TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
KHOA ĐÀO TẠO CHẤT LƯỢNG CAO
NGÀNH CƠ ĐIỆN TỬ
-------------------------
ĐỀ THI CUỐI KỲ HỌC KỲ I NĂM HỌC 2020-2021
Môn: KỸ THUẬT VI XỬ LÝ
Mã môn học: MICO236929
Đề số/Mã đề: 1 Đề thi có 1 trang.
Thời gian: 75 phút.
SV được tham khảo tài liệu giấy
Câu 1 (3 điểm): Cho hai vi điều khiển (VĐK) PIC16F887 giao tiếp với nhau theo chuẩn EUSART tốc bộ baud
9600. VĐK 1 giao tiếp với 2 nút nhấn "UP" và "DOWN" lần lượt qua hai chân RB0 và RB1. VĐK 2 giao tiếp
một LED bảy đoạn anode chung qua port D. Cả hai VĐK sử dụng thạch anh ngoại 20Mhz.
a. Vẽ mạch nguyên lý (1 điểm).
b. Viết chương trình cho VĐK 1 (1 điểm) và VĐK 2 (1 điểm) để nhấn nút "UP" và "DOWN" ở VĐK 1 thì sẽ
đếm lên hoặc xuống và hiển thị trên led 7 đoạn ở VĐK2. Đếm lên đến 9 sẽ quay về 0, và đếm xuống đến 0 sẽ
quay về 9.
Câu 2 (3 điểm): Một hệ thống gồm VĐK PIC16F887 giao tiếp với màn hình LCD 16x2 chip điều khiển
