- 1 -
LỜI GIỚI THIỆU
Để thực hiện biên soạn giáo trình đào tạo nghề Điện tử công nghiệp ở
trình độ Cao Đẳng Nghề và Trung Cấp Nghề, giáo trình cảm biến là một trong
những giáo trình mô đun đào tạo chuyên ngành được biên soạn theo nội dung
chương trình khung được Bộ Lao động Thương binh Xã hội và Tổng cục Dạy
Nghề phê duyệt.
Khi biên soạn, nhóm biên soạn đã cố gắng cập nhật những kiến thức
mới có liên quan đến nội dung chương trình đào tạo và phù hợp với mục tiêu
đào tạo, nội dung lý thuyết và thực hành được biên soạn gắn với nhu cầu thực
tế trong sản xuất đồng thời có tính thực tiển cao.
Nội dung giáo trình được biên soạn với dung lượng thời gian đào tạo
gồm có:
Bài 1: Bài mở đầu các khái niệm cơ bản về bộ cảm biến
Bài 2: Cảm biến nhiệt độ
Bài 3: Cảm biến tiệm cận và một số loại cảm biến xác định vị trí và
khoảng cách khác
Bài 4: Cảm biến quang điện
Bài 5: Phương pháp đo lưu lượng
Bài 6: Đo vận tốc vòng quay và góc quay
Trong quá trình sử dụng giáo trình, tuỳ theo yêu cầu cũng như khoa học
và công nghệ phát triển có thể điều chỉnh thời gian và bổ sung những kiên thức
mới cho phù hợp. Trong giáo trình, chúng tôi có đề ra nội dung thực tập của
từng bài để người học cũng cố và áp dụng kiến thức phù hợp với kỹ năng. Tuy
nhiên, tuy theo điều kiện cơ sở vật chất và trang thiết bị, các trường có thề sử
dụng cho phù hợp.
Mặc dù đã cố gắng tổ chức biên soạn để đáp ứng được mục tiêu đào
tạo nhưng không tránh được những khiếm khuyết. Rất mong nhận được đóng
góp ý kiến của các thầy, cô giáo, bạn đọc để nhóm biên soạn sẽ hiệu chỉnh
hoàn thiện hơn.
B NÔNG NGHIỆP V PHT TRIN NÔNG THÔN
TRƯỜNG CAO ĐẲNG CƠ GIỚI VÀ THỦY LỢI
GIÁO TRÌNH
KỸ THUẬT CẢM BIẾN
NGHỀ: ĐIỆN CÔNG NGHIỆP
TRÌNH Đ: CAO ĐẲNG
(Ban hành kèm theo quyết định số 546 ngày 11 tháng 8 năm 2020)
NĂM 2020

- 2 -
MỤC LỤC
ĐỀ MỤC
TRANG
LỜI GIỚI THIỆU ........................................................................................... 1
MỤC LỤC ........................................................................................................ 2
BÀI 1: KHI NIỆM CƠ BẢN VỀ CC B CẢM BIẾN .......................... 5
1.1.
Khái niệm cơ bản về các bộ cảm biến: .............................................. 5
1.2.Phạm vi sử dụng của cảm biến ...................................................... 7
BÀI 2: CẢM BIẾN NHIỆT Đ………………………………………… ..8
2.1 Đại cương ............................................................................................ 8
2.2.Nhiệt điện trở Platin và Niken .............................................................. 9
2.3.Cảm biến nhiệt độ với vật liệu Silic.................................................... 15
