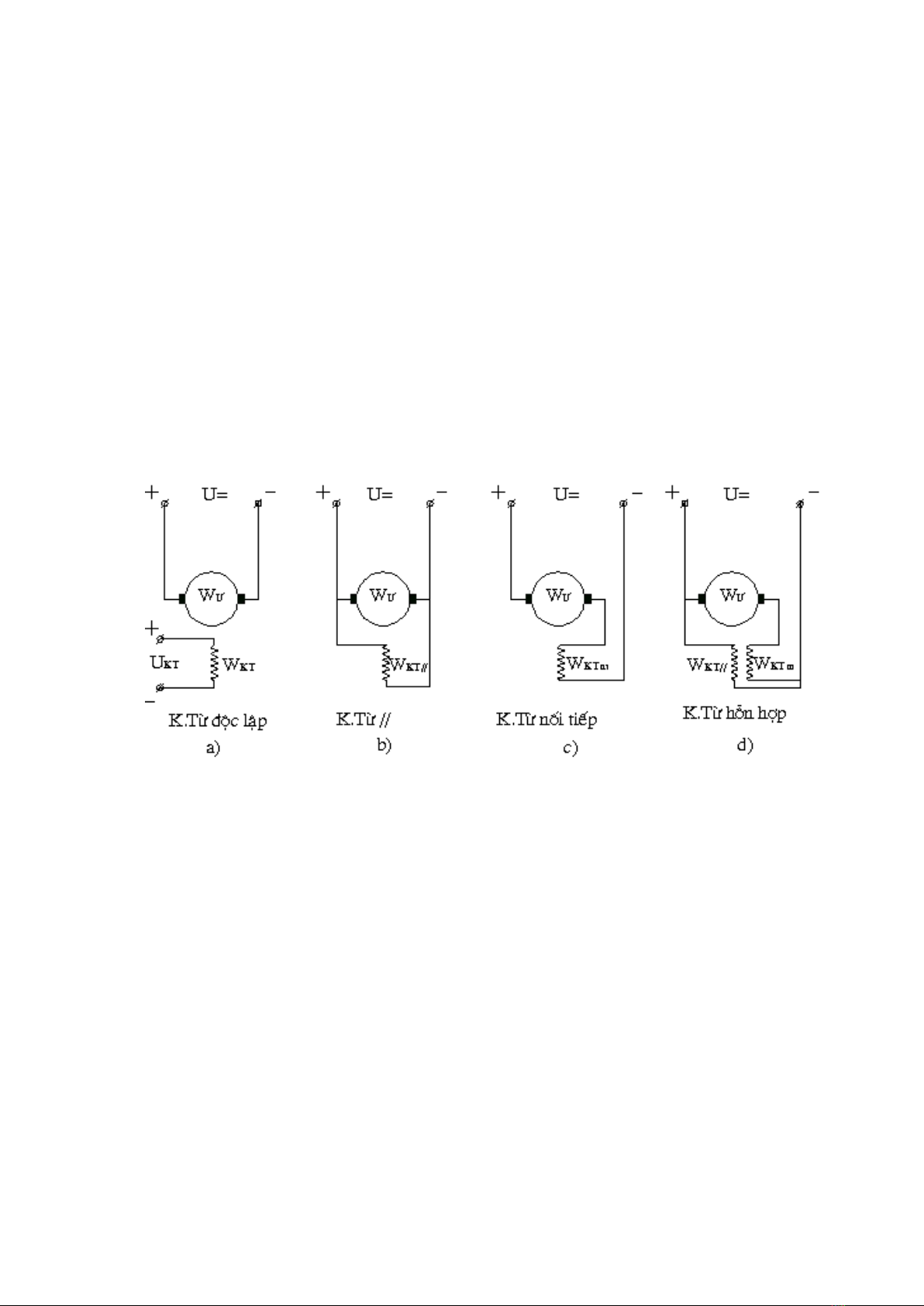
1.2. Phân loại động cơ điện một chiều
a. Theo phương pháp kích từ.
- Máy điện một chiều kích từ song song
- Máy điện một chiều kích từ nối tiếp
- Máy điện một chiều kích từ hỗn hợp
- Máy điện một chiều kích từ độc lập
Hình 1.1 Các loại động cơ điện một chiều
b. Theo tốc độ quay
- Máy điện một chiều quay với tốc độ thấp
- Máy điện một chiều quay với tốc độ trung bình
- Máy điện một chiều quay với tốc độ cao.


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)