See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/288218298
The rolling resistance and tractive performance of a small agricultural tractor
with different surface and moisture conditions on Bangkok clay soil
Article · January 2014
CITATIONS
2
READS
4,894
4 authors, including:
Jannatul Ferdous
BRAC University
5 PUBLICATIONS66 CITATIONS
SEE PROFILE
Peeyush Soni
Indian Institute of Technology Kharagpur
166 PUBLICATIONS3,065 CITATIONS
SEE PROFILE
Madhav D Gholkar
23 PUBLICATIONS128 CITATIONS
SEE PROFILE
All content following this page was uploaded by Madhav D Gholkar on 19 January 2021.
The user has requested enhancement of the downloaded file.

1
___________________________________________________________________________________________________________
The authors are solely responsible for the content of this technical presentation. The technical presentation does not necessarily reflect
the official position of the International Society for Terrain Vehicle Systems (ISTVS), and its printing and distribution does not constitute
an endorsement of views which may be expressed. Technical presentations are not subject to the formal peer review process by ISTVS
editorial committees; therefore, they are not to be presented as refereed publications. Citation of this work should state that it is from an
ISTVS meeting paper. EXAMPLE: Author's Last Name, Initials. 2014. Title of Presentation. The 18th International ISTVS Conference
Seoul, Korea. For information about securing permission to reprint or reproduce a technical presentation, please contact ISTVS at 603-
646-4405 (72 Lyme Road, Hanover, NH 03755-1290 USA)
___________________________________________________________________________________________________________
Proceedings of the 18th International Conference of the ISTVS 2014
THE ROLLING RESISTANCE AND TRACTIVE PERFORMANCE OF A SMALL
AGRICULTURAL TRACTOR WITH DIFFERENT SURFACE AND MOISTURE
CONDITIONS ON BANGKOK CLAY SOIL
Jannatul Ferdousa, Peeyush Sonia, Madhav D. Gholkara, Alex Keenb
aAgricultural Systems and Engineering Dept., Asian Institute of Technology, Pathumthani, Thailand.
bSchool of Engineering and Technology, Kaziranga University, Jorhat, India.
corresponding author: alexkeen@blueyonder.co.uk
________________________________________________________________________________________________
Abstract
Cultivations in paddy fields can take place with a wide range of surface conditions and soil moisture which can have
a considerable effect on tractive performance and the maximum tractive efficiency that can be achieved. The aim of
this research was to investigate the rolling resistance and tractive performance of a small agricultural tractor of 18.7 kW
and 0.99 tonnes operating in two wheel drive (2WD) and four wheel drive (4WD) on Bangkok clay soil under different
surface and moisture conditions. The four surface and moisture conditions were bare and grass surfaces on soft plastic
soil and bare and grass surfaces on hard plastic soil. Torque transducers were fitted to each wheel to measure the
longitudinal wheel forces. Wheel slip and drawbar pull were also measured enabling rolling resistance and tractive
efficiency to be determined. Experiments were conducted at the agricultural fields and laboratories of the Agricultural
Systems and Engineering department, Asian Institute of Technology, Thailand. The highest rolling resistance was
observed in 2WD on soft plastic soil with a bare surface, and the lowest rolling resistance was in 4WD on hard plastic
soil with a grassy surface. At the same wheel slip, wheel thrust and drawbar pull were highest in 4WD on hard plastic
soil, and the lowest thrust was in 2WD on soft plastic soil. The highest maximum tractive efficiency was 62% in 4WD
on the hard plastic soil with a grassy surface, and the lowest maximum tractive efficiency was 24% in 2WD on the soft
plastic soil with a bare surface.
