
THIẾT KẾ TỐT NGHIỆP
- 1 -
NHIỆM VỤ
THIẾT KẾ TỐT NGHIỆP
I. Đầu đề thiết kế tốt nghiệp:
Thiết kế hệ thống truyền động Thyriotor
Động cơ một chiều cho máy doa ngang 2620, truyền động ăn dao
II. Các số liệu ban đầu:
Động cơ 1 chiều kích từ độc lập: Uđm = 220v , Pđm = 2,7 Kw, dđm =
1500V/ph, PO = 4% Pđm, ηđm = 0,86.
Lưới đơn xoay chiều 220/380V - 50Hz
Dải điều chỉnh tốc độ 1:1000
Sai số điều chỉnh tốc độ s%= 5%.
III. Nội dung các thuyết minh và tính toán;
1/ Giới thiệu các phương pháp điều chỉnh tốc độ động cơ một chiều
2/ Khái quát các phương án chỉnh lưu dòng dùng Thyristor
3/ Tính chọn các thông số của sơ đồ mạch lực
4/ Thiết kế mạch điều khiển Thyristor vòng hở
5/ Thiết kế mạch điều khiển hệ kín theo phương pháp 2 mạch vòng tối ưu
moodul.
IV. Các bản vẽ đồ thị:
05 bản vẽ Ao
PHẦN I: KHÁI QUÁT MÁY DOA NGANG 2620,
TRUYỀN ĐỘNG ĂN DAO

THIẾT KẾ TỐT NGHIỆP
- 2 -
I. KHÁI NIỆM
Máy cắt kim loại được dùng để gia công các chi tiết kim loại bằng cách cắt
bớt các lớp kim loại thừa, để sau khi gia công chi tiết có hình dáng với độ chính xác
nhất định về kích thước và độ bóng cần thiết của bề mặt gia công
Máy doa ngang là 1 phần loại máy cơ bản của máy cắt gọt kim loại.
II. MÁY DOA NGANG
Máy doa ngang dùng để gia công với các nguyên công: khoét lỗ trụ, khoan
lỗ, có thể dùng để phay. Thực hiện các nguyên công trên máy doa sẽ đạt độ chính
xác và độ bóng cao.
Máy doa ngang dùng để gia công các chi tiết cỡ trung bình và nặng. Hình
dạng của máy được mô tả như sau:
Trên bệ máy 1 đặt trụ trước 6, trên đó có ụ trục chính 5. Trụ sau 2 có đặt giá
đỡ 3 để giữ trục dao trong quá trình gia công. Bàn quay 4 gá chi tiết có thể dịch
chuyển theo chiều ngang hoặc dọc bộ máy. Ụ trục chính có thể chuyển động theo
chiều thẳng đứng cùng trục chính. Bản thân trục chính có thể chuyển động theo
phương ngang.

THIẾT KẾ TỐT NGHIỆP
- 3 -
Chuyển động chính là chuyển động quay của dao doa (trục chính) chuyển
động ăn dao có thể là chuyển động ngang, dọc của bàn máy mang chi tiết hay di
chuyển dọc của trục chính mang đầu dao.
III. YÊU CẦU ĐỐI VỚI MÁY DOA
1.. Truyền động chính:
Yêu cầu cần phải đảo chiều quay, phạm vi điều chỉnh tốc độ D = 130/1 với
công suất không đổi, độ trơn điều chỉnh ϕ = 1,26. Hệ thống truyền động chính cần
phải hãm dừng nhanh.
Hiện nay hệ truyền động chính máy doa thường sử dụng động cơ không đồng
bộ Roto lồng sóc và hộp tốc độ, Ở những máy doa cỡ nặng có thể sử dụng động cơ
điện 1 chiều, điều chỉnh tốc độ trơn trong phạm vi rộng.
2.. Truyền động ăn dao:
Phạm vi điều chỉnh của truyền động ăn dao D = 1500/1.
Lượng ăn dao được điều chỉnh trong phạm vi 2mm/ph ÷ 600mm/ph. Khi di
chuyển nhanh có thể đạt tới 2,5m/ph ÷ 3m/ph.
