Thuyết minh đồ án tốt nghiệp Bộ Môn : Máy và Tự Động Hoá
Trường ĐH KTCN Thái Nguyên -11/2002- Trang 1
PHẦN THỨ NHẤT
THIẾT KẾ ĐỘNG HỌC MÁY
Phần I:
TỔNG HỢP CẤU TRÚC ĐỘNG HỌC
Nội dung của phần này là xuất phát từ đối tượng gia công, phương pháp gia
công, dụng cụ gia công để xây dựng trên sơ đồ nguyên tắc làm việc- sơ đồ cấu trúc
động học máy.
Máy tiện ren vít vạn năng là loại máy công cụ được sử dụng rộng rãi để gia công
các bề mặt tròn xoay. Máy này phù hợp với các loại hình sản xuất, vì vậy nó chiếm một
vị trí quan trọng trong ngành cơ khí chế tạo. Ngày nay với sự tiến bộ của khoa học kỹ
thuật nó không ngừng được cải tiến để phù hợp với khả năng ngày càng phát triển của
khoa học kỹ thuật. Ngoài việc gia công các bề mặt tròn xoay nó còn gia công được các
bề mặt phức tạp như: mặt định hình, khoan, khoét, doa đạt độ chính xác cao, độ
bóng∇6÷∇7 nếu có cơ cấu đặc biệt thì đạt được∇7÷∇9 Chủ yếu tiện trơn, ren (Quốc tế,
Mođul, Anh, Pít). Cắt được các loại ren một đầu mối, ren trái, phải, ren tiêu chuẩn,
không tiêu chuẩn.
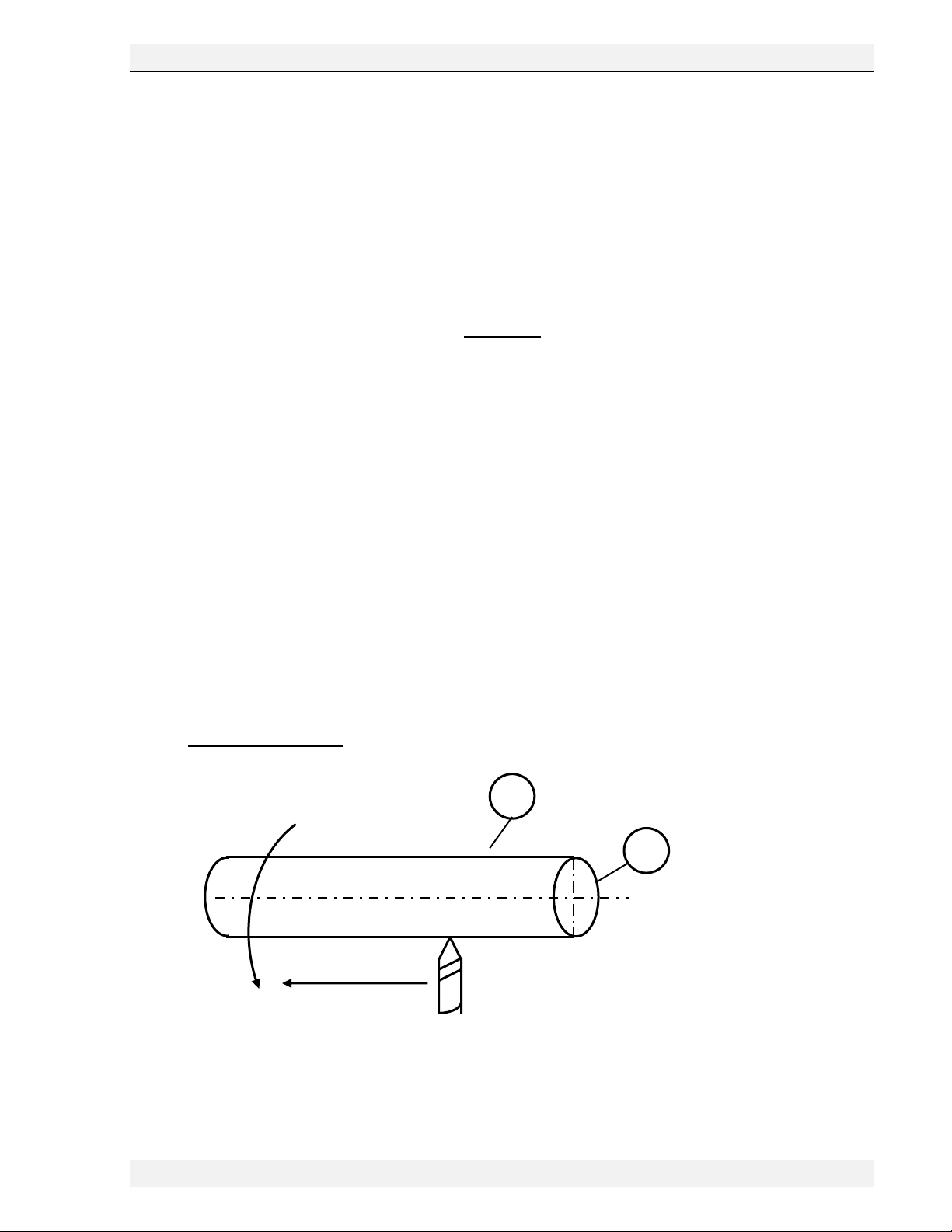
I- Tạo hình bề mặt:
Q1 T2
Máy tiện ren vít vạn năng chủ yếu gia công các mặt trụ tròn xoay, mặt ren...