Keywords: traction, rolling resistance, wheel thrust, drawbar pull, tractive efficiency, wheel torque sensors, Bangkok clay
________________________________________________________________________________________________
1. Introduction
Traditional intensive lowland rice production is
carried out in flooded conditions and to enable primary
cultivation with small two and four wheel tractors this
cultivation is usually carried out after field flooding. As
Salokhe [1] has stated, the performance of pneumatic
tyres decreases as the moisture content increases and
becomes very poor in flooded soil. Problems of tractors
fitted with pneumatic tyres in wetland conditions
include tractors becoming stuck, breaking through the
hardpan and the blocking of tyre treads which takes
place particularly in sticky soil conditions. Cage
wheels are an effective traction aid in wetland
conditions [2] where the tractive performance is
increased by cutting through soft soil in the plough
layer and getting better grip and traction on the harder
compacted soil in the hardpan [3] but they can also
have the effect of increasing the depth of the hardpan
[4]. Tanaka [3] states that on surface conditions where
there is no hardpan strong enough to support the
vehicle, immobilization may take place requiring
vehicles to operate with less ground contact pressure
by using tracks or floats. As moisture content
increases, soil strength reduces and cultivation forces
become less but traction becomes more difficult,
tractive efficiency reduces and soil damage and long
term soil sustainability becomes more problematic [5].
The majority of existing models for the prediction
of the tractive performance of driven wheels relate to
soil moisture conditions up to a plastic state but not for
saturated soil [6]. Also, there is little published
research that considers tractive performance in the
context of soil management in lowland intensive rice
production and long term sustainable soil use, the
2
Proceedings of the 18th International Conference of the ISTVS 2014
energy inputs required and the environmental impact
[5]. Evans et al. [7] have stated that a vehicle’s fuel
economy is influenced by tyre rolling resistance, and,
therefore, it is important to have a stronger
understanding of tire rolling resistance for improving
efficiency and thereby fuel saving in farm operations.
Energy consumption of tractors depends on tractive
performance and prevailing field conditions.
Quantification of tractive efficiency and tractive
performance is part of increasing understanding and
making improvements. Furthermore, as field surface
conditions greatly determine the system performance
of off-road wheeled and tracked vehicles, it is
important to include the contribution of soil surface
condition. Upadhyaya et al. [8] identified that the
changes in soil conditions influence tyre performance
much more than changes in tyre loading and
dimensions.
To specifically address the need of having clearer
insight on a farm tractor’s response to prevailing field
surface conditions, the aim of this research was to
investigate and evaluate tractive performance of a
small agricultural tractor of 18.7 kW and 0.99 tonnes in
2WD and 4WD operating on Bangkok clay soil when
the soil is in a plastic state and before soil moisture
increases to a more problematic sticky soil state, and
includes the effect of surface condition. The specific
objectives reported here were to:
a) measure the actual rolling resistance from field tests.
b) compare the coefficients of rolling resistance to
those derived from existing models.
c) evaluate the tractive efficiency of a small 18.7 kW
agricultural tractor under various surface conditions
and soil moisture contents.
2. Material and Methods
2.1. Rolling Resistance and Tractive Performance
Measurement
Hall and Moreland [9] define tire rolling resistance
as the energy consumed per unit distance of travel as a
tire rolls under load. Rolling resistance can be
measured from the difference between wheel gross
thrusts measured at the wheels and net thrusts
measured as drawbar pull. Wheel thrust measurement
required recording the torque value in each of the four
wheels. Drawbar pull was measured by a load cell
attached to the drawbar of the test tractor (a Kubota
L2050) and pulling through this load cell a ‘loading’
tractor (a Kubota L345II). Measurement of wheel slip
required the actual travel speed and the theoretical
travel speed of the slipping wheels. For this, a rotation
position sensor was attached to each wheel of the test
tractor to measure its wheel rotation speeds and a
dynamo was mounted on the front wheel of the loading
tractor to measure the actual travel speed. The
coefficient of rolling resistance (CRR), calculated from
the test data, was compared with existing empirical
models (see Table 1). The coefficient of rolling
resistance was calculated from test data using the
following expression:
CRR = RR/ W (1)
Where:
CRR = coefficient of rolling resistance, RR =
rolling resistance (N), W = Vertical load (N)
Tractive performance of the test tractor was
computed as tractive efficiency (TE) and net traction
ratio (NTR) by using the following expressions:
⁄
⁄
(
)
(2)
Where:
NT = Net traction; Wd = Dynamic weight; GT = Gross
traction; Va = Actual travel speed; Vt = Theoretical
travel speed; NTR = Net traction ratio; and GTR =
Gross traction ratio.