Lượng ăn dao (mm/ph) ở những máy cỡ nặng yêu cầu được giữ không đổi
khi tốc độ trục chính thay đổi.
Đặc tính cơ cần có độ cứng cao, với độ ổn định tốc độ <10%, hệ thống
truyền động ăn dao phải đảm bảo độ tác động nhanh cao, dừng máy chính xác đảm
bảo sự liền động với truyền động chính khi làm việc tự động.
PHẦN II - CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ 1 CHIỀU.
I. KHÁI NIỆM CHUNG:
Điều chỉnh tốc độ truyền động điện là dùng các phương pháp thuần tuý điện,
tác động lên bản thân hệ thống truyền động điện để thay đổi tốc độ quay của trục
động điện.
THIẾT KẾ TỐT NGHIỆP
- 4 -
Khi thay đổi tốc độ quay của tải và gián tiếp thay đổi qua các tốc độ quay
động cơ, người ta xây dựng nên đặc tính ω = f (M) gọi là đặc tính cơ.
II. -
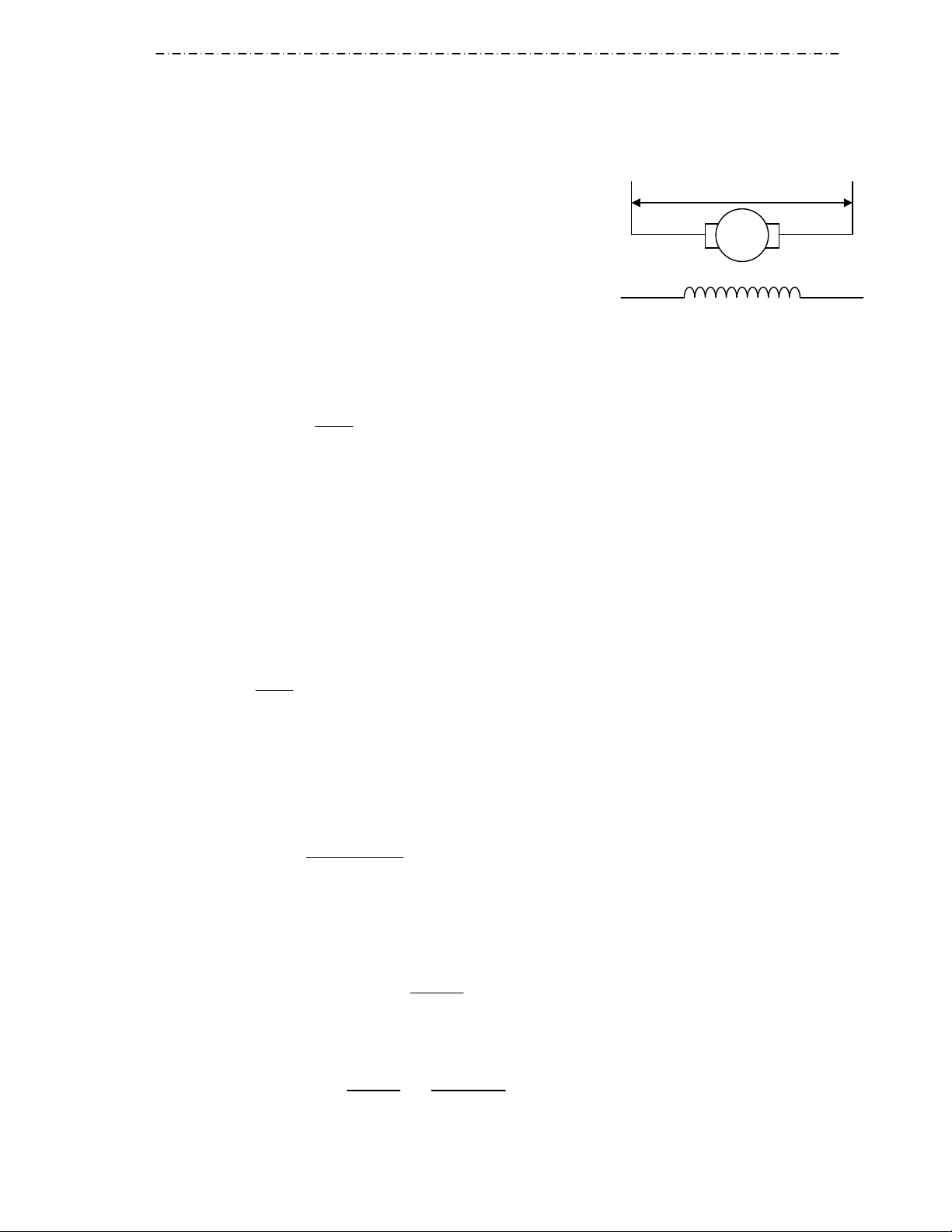
PHƯƠNG TRÌNH ĐẶC TÍNH ĐỘNG CƠ CỦA ĐỘNG CƠ MỘT CHIỀU KÍCH TỪ ĐỘC LẬP:
Từ sơ đồ này ta có phương trình cân bằng
điện áp của mạch phần ứng:
U
ư = Eư + RưIư (1-1)
U
ư : Điện áp phần ứng (V)
E
ư : Sức điện động phần ứng (V) Hình 1
R
ư : Điện trở của mạch phần ứng (Ω)
Sức điện động Eư được xác định bởi biểu thức :
ωω
π
Φ=Φ= K
