
17-3. ĐI U CH NH T C Đ ĐNG C Ề Ỉ Ố Ộ Ộ Ơ
ĐI N KHÔNG ĐNG BỆ Ồ Ộ
17-3. ĐI U CH NH T C Đ ĐNG C Ề Ỉ Ố Ộ Ộ Ơ
ĐI N KHÔNG ĐNG BỆ Ồ Ộ
Các ph ng pháp đi u ch nh ch y u:ươ ề ỉ ủ ế
1. Trên stato: thay đi đi n áp đa vào dây qu n stato, thay đi ổ ệ ư ấ ổ
s đôi c c c a dây qu n stato hay thay đi t n s ngu n cung c p.ố ự ủ ấ ổ ầ ố ồ ấ
2. Trên rôto: thay đi đi n tr ho c n i ti p trên m ch rôto ổ ệ ở ặ ố ế ạ
m t hay nhi u máy đi n (g i là n i c p).ộ ề ệ ọ ố ấ
17.3.1. Đi u ch nh t c đ b ng cách thay đi s đôi c cề ỉ ố ộ ằ ổ ố ự
Đng c đi n KĐB khi làm vi c bình th ng có h s tr t s ộ ơ ệ ệ ườ ệ ố ượ
nh nên n ỏ n≈1 = 60f1/p.
Khi t n s fầ ố 1 = const, thay đi p s thay đi đc t c đ n (t c ổ ẽ ổ ượ ố ộ ố
đ t l ngh ch v i s đôi c c p).ộ ỷ ệ ị ớ ố ự
Dây qu n stato có th n i thành bao nhiêu s đôi c c khác nhau ấ ể ố ố ự
thì t c đ có b y nhiêu c p. ố ộ ấ ấ
Nh v y t c đ ch có th thay đi t ng c p, không b ng ư ậ ố ộ ỉ ể ổ ừ ấ ằ
ph ng.ẳ

Có nhi u cách thay đi s đôi c c c a dây qu n stato: ề ổ ố ự ủ ấ
1. Đi cách n i đ có s đôi c c khác nhau. Cách này dùng trong ổ ố ể ố ự
đng c đi n 2 c p t c đ.ộ ơ ệ ấ ố ộ