2.4.IC cảm biến nhiệt độ. ......................................................................... 20
2.5.Nhiệt điện trở NTC .................................................................................... 22
2.6. Các bài thực hành ứng dụng các loại cảm biến nhiệt độ .......................... 26
BÀI 3: CẢM BIẾN TIỆM CẬN V CC LOẠI CẢM BIẾN XC ĐỊNH VỊ
TRÍ, KHOẢNG CÁCH ……………………………………………….30
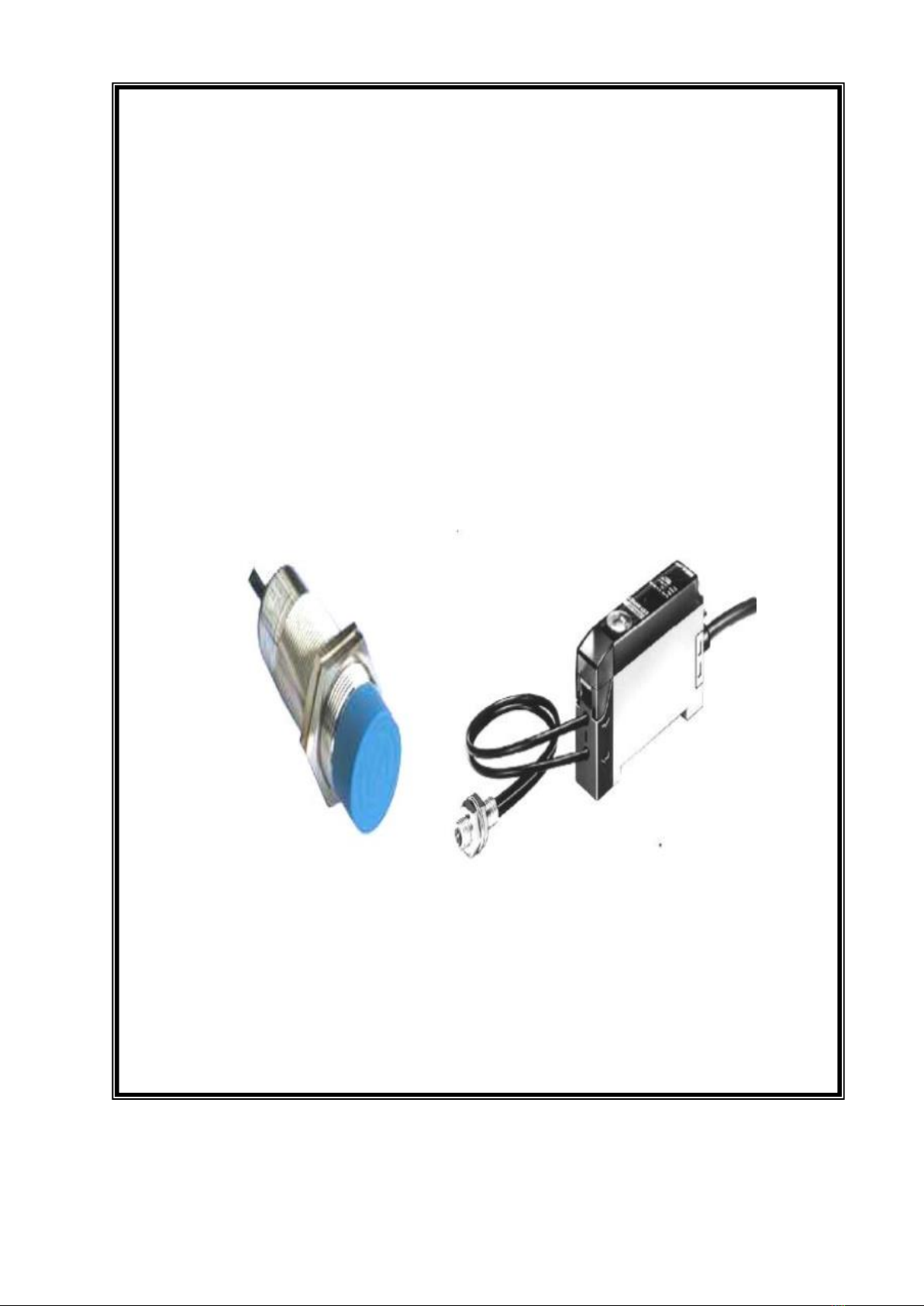
3.1.Cảm biến tiệm cận (Proximity Sensor) ............................................... 30
3.2.Một số loại cảm biến xác định vị trí, khoảng cách khác ...................... 50
3.3. Các bài thực hành ứng dụng các loại cảm biến tiệm cận..........................53
BÀI 4: CẢM BIẾN QUANG ĐIỆN ………………………………….55
4.1.Đại cương .......................................................................................... 55
4.2.Cảm biến quang loại thu phát độc lập ................................................. 63
4.3.Cảm biến quang loại phản xạ …………………………………………65
4.4.Cảm biến quang loại phản xạ khuếch tán ................................................ 68
4.5.Một số ứng dụng của cảm biến quang điện ......................................... 69
4.6.Thực hành với cảm biến quang .......................................................... 72
BÀI 5: PHƯƠNG PHP ĐO LƯU LƯỢNG …………………………...81
5.1.Đại cương ........................................................................................... 81
5.2.Phương pháp đo lưu lượng theo nguyên tắc chênh lệch áp suất ............ 84
5.3.Phương pháp đo lưu lượng bằng tần số dòng xoáy ............................... 89
5.4.Thực hành với cảm biến đo lưu lượng ................................................. 91
BÀI 6: ĐO VẬN TỐC VÒNG QUAY V GÓC QUAY…………………94
6.1.Một số phương pháp đo vận tốc vòng quay cơ bản .............................. 83
6.2.Cảm biến đo góc với tổ hợp có điện trở từ...........................................102
6.3.Thực hành với cảm biến đo vòng quay............................................... 103
- 3 -
TÀI LIỆU THAM KHẢO…….. ............................................................... ..11
- 4 -
BÀI 1: CẢM BIẾN V ỨNG DỤNG
GIỚI THIỆU
Các bộ cảm biến được sử dụng nhiều trong các lĩnh vực kinh tế và kỹ thuật,
các bộ cảm biến đặc biệt rất nhạy cảm được sử dụng trong các thí nghiệm,
các lĩnh vực nghiên cứu khoa học. Trong lĩnh vực tự động hoá người ta sử
dụng các sensor bình thường cũng như đặc biệt. Cảm biến có rất nhiều loại,
rất đa dạng và phong phú, do nhiều hãng sản xuất, giúp con người nhận biết
các quá trình làm việc tự động của máy móc hoặc trong tự động hoá công
nghiệp
.