During the tests, tire inflation pressures for both
rear and front wheels were kept constant at 100 and
200 kPa, respectively; and no extra load was added on
drive axle. The tests were replicated three times in both
2WD and 4WD under all the test conditions.
Dynamic loads on the front and rear tyres were
determined for the NTR calculation using the
expressions given by Evans et al. [13]:
(3)
(4)
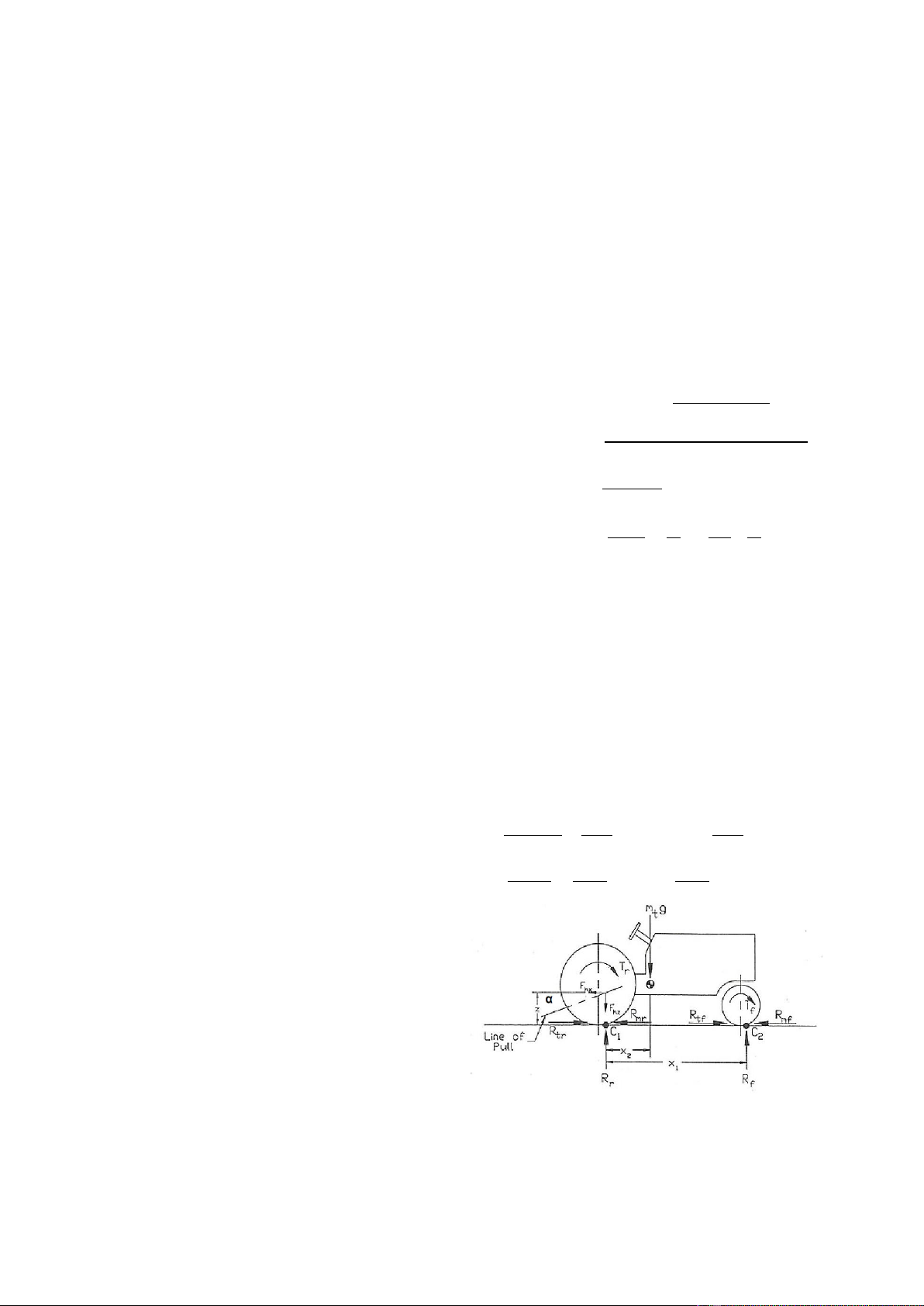
Fig. 1. Dynamic forces acting on a tractor pulling an
implement, from Evans et al. [13]( α=0 in these tests)
Where:
Rro= static rear wheel reaction, kN; Rfo= static front
wheel reaction, kN; Rmi= motion resistance force, kN;
3
Proceedings of the 18th International Conference of the ISTVS 2014
Rti= traction force, kN; Rr= dynamic vertical reaction
on rear wheels, kN; Rf= dynamic vertical reaction on
front wheels, kN; Fhx= horizontal component of
drawbar pull, kN; Fhz= vertical component of drawbar
pull, kN; mt= tractor mass (Mg); g = acceleration of
gravity; x1= wheelbase, mm; x2= distance between the
rear axle centre to vehicle centre of gravity, mm; z =
distance from ground to intersection of Rr with line of
pull, mm; i = f (front wheel) r (rear wheel): α=0 (line of
pull was horizontal).