2
1
Thuyết minh đồ án tốt nghiệp Bộ Môn : Máy và Tự Động Hoá
Trường ĐH KTCN Thái Nguyên -11/2002- Trang 2
Các bề mặt này được tạo thành nhờ 2 chuyển động:
- Chuyển động quay tròn của trục chính mang phôi Q1.
- Chuyển động tịnh tiến của bàn dao T2.
Như vậy chuyển động tạo hìnhφv gồm 2 thành phần φv(Q1;T2)
1- Có một chuyển động tạo hình Φv.
2-Chuyển động tạo hình thành phần
Thực chất của bề mặt gia công là bề mặt xoắn vít, bề mặt này được tạo thành từ
phương pháp vết- vết.
Đường chuẩn (1) được tạo thành từ phương pháp vết do chuyển động tịnh tiến
của dao T2.
Đường sinh (2) được tạo thành do chuyển động quay Q1.
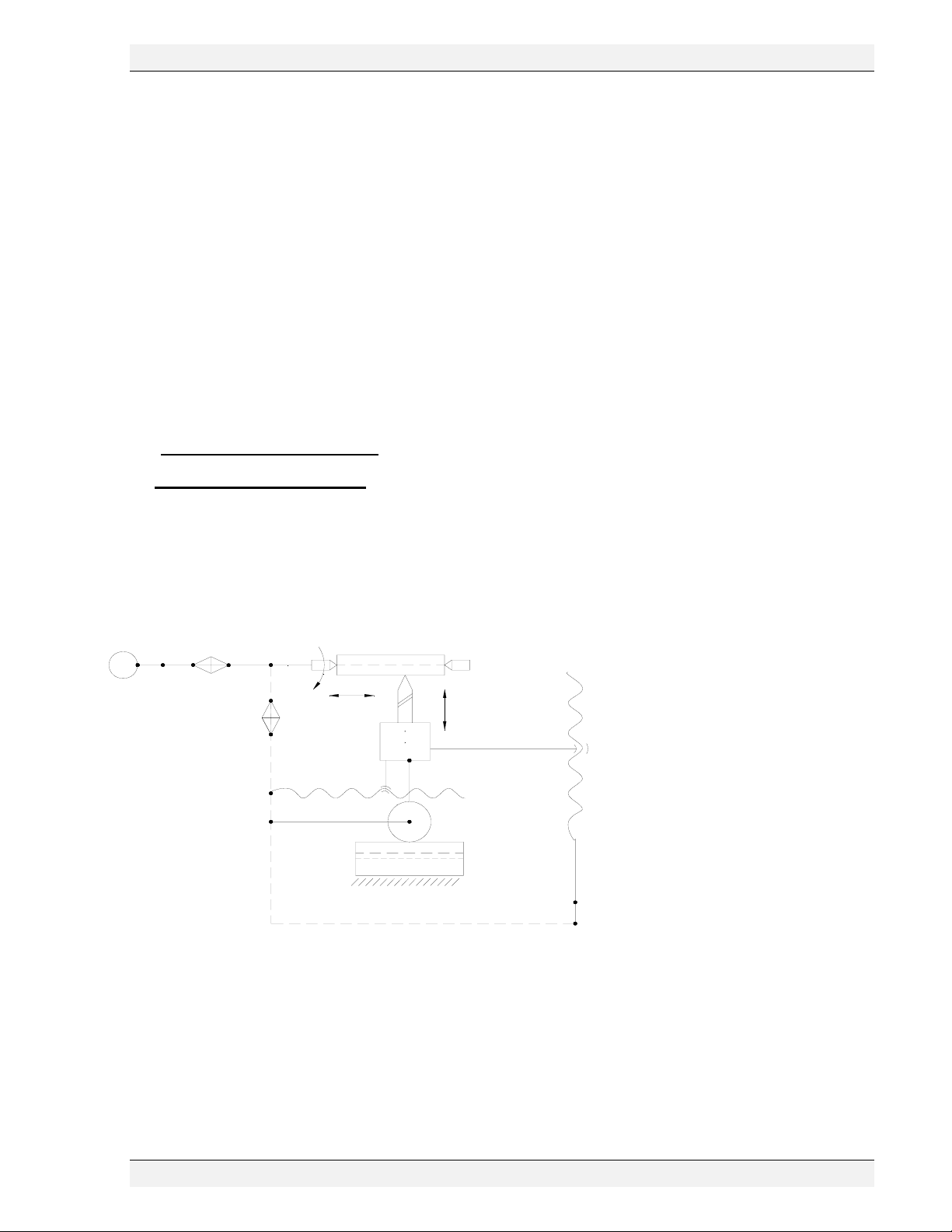
II- Chuyển động trong máy
1- Chuyển động tạo hình :
Là chuyển động cần thiết để tạo ra đường sinh công nghệ và dịch chuyển nó theo
đường chuẩn. Số lượng chuyển động tạo hình là:
N
Φ = NΦs+NΦc - 1/2NΦT.
Với NΦs là số thành phần tạo nên đường sinh, ở đây là chuyển động tịnh tiến của dao.
m
q1
t2 t3
1234
5
6
7
8
9
tvm2
m, z
tvm1
iv
is
Thuyết minh đồ án tốt nghiệp Bộ Môn : Máy và Tự Động Hoá
Trường ĐH KTCN Thái Nguyên -11/2002- Trang 3
NΦc là số chuyển động thành phần tạo nên đường chuẩn với máy đó là chuyển động
