
MỤC LỤC
PHẦN 1: NHỮNG VẤ N ĐỀ CƠ BẢ N VỀENCODER QUAY QUANG ................. 2
1. Khái niệm Encoder ............................................................................................... 2
2. Cấu tạ o cơ bả n của 1 encoder quay quang............................................................ 2
3. Phân loại................................................................................................................ 2
4. Ứng dụng của encoder quay ................................................................................. 2
PHẦN 2: ENCODER TUYỆ T ĐỐ I ............................................................................. 3
1. Cấu tạo .................................................................................................................. 3
2. Độ phân giải.......................................................................................................... 3
3. Ư u, như ợ c điể m .................................................................................................... 3
4. Cách đọ c thông sốcủa 1 encoder tuyệ t đố i .......................................................... 3
5. Cách phư ơ ng pháp mã hóa các đĩa quay .............................................................. 4
6. Cách đọ c encoder tuyệ t đố i................................................................................... 6
7. Lập trình và mô phỏng.......................................................................................... 7
PHẦN 3: ENCODER XUNG ....................................................................................... 8
1. Cấu tạo .................................................................................................................. 8
2. Độ phân giải.......................................................................................................... 8
3. Ư u, như ợ c điể m .................................................................................................... 8
4. Cách đọ c thông sốcủa 1 encoder tuyệ t đố i .......................................................... 9
5. Các loại Encoder xung.......................................................................................... 9