Table 1. Empirical models for estimating coefficient of rolling resistance
Empirical
model
Developed for specific
surface
Coefficient of
Rolling Resistance
(CRR)
Mobility Number (M or
Bn) used in the model
Wismer and
Luth [10]
Bias ply agricultural tyres for
agricultural soil
(
)
Gee-Clough
[11]
Agricultural soil
(
)
Brixius [12]
soil
Bn
S
Bn
5.01
(
)(
)
Evans et al.
[13]
Grass surface
(
)(
)
Where: CI = Cone Index (kPa); b = Tire width (m); d = Tire diameter (m); W=Vertical load (kN);
δ = Deflection (m); and h = Section height (m): S=wheel slip.
2.2 Tractor Instrumentation
An 18.8 kW tractor (a Kubota L 2050) was used as
the test tractor and a 25.5 kW tractor (a Kubota L 345
II DT) was used as the loading tractor. The test tractor
was instrumented with strain gauge based torque
transducers which included load cells for measuring
torque and slip rings for carrying signals through the
rotating wheel, and wheel position sensors to measure
the wheel rotation speed. A load cell was used to
measure the drawbar pull.
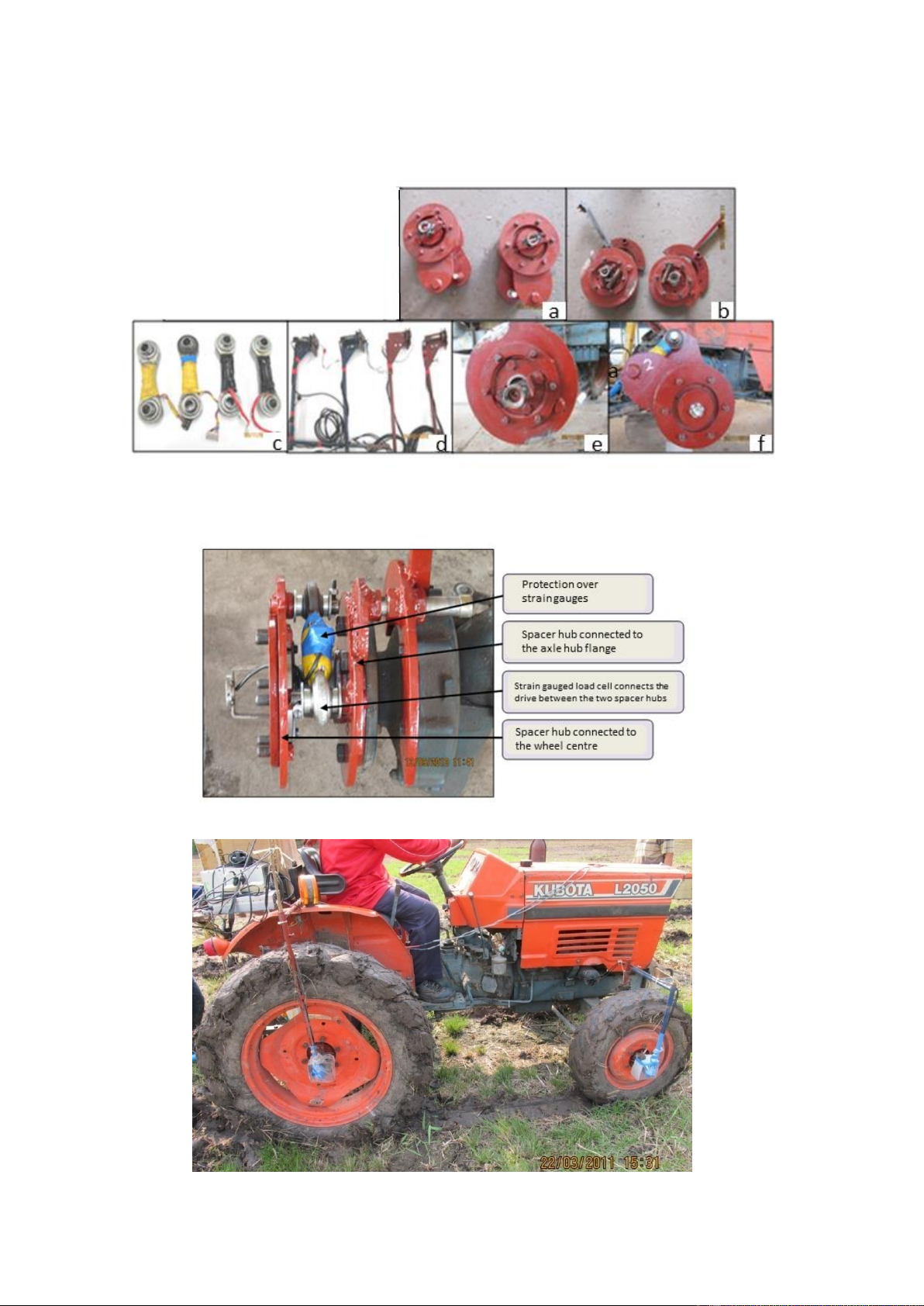
2.2.1 Torque Measurement
Four strain gauge based transducers, designed by
Keen et al.[14], were used to measure the wheel
torque. Transducer load cells were mounted at the
wheel centre by using spacer hubs, which allowed
uninterrupted power transmission through each wheel
while simultaneously measuring torque. The
arrangement of spacer hubs on the tractor wheel is
shown in Fig. 2 and the instrumented tractor is shown
in Fig. 3. The transducers used a full Wheatstone
bridge circuit formed by the four strain gauges and the
voltage output was proportional to torque input.