quay Q1 của phôi.
NΦT là số chuyển động trùng. NΦT = 0. Vậy NΦ =1+1=2 gồm hai thành phần Φv
(Q1; T2). Phân tích chuyển động tạo hình của máy đó là chuyển động xoắn xích bởi các
liên kết động học.
Ta có phương trình điều chỉnh:
- Xích Tốc độ: nđcơ . i12 . iv .i34.k = nTC
- Xích tạo hình : 1vòng TC . i45 . is .i67.Tmdoc = tp
- Xích chạy dao ngang: 1vòng TC .i45 . is . i67 . i89Tmngang =sn
2- Chuyển động cắt gọt.
Chuyển động cắt gọt là chuyển động cần thiết để thực hiện và tiếp tục quá trình
cắt gọt, ở máy này chuyển động cất trùng với chuyển động tạo hình. Điều này làm cho
kết cấu máy đơn giản xong hạ thấp năng suất máy.
3- Chuyển động phân độ.
Là chuyển động khi cần cắt các bề mặt không liên tục.
4- Chuyển động phụ.
Là những chuyển động không tham gia vào quá trình cắt gọt.
Phần II
ĐẶC TRƯNG KỸ THUẬT
A- Đặc trưng công nghệ.
Trên máy này gia công được các trục tròn xoay (trong, ngoài), mặt côn, mặt
phẳng, các loại ren (hệ mét, hệ Anh, trong, ngoài, phải, trái, 1đầu mối, 2đầu mối, ren
mặt đầu), đồng thời có thể khoan, khoét, tarô...Nếu có thêm các trang bị công nghệ có
thể mở rộng khả năng công nghệ.