6. Cách mạch ứng dụng sửdụng encoder xung...................................................... 10
7. Lập trình và mô phỏng........................................................................................ 13
TÀI LIỆU THAM KHẢO .......................................................................................... 16
PHỤLỤC.................................................................................................................... 16
PHẦ N 1: NHỮ NG VẤ N ĐỀ CƠ BẢ N VỀ ENCODER QUAY QUANG
1. Khái niệ m Encoder
Là 1 loại cảm biến vị trí, đư a ra thông tin về góc quay dư ớ i dạng sốmà không
cần bộADC.Encoder quay quang còn đư ợ c gọi là bộmã hóa vòng quay.
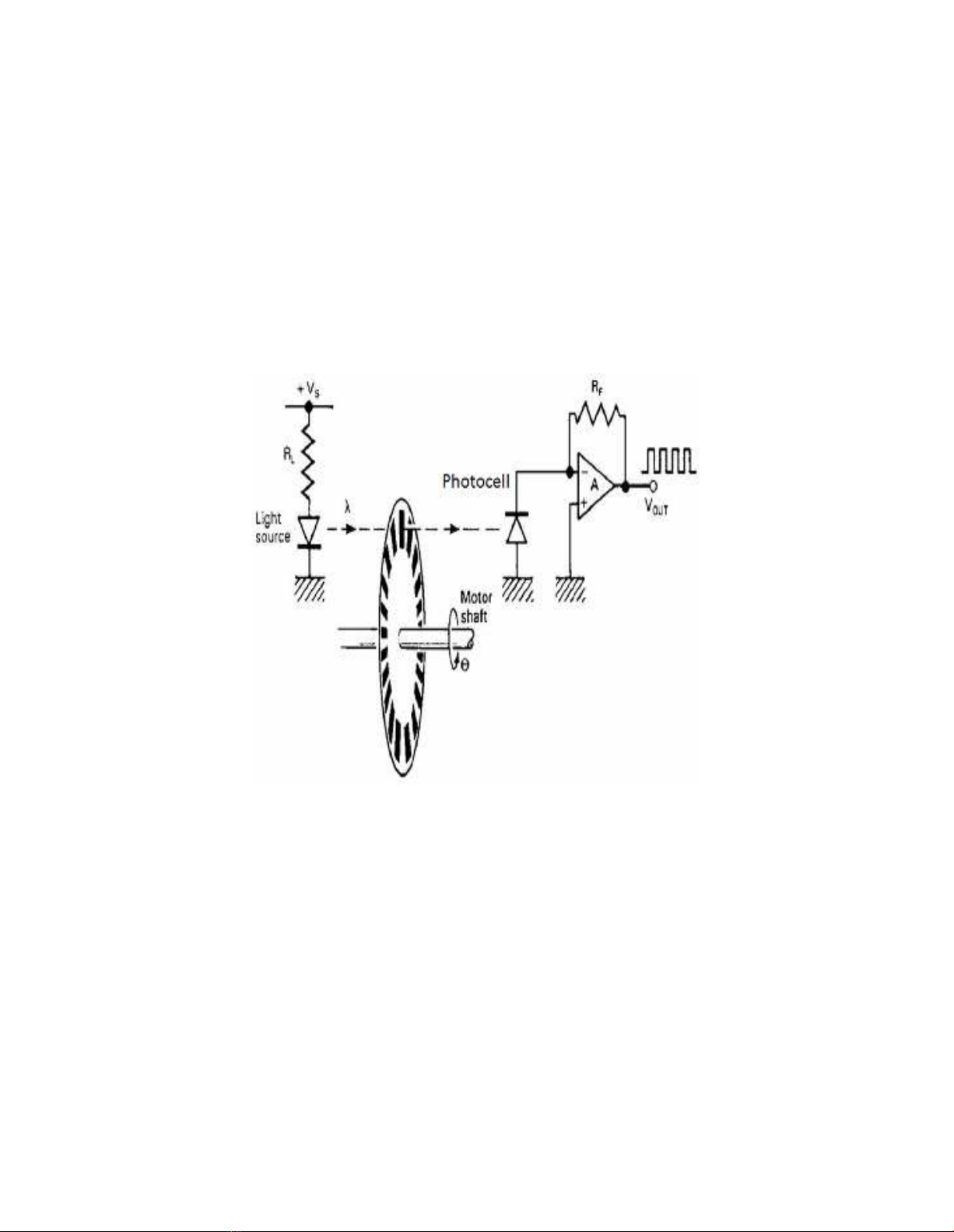
2. Cấ u tạ o cơ bả n củ a 1 encoder quay quang
-Đĩa quay đư ợ c xẻrãnh gắn vào trục.
- Một nguồn sáng và 1 tế bào quang điệ n bốtrí thẳng hàng.
- Mạch khuế ch đạ i.
3. Phân loạ i
- Encoder tuyệ t đố i (Absolute encoder): Mã nhịphân, mã gray, mã BCD
-Encoder tư ơ ng đố i (Incremental encoder): loại 1 kênh, 2 kênh
4. Ứ ng dụ ng củ a encoder quay
-Trong các bài toán đo tố c độ độ ng cơ .
-Xác đị nh khoảng dịch chuyển củ a đố i tư ợ ng thông qua xác đị nh sốvòng quay
của trục...
-Ứng dụng rỗng rãi trong nhiều lĩnh vư c: Robot, máy công cụ,hàng không vũ
trụ , …

PHẦ N 2: ENCODER TUYỆ T ĐỐ I
1. Cấ u tạ o
- Mộ t đĩa quay đư ợ c mã hóa theo các rãnhđồ ng tâm.
-Đầ u đọ c: gồm các tia sáng và các tếbào quang điệ n. Mỗi tia sáng riêng biệt
đư ợ c chiế u đế n từng rãnh cho từng tế bào quang điệ n. Mỗi tếbào quang điệ n đư a ra 1
bít cho đầ u ra số.
Ví dụ : đĩa có 8 rãnh đồ ng tâm thì đầ u đọ c có 8 tia sáng riêngbiệt và 8 tếbào
quang điệ n. Đầ u ra là đầ u ra số8 bít.
2. Độ phân giả i
Độ phân giải của encoder phụthuộc vào số bit đầ u ra.
Ví dụ: 4 bit -> 24= 16 vùng => độ phân giải: 22,50
8 bit -> 28= 256 vùng => độ phân giải: 1,40
10 bit -> 210=1024 vùng => độ phân giải: 0,350
3. Ư u, như ợ c điể m
Ư u điể m: Thông tin vị trí là đầ u ra sốvà là giá trịtuyệ t đố i. Giữ đư ợ c giá trị
góc tuyệ t đố i khi mất nguồn.
Như ợ c điể m: Giá thành cao vì chếtạo phức tạ p, đọ c tín hiệu ngõ ra khó.