HD44780 thông qua portD và portE. VĐK giao tiếp với cảm biến LM35 thông qua kênh AN0. Hệ thống sử
dụng điện áp tham chiếu Vref+ = 1.5V, Vref- = 0V, độ phân giải 10 bit.
a. Lập công thức thể hiện mối liên hệ giữa giá trị số đọc từ ADC với nhiệt độ môi trường cần đo (1 điểm)
b. Viết chương trình hiển thị đầu hàng 1 của LCD giá trị Vref+ kèm đơn vị, cuối hàng 1 giá trị Vref- kèm đơn
vị. Chính giữa hàng 2 hiển thị nhiệt độ đo được (2 điểm)
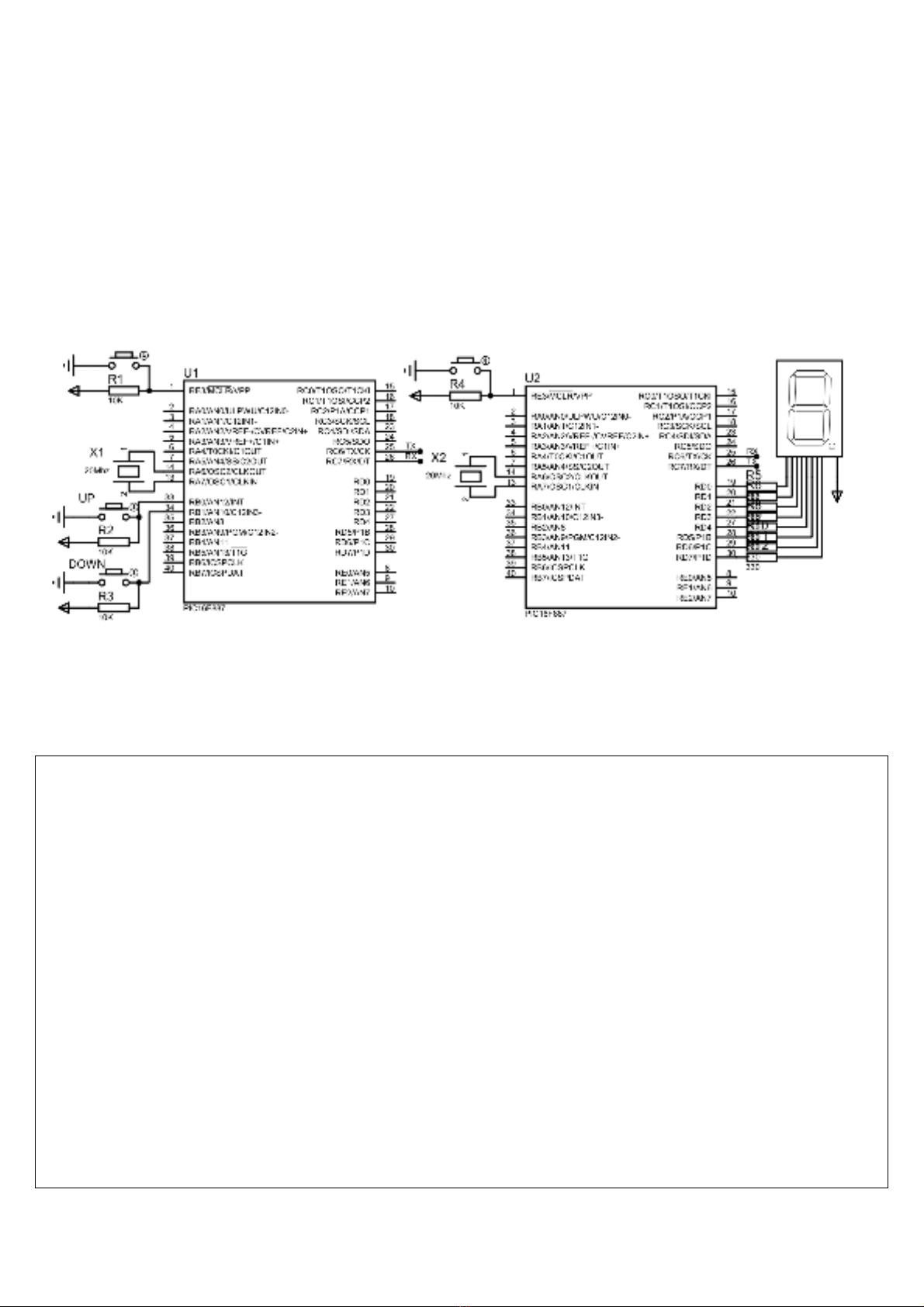
Câu 3 (4 điểm) :Một hệ thống điều khiển động cơ gồm VĐK PIC16F887 giao tiếp với động cơ DC 24V-2A
thông qua IC L298 và 1 nút nhấn UP để thay đổi tốc độ động cơ. VĐK sử dụng thạch anh ngoại 8Mhz.
a. Vẽ mạch nguyên lý (1 điểm).
b. Tính toán và hoàn thiện 2 lệnh “setup_timer_2( ? ); ”, “set_pwm1_duty( ? );” để xung PWM được tạo ra
có chu kỳ là =1ms và độ rộng xung =0.3ms. (1 điểm).
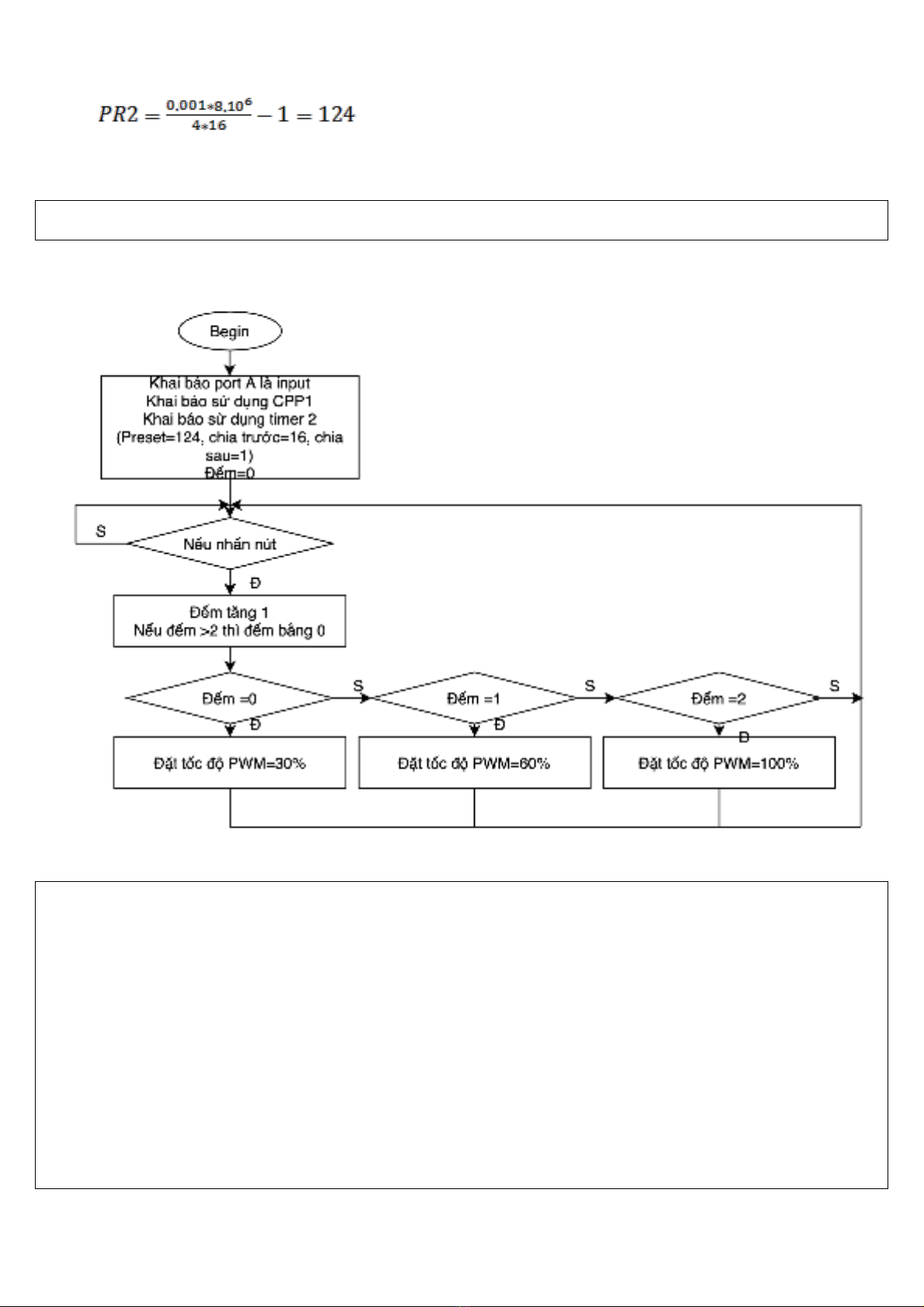
c. Vẽ lưu đồ để khi người dùng nhấn nút UP thì thay đổi tốc độ động cơ theo 3 cấp là : 30%, 60% và 100%.