- Cấp độ chính xác khi tiện trơn từ 7÷2
- Độ bóng ∇3 ÷ ∇7.
Vật liệu gia công trên máy có thể là gang, thép, hợp kim màu, nhưng phổ biến là
thép chế tạo máy có σp = 75 kg/mm2.
Dao cụ trên máy rất đa dạng như: dao tiện ren, tiện trơn, xén mặt đầu, cắt đứt,
mũi khoan, tarô... Vật liệu dao có thể la thép gió hợp kim cứng...
B- Đặc trưng kích thuớc.
- Đường kính lớn nhất của phôi gia công được trên máy
Thuyết minh đồ án tốt nghiệp Bộ Môn : Máy và Tự Động Hoá
Trường ĐH KTCN Thái Nguyên -11/2002- Trang 4
D
max =2*H = 400 mm
- Chiều cao tâm máy H = Dmax/ 2 = 200 mm
- Khoảng cách giữa 2 mũi tâm L = (3,5 - 7)H = 5H = 5*200 = 1000 mm
-Đường kính phôi lớn nhất gia công hiệu quả trên máy
D
1 max = 1,3. H = 260 mm
- Đường kính phôi luồn qua trục chính
d
1max = (0,15 ÷ 0,2 ) .D1 max = 47 mm
- Đường kính phôi gia công lớn nhất
D
1min = 1/10. D1 max = 26
C- Đặc trưng động học.
1- Xích tốc độ:
Việc tính toán tốc độ cắt lớn nhất và nhỏ nhất của máy bằng cách phối hợp những điều
kiện thuận lợi hay khó khăn với nhau sẽ dẫn tới tăng phạm vị điều chỉnh của máy làm
cho máy có kết cấu phức tạp, do đó việc chọn các trị số tốc độ cắt giới hạn tốt nhất là
dựa vào những số liệu thống kê và sử dụng tốc độ cắt trên máy khác nhau. để xác
địnhtốc độ cắt lớn nhất
Với thép C = 0,7 d1max = 240 mm
chiều sâu cắt nhỏ nhất tmin = (1/2 ÷ 1/2) tmax. Lấy 1/4 tmax ⇔ tmin = 1,1 mm
- Tốc độ cắt giới hạn:
)/(150
1000
1600.26.14,3
1000
max.min. pm
nD
VMax ==
Π
=
)/(10
1000
5,12.47.14,3
1000
min.max.
min pm
nD
V==
Π
=
Z là số cấp tốc độ Z=22
Chọn γ theo tiêu chuẩn γ = 1,26
Từ γ = 1,26 Ta có chuỗi số vòng quay
mmt 5,4240.7,0 3
max ==

Thuyết minh đồ án tốt nghiệp Bộ Môn : Máy và Tự Động Hoá
Trường ĐH KTCN Thái Nguyên -11/2002- Trang 5
nmin = n1 = 12,5 vòng/phút
n2 = 16 vòng/phút
n3 = 20 vòng/phút
n4 = 25 vòng/phút
n5 = 31vòng/phút
n6 = 40 vòng/phút
n7 = 50 vòng/phút
n8 = 63 vòng/phút
n9 = 80 vòng/phút
n10=100 vòng/phút
n11=125 vòng/phút
n12=160 vòng/phút
n13=200 vòng/phút
n14=250 vòng/phút
n15=315 vòng/phút
n16=400 vòng/phút
n17=500 vòng/phút
n18=630 vòng/phút
n19=800 vòng/phút
n20=1000vòng/phút
n21=1250vòng/phút
n22=1600vòng/phút


![Báo cáo thực tập tốt nghiệp Công ty TNHH Cơ điện Samwa Tek: [Mô tả chi tiết hơn về nội dung báo cáo nếu có thể]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/trantiendat_ct2/135x160/96461758161119.jpg)
![Báo cáo thực tập tại Garage Car Plus [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250810/nguyenanhquoc2809@gmail.com/135x160/25661754896300.jpg)



![Đồ án tốt nghiệp: Tính toán, kiểm tra hệ thống điều hòa không khí cho tòa nhà Depot Tham Lương [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250717/vijiraiya/135x160/40421752722146.jpg)