4. Cách đọ c thông số củ a 1 encoder tuyệ t đố i
Ví dụ:Encoder EP50
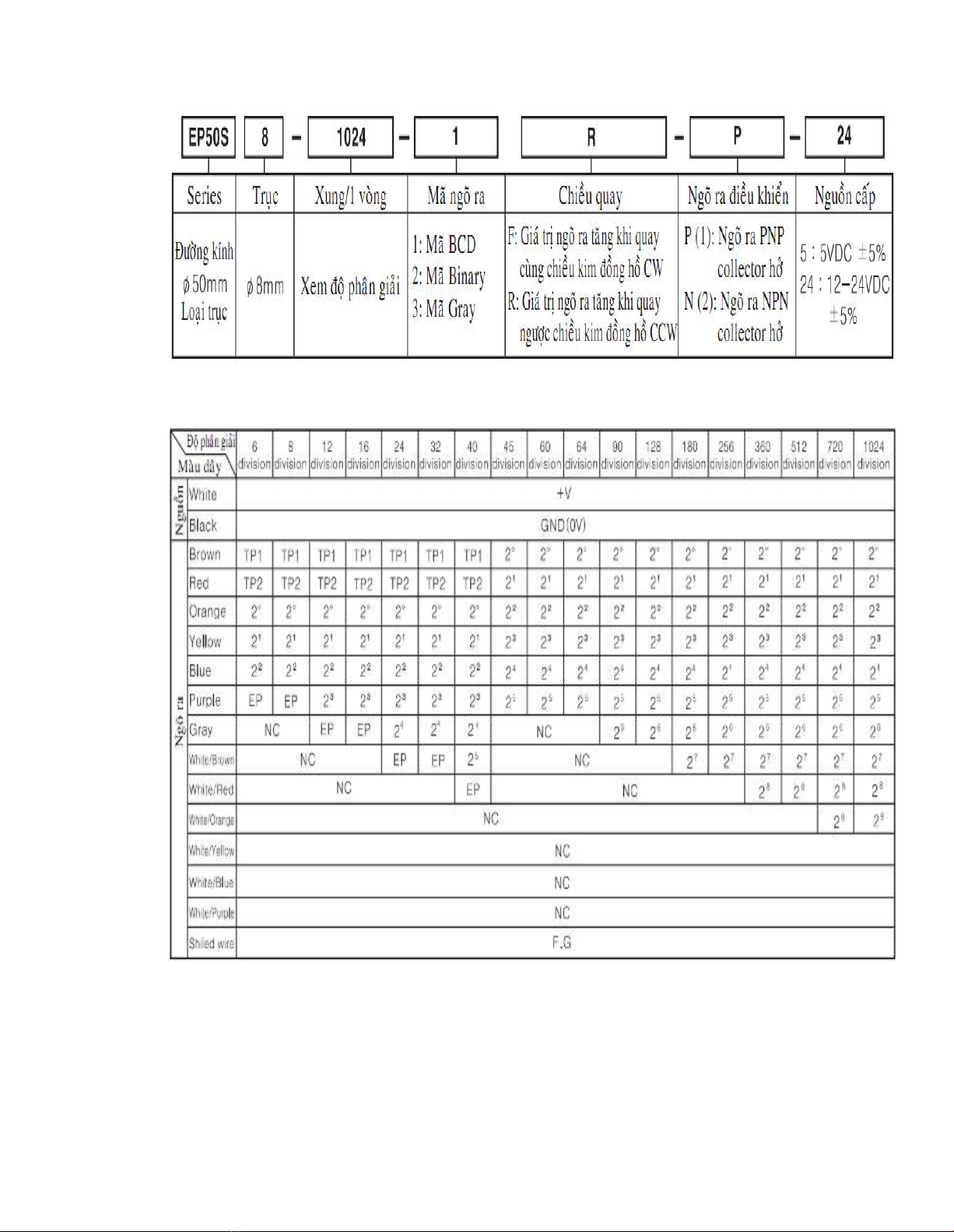
Để đạ t dư ợ c độ phân giải khác nhau thì có đấ u dây theo tài liệu kỹthuậ t đi kèm
của encoder.
5. Cách phư ơ ng pháp mã hóa các đĩa quay
a. Mã nhị phân trự c tiế p (Binary)
- Bit có trọng sốbé nhất LSB nằm ngoài cùng.
- Bit có trọng sốlớn nhất MSB nằm trong cùng.