a
pN
Eu2 (1-2)
Trong đó:
P: Số đôi cực
N: Số thanh dẫn tác dụng của cuộn dây phần ứng
a : Số đôi mạch nhánh song song của cuộn dây phần ứng
Φ : Từ thông kích từ dưới 1 cực từ (Wb)
ω : Tốc độ góc (rad/s)
a
pN
K
π
2
= hệ số cấu tạo động cơ
Từ (1-1) và (1-2) ta có
Φ
−
=K
IRU uuu
ω
(1-3)
Mặt khác, mômen điện từ của động cơ được xác định theo công thức:
M
đt = KΦ Iư (1-4)
Từ đó ta có Mđt
KΦ
Thay vào (1-3 ) ta được:
U
ư RưMđt
KΦ (KΦ)2
Nếu bỏ qua các tổn thất cơ và thép thì mômen cơ trên trục = mômen điện từ
Uư
U
KT
Iư =
ω = - (1-5)
THIẾT KẾ TỐT NGHIỆP
- 5 -
U
ư Rư
KΦ (KΦ)2
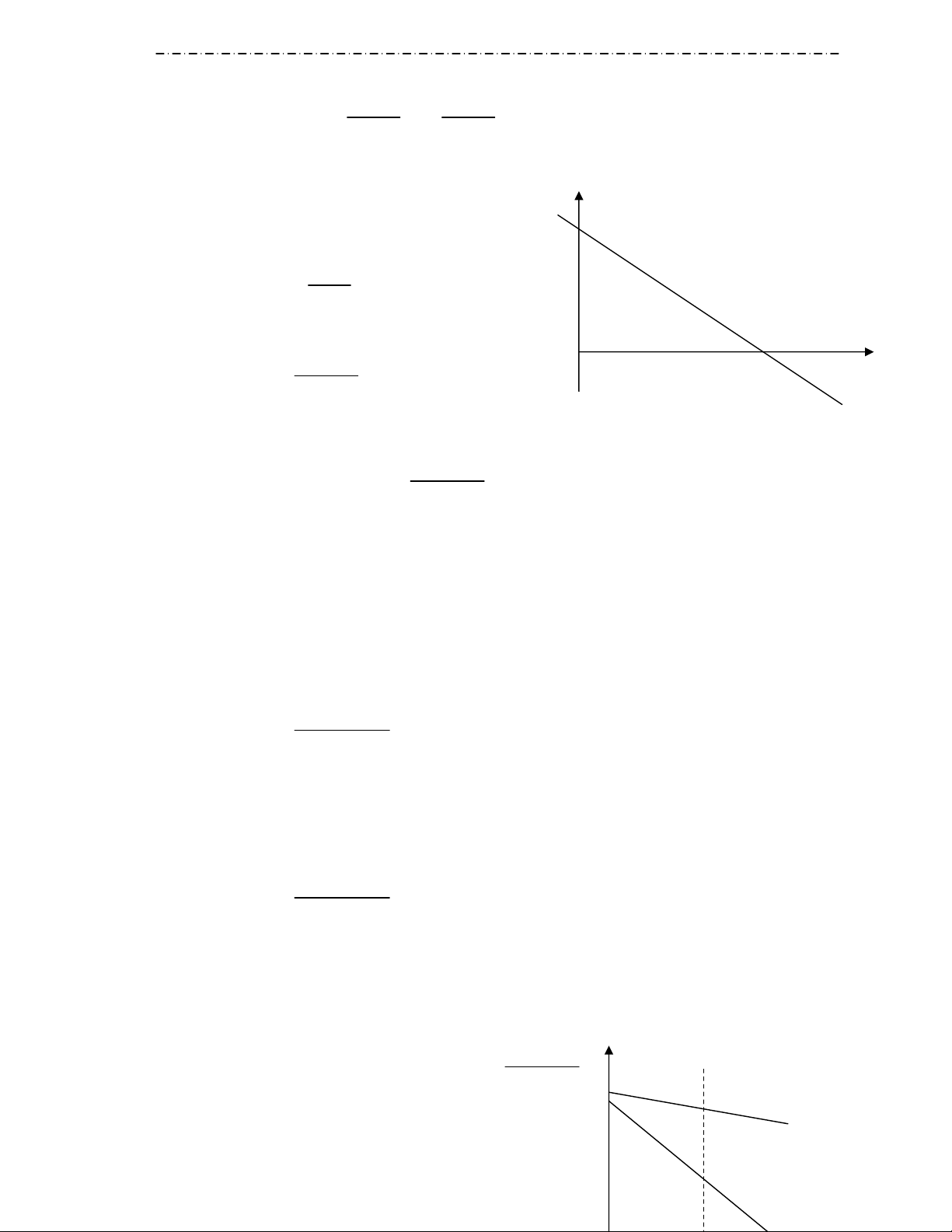
Đây là phương trình đặc tính cơ của động cơ điện 1 chiều kích từ độc lập.
Đồ thị của phương trình (1-6)
- Cắt trục hoành tại
U
ư
R
ư
- Cắt trục tung tại
U
ư
KΦ Hình 2
- Độ dốc của đường đặc tính:
R
ư M
(KΦ)2
ωO : Tốc độ không tải lý tưởng
Δω: Độ sụt tốc
III. CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ:
1/ Khi điều chỉnh tốc độ người ta đưa ra một số các chỉ tiêu sau:
* Sai số tốc độ: Là đại lượng đặc trưng cho độ chính xác duy trì tốc độ đật và
thường được tính theo %:
ωđ - ω
ωđ