Nếu tốc độ là 100% mà nhấn nữa sẽ về 30%. (1 điểm).
d. Viết chương trình để hệ thống hoạt động theo yêu cầu c (1 điểm).
Ghi chú: Cán bộ coi thi không được giải thích đề thi.
Chuẩn đầu ra của học phần (về kiến thức)
Nội dung kiểm tra
[CĐR 2.1]: Hiểu được nguyên lý, chức năng và tính toán các thông số cho các
ngoại vi như: port, ADC, Ngắt, Timer/Counter, truyền dữ liệu, điều chế độ rộng
xung; các đối tượng điều khiển như led đơn, led 7 đoạn, LCD, nút nhấn, bàn phím
ma trận, cảm biến nhiệt độ, vi mạch giao tiếp công suất để điều khiển động cơ
bước và động cơ DC.
Câu 2.a
Câu 3.a
[CĐR 2.2]: Có khả năng phân tích, viết lưu đồ, viết chương trình dùng ngôn ngữ
lập trình C để điều khiển cho từng thành phần độc lập.
Câu 1b-c
Câu 2.b
[CĐR 4.1]: Có khả năng phân tích, thiết kế phần cứng cho các hệ thống dùng vi
điều khiển và các ngoại vi.
Câu 1.a
Câu 3 b-c-d
Ngày tháng năm 2021
Thông qua Trưởng ngành
(ký và ghi rõ họ tên)
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
KHOA ĐÀO TẠO CHẤT LƯỢNG CAO
NGÀNH CƠ ĐIỆN TỬ
-------------------------
ĐỀ THI CUỐI KỲ HỌC KỲ I NĂM HỌC 2020-2021
Môn: KỸ THUẬT VI XỬ LÝ
Mã môn học: MICO236929
Đề số/Mã đề: 1 Đề thi có 1 trang.
Thời gian: 75 phút.
SV được tham khảo tài liệu giấy
Câu 1 (3 điểm): Cho hai vi điều khiển (VĐK) PIC16F887 giao tiếp với nhau theo chuẩn EUSART tốc bộ baud
9600. VĐK 1 giao tiếp với 2 nút nhấn "UP" và "DOWN" lần lượt qua hai chân RB0 và RB1. VĐK 2 giao tiếp
một LED bảy đoạn anode chung qua port D. Cả hai VĐK sử dụng thạch anh ngoại 20Mhz.
a. Vẽ mạch nguyên lý (1 điểm).
b. Viết chương trình cho VĐK 1 (1 điểm) và VĐK 2 (1 điểm) để nhấn nút "UP" và "DOWN" ở VĐK 1 thì sẽ
đếm lên hoặc xuống và hiển thị trên led 7 đoạn ở VĐK2. Đếm lên đến 9 sẽ quay về 0, và đếm xuống đến 0
sẽ quay về 9.