The torque transducers were calibrated in the
laboratory. All static calibrations showed high linearity
of the measurements with correlation coefficients
approaching unity. Calibration equations for all four
transducers were individually obtained by the least
squares method.
2.2.2 Wheel slip measurement
Wheel slip (S), was calculated by:
(5)
Where: S= Slip; = Theoretical travel speed;
= Actual travel speed
Rotary optical encoders (Figure 4) were used to
measure the actual rotations of each of the four wheels
of the test tractor as recommended by Lee and Kim
[15]. Wheel rotation was converted into digital square
pulses by rotary encoders, the data were then post
processed using routines written in MathCAD. Linear
distance per pulse was calculated from overall distance
travelled during calibration runs. From the distance per
pulse, the rolling radiuses of all four wheels were
calculated for calibration of the speed sensor optical
encoder by the following relationship:
therefore,
4
Proceedings of the 18th International Conference of the ISTVS 2014
Fig. 1. Components of the torque measurement device:(a) and (b) transducer arrangements for rear and front wheels; (c)
transducers; (d) full sets of optical encoders and slip rings; (e) and (f) front and rear wheel arrangements on the
tractor without wheel fitted.
Fig. 2. Arrangement of torque transducer on to the test tractor axle
Fig. 3. Instrumented test tractor









![Sổ tay vườn rau dinh dưỡng: Tài liệu hướng dẫn kỹ thuật [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2018/20181026/hanhtran9691/135x160/176343720.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)