Trong đó: ωđ : Tốc độ đặt
ω : Tốc độ làm việc thực
* Độ trơn: Được định nghĩa:
ωi + 1
ωi
Trong đó: ωi + 1: Giá trị tốc độ ổn định đạt được ở cấp kế tiếp (i+1)
ωi : Giá trị tốc độ ổn định đạt được ơ cấp i
* Dải điều chỉnh tốc độ: Là tỉ số giữa giá trị lớn nhất và nhỏ nhất của tốc độ
làm việc ứng với momen tải đã cho: ωmax
ωmin
Dải điều chỉnh căn cứ vào Mđm và Mnm
ω = - M (1-6)
Mnm = KΦ
ωO =
Δω =
ω
ωO
Δω
Mnm M
s% = 100%
ϒ =
D = ω
TN

![Hệ thống Clutch: [Thêm từ khóa phụ/mô tả chi tiết để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151126/phatheodk/135x160/7401448475025.jpg)


![Truyền Động Bánh Răng: [Thêm từ khóa giá trị/mô tả phù hợp với nội dung]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140527/thanhmm47/135x160/1682586_066.jpg)


![Động Cơ Servo: Giới thiệu chi tiết về [Động Cơ Servo]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130410/dangquoctam/135x160/7421365530622.jpg)
![Ôtô Động Cơ Đốt Trong: Khái Quát Chung [CHƯƠNG I]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130309/09124054/135x160/1421362812210.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)