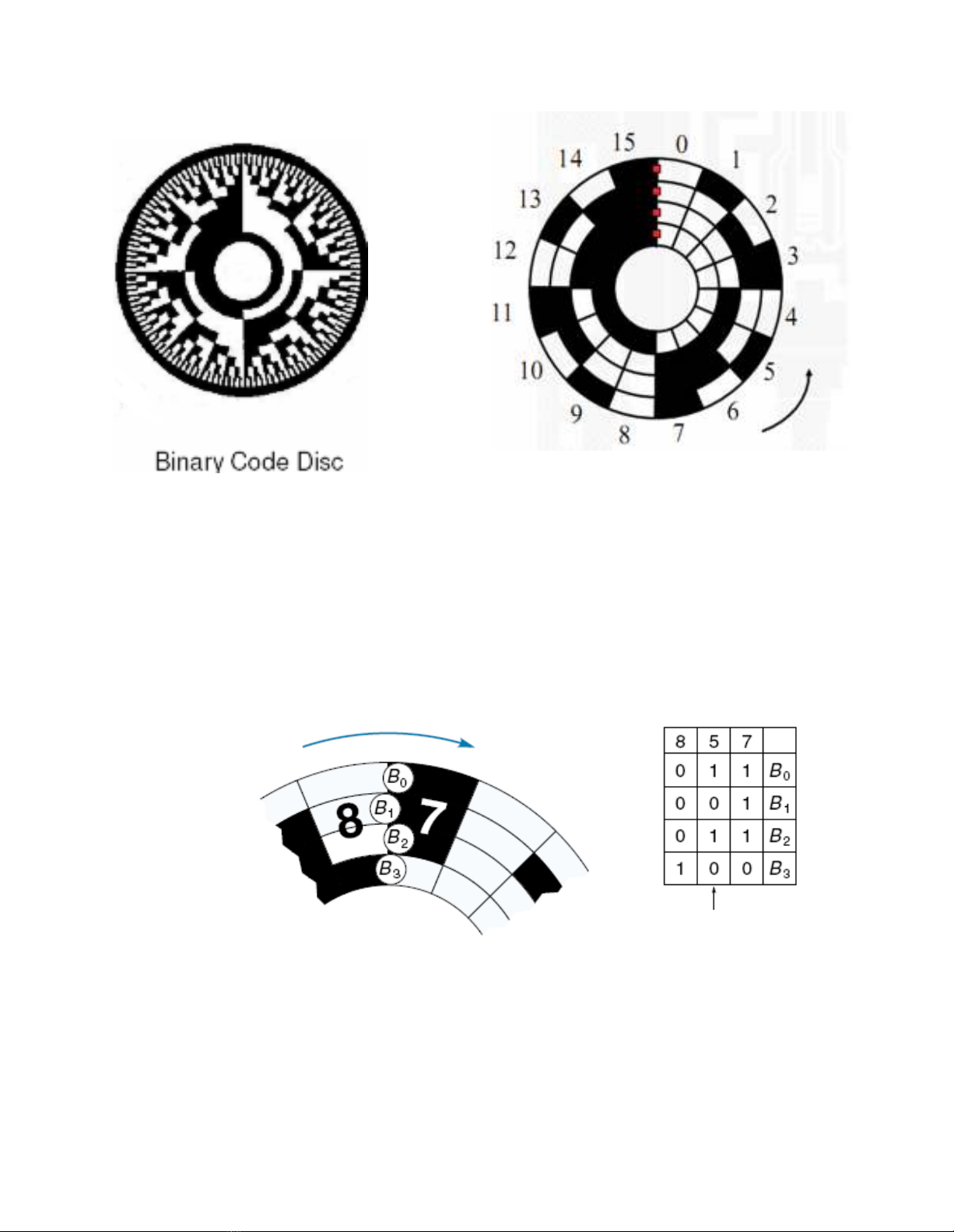
Note:
Khi sửdụng mã nhịphân trực tiếp, nế u không đư ợ c chỉ nh đị nh đúng, nó có thể
đư a ra dữ liệu hoàn toàn sai lệch.Giải pháp chống hiệ n tư ợ ng trên là sửdụng mã
Gray.
b. Mã nhị phân phả n xạ (Gray)
- Không có trọng số
- Hai vùng bất kỳliên tiếp chỉkhác nhau 1 bit.
§Üa quay
(C¸c tÕ bµo quang ®iÖn ®øng yªn)
Tr¹ng th¸i lçi


![Tài liệu kỹ thuật số: Tổng hợp [Mô tả/Hướng dẫn/Kinh nghiệm...]](https://cdn.tailieu.vn/images/document/thumbnail/2016/20160711/myanh1605/135x160/2006821314.jpg)




















![Bài giảng Tổ chức - Cấu trúc Máy tính II Đại học Công nghệ Thông tin (2022) [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250515/hoatrongguong03/135x160/8531747304537.jpg)