Mục tiêu:
- Trình bày được khái niệm, đặc điểm, phạm vi ứng dụng của cảm biển.
- Rèn luyện tính cẩn thận, chính xác, logic khoa học, tác phong công nghiệp
Nội dung:
1.1. Khái niệm cơ bản về các bộ cảm biến
* Khái niệm:
Cảm biến là thiết bị dùng để cảm nhận và biến đổi các đại lượng vật lý và
các đại lượng không có tính chất về điện cần đo thành các đại lượng mang
tính chất về điện có thể đo và xử lý được
Các đại lượng cần đo (m) thường không có tính chất về điện như nhiệt độ,áp
suất,…tác động lên cảm biến cho ta một đặc trưng (s) mang tính chất điện như
điện áp, điện tích,dòng điện hoặc trở kháng chứa đựng thông tin cho phép xác
định giá trị của đại lượng đo. Đặc trưng (s) là hàm của đại lượng cần đo
(m) :
s = f(m) (1)
Người ta gọi (s) là đại lượng đầu ra hoặc là phản ứng của cảm biến,(m) là
đại lượng đầu vào hay kích thích(có nguồn gốc là đại lượng cần đo). Thông
qua đo đạc (s) cho phép nhận biết giá trị (m).
* Các đặc trưng cơ bản của cảm biến :
- Độ nhạy của cảm biến
Đối với cảm biến tuyến tính,giữa biến thiên đầu ra
∆s
và biến thiên đầu vào
∆m có sự liên hệ tuyến tính: ∆
s
= S.
∆
m
(2)
- 5 -
Đại lượng S được xác định bởi biểu
thức cảm biến.
- Sai số và độ chính xác
S
=
∆
s
∆
m
(3) được gọi là độ nhạy của
Các bộ cảm biến cũng như các dụng cụ đo lường khác, ngoài đại lượng cần
đo (cảm nhận) còn chịu tác động của nhiều đại lượng vật lý khác gây nên sai
số giữa giá trị đo được và giá trị thực của đại lượng cần đo. Gọi
x
là độ lệch
tuyệt đối giữa giá trị đo và giá trị thực x (sai số tuyệt đối), sai số tương đối
của bộ cảm biến được tính bằng :
S=
∆
x
.
100
x
, [%] (4)
Sai số của cảm biến mang tính chất ước tính bởi vì không thể biết chính xác
giá trị thực của đại lượng cần đo.
- Độ nhanh và thời gian hồi đáp
Độ nhanh là đặc trưng của cảm biến cho phép đánh giá khả năng theo kịp về
thời gian của đại lượng đầu ra khi đại lượng đầu vào biến thiên. Thời gian
hồi đáp là đại lượng được sử dụng để xác định giá trị số của độ nhanh.
Độ nhanh t r là khoảng thời gian từ khi đại lượng đo thay đổi đột ngột đến khi
khi biến thiên của đại lượng đầu ra chỉ còn khác giá trị cuối cùng một lượng
giới hạn tính bằng %. Thời gian hồi đáp tương ứng với (%) xác định
khoảng thời gian cần thiết phải chờ đợi sau khi có sự biến thiên đại lượng đo
để lấy giá trị của đầu ra với độ chính xác định trước. thời gian hồi đáp đặc
trưng cho chế độ quá độ của cảm biến và là hàm của các thông số thời gian
xác định chế độ này.
Trong trường hợp sự thay đổi của đại lượng đo có dạng bậc thang, các thông
số thời gian gồm thời gian trễ khi tăng (t
dm
) và thời gian tăng (t
m
) ứng với sự
tăng đột ngột của đại lượng đo hoặc thời gian trễ khi giảm (t
dc
) và thời gian
giảm (t
c
) ứng vơi sự giảm đột ngột của đại lượng đo. Khoảng thời gian trễ khi
tăng (t
dm
) là thời gian cần thiết để đại lượng đầu ra tăng từ giá trị ban đầu của
nó đến 10% của biến thiên tổng cộng của đại lượng này và khoảng thời gian
tăng (t
m
) là thời gian cần thiết để đại lượng đầu ra tăng từ 10% đến 90% biến
thiên tổng cộng của nó.
Tương tự khi đại lượng đo giảm, thời gian trễ khi giảm (t
dc
) là thời gian cần
thiết để đại lượng đầu ra giảm từ giá trị ban đầu của nó đến 10% biến thiên
tổng cộng của đại lượng này và khoảng thời gian giảm (t
c
) là thời gian cần
thiết để đại lượng đầu ra giảm từ 10% đến 90% biến thiên tổng cộng của nó.
Các thông số về thời gian (t r ) ,(t dm ) ,(t m ) ,(t dc ) ,(t
c
) của cảm biến cho phép
ta đánh giá về thời gian hồi đáp của nó.
























![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)