Chương trình cho VĐK1
#include<16f887.h>
#fuses hs
#use delay(clock=20M)
#use RS232 ( baud = 9600, xmit = pin_c6, rcv = pin_c7) // Khai báo 0.25đ
signed int8 dem=0;
void main()
{
set_tris_b(0x03);
set_tris_c(0x80);
while(true)
{
if(!input(pin_b0)) // chống dội đúng 0.25đ
{
delay_ms(20);
if(!input(pin_b0))
{
while(!input(pin_b0));
dem++;
if(dem>9) dem=0; // đúng UP 0.25đ
putc(dem);
}
}
if(!input(pin_b1))
{

delay_ms(20);
if(!input(pin_b1))
{
while(!input(pin_b1));
dem--;
if(dem<0) dem=9; // khai bao bien dem phai la kieu signed
putc(dem); // đúng down 0.25đ
}
}
}
}
Chương trình cho VĐK2
#include<16f887.h>
#fuses hs
#use delay(clock=20M)
#use RS232 ( baud = 9600, xmit = pin_c6, rcv = pin_c7)
const unsigned int8 ma7doan[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
unsigned int8 dem=0;
#int_rda
void ngatnhan()
{
dem = getc();
}
void main()
{
set_tris_c(0x80);
set_tris_d(0);
enable_interrupts(int_rda);
enable_interrupts(global);
while(true){output_d(ma7doan[dem]);}
}
Câu 2 (3 điểm): Một hệ thống gồm VĐK PIC16F887 giao tiếp với màn hình LCD 16x2 chip điều khiển
HD44780 thông qua portD và portE. VĐK giao tiếp với cảm biến LM35 thông qua kênh AN0. Hệ thống sử
dụng điện áp tham chiếu Vref+ = 1.5V, Vref- = 0V, độ phân giải 10 bit.
a. Lập công thức thể hiện mối liên hệ giữa giá trị số đọc từ ADC với nhiệt độ môi trường cần đo (1 điểm)
Với dout là giá trị số đọc về từ ADC
Vậy hoặc
b. Viết chương trình hiển thị đầu hàng 1 của LCD giá trị Vref+ kèm đơn vị, cuối hàng 1 giá trị Vref- kèm đơn
vị. Chính giữa hàng 2 hiển thị nhiệt độ đo được (2 điểm)
Chương trình
#include<16f887.h>
#fuses hs
#use delay(clock=20M)
#define LCD_RS PIN_E0

#define LCD_RW PIN_E1
#define LCD_E PIN_E2
#define OUTPUT_LCD OUTPUT_D
#include<TV_LCD.C> // Dung thu vien cua trinh bien dich cung duoc
unsigned int8 nd;
void main()
{
set_tris_a(0x0f);
set_tris_d(0);
set_tris_e(0);
lcd_setup();
lcd_command(0x80);
lcd_data("1.5V 0V");
setup_adc(adc_clock_div_32);
setup_adc_ports(san0|vss_vref);
set_adc_channel(0); delay_ms(1);
while(true)
{
nd = read_adc()/6.82;
lcd_command(0xc0+7);
sprintf(lcd_data,"%d",nd);
}
}
Câu 3 (4 điểm) :Một hệ thống điều khiển động cơ gồm VĐK PIC16F887 giao tiếp với động cơ DC 24V-2A
thông qua IC L298 và 1 nút nhấn UP để thay đổi tốc độ động cơ. VĐK sử dụng thạch anh ngoại 8Mhz.
c. Vẽ mạch nguyên lý (1 điểm).
d. Tính toán và hoàn thiện 2 lệnh “setup_timer_2( ? ); ”, “set_pwm1_duty( ? );” để xung PWM được tạo ra
có chu kỳ là = 1ms và độ rộng xung =0.3ms. (1 điểm).
T = 4(PR2 +1)*Tosc*PVT2
Chọn PVT2 =16
Hệ số chu kỳ max = (PR2+1)*4 = 500
Ton = 0.3ms tức là 30% của 1ms. Vậy nên thông số cần thiết lập cho PWM là 0.3*500 =150.
Vậy ta hoàn thiện các câu lệnh như sau:
setup_timer_2(t2_div_by_16,124,1);
set_pwm1_duty(150);
e. Vẽ lưu đồ để khi người dùng nhấn nút UP thì thay đổi tốc độ động cơ theo 3 cấp là : 30%, 60% và 100%.
Nếu tốc độ là 100% mà nhấn nữa sẽ về 30%. (1 điểm).
f. Viết chương trình để hệ thống hoạt động theo yêu cầu c (1 điểm).
Chương trình
#include<16f887.h>
#fuses hs
#use delay(clock=8M)
unsigned int8 captocdo=0;
const unsigned int16 tocdo[3] ={150, 300, 500};
void main()
{
set_tris_b(0x01);
set_tris_c(0);
setup_timer_2(t2_div_by_16,124,1);
setup_ccp1(ccp_pwm);
output_low(pin_c1);
set_pwm1_duty(0);
while(true)
{
if(!input(pin_b0))
{










![Bài giảng Tin học đại cương Trường Đại học Lâm Nghiệp [Năm mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/85781779160272.jpg)
![Giáo trình Cấu trúc dữ liệu và giải thuật - TS. Đào Thị Hường [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/49281779160273.jpg)




![Câu hỏi ôn tập Đồ hoạ máy tính [năm/khóa/chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/48771779155952.jpg)






%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)