2. Trong rãnh stato đt hai dây qu n đc l p có s đôi c c khác ặ ấ ộ ậ ố ự
nhau, th ng đ đt hai c p t c đ theo t l 4 : 3 hay 6 : 5.ườ ể ạ ấ ố ộ ỷ ệ
3. Trên rãnh stato có hai dây qu n đc l p có s đôi c c khác ấ ộ ậ ố ự
nhau, m i dây qu n l i có th đi n i đ có s đôi c c khác nhau ỗ ấ ạ ể ổ ố ể ố ự
(dùng trong đng c có 3 , 4 c p t c đ).ộ ơ ấ ố ộ
V i đng c rôto dây qu n, dây qu n rôto có s đôi c c b ng s ớ ộ ơ ấ ấ ố ự ằ ố
đôi c c c a dây qu n stato, vì v y khi đu l i dây qu n stato đ có ự ủ ấ ậ ấ ạ ấ ể
s đôi c c khác thì dây qu n rôto cũng ph i đu l i. Đi u này ố ự ấ ả ấ ạ ề
không ti n l i, do đó đng c đi n lo i này không dùng ph ng ệ ợ ộ ơ ệ ạ ươ
pháp thay đi s đôi c c đ đi u ch nh t c đ. ổ ố ự ể ề ỉ ố ộ
V i đng c rôto l ng sóc, rôto có th thích ng v i m i s đôi ớ ộ ơ ồ ể ứ ớ ọ ố
c c c a stato, do đó thích h p v i đi u ch nh t c đ b ng cách thay ự ủ ợ ớ ề ỉ ố ộ ằ
đi s đôi c c.ổ ố ự
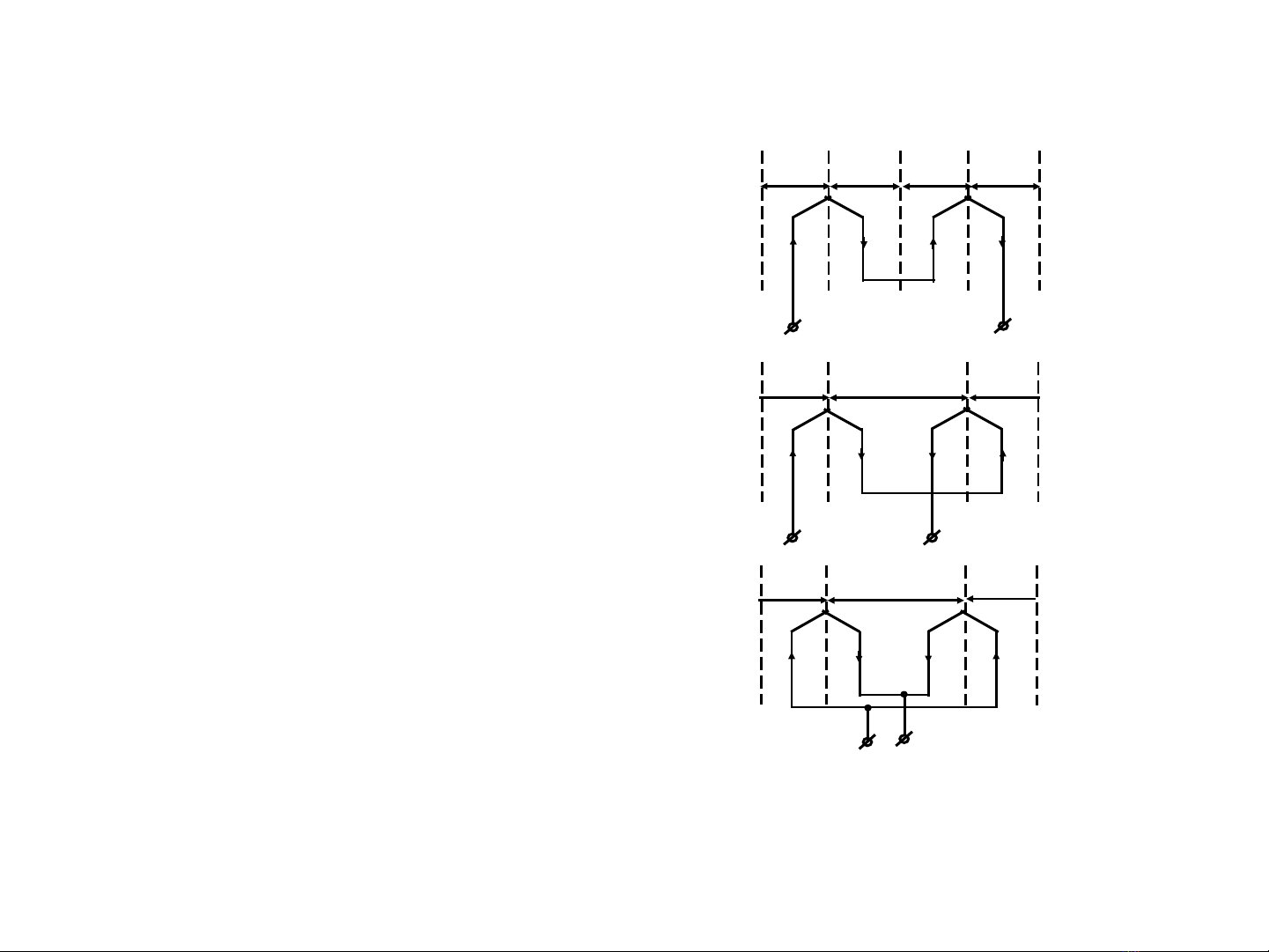
S đ thay đi s đôi c c nh sau (hình 17-6):ơ ồ ổ ố ự ư
c)
/2 /2
A1 X1 A 2 X2
Hình 17-6.
S đ nguyên lý thay đi s đôi c cơ ồ ổ ố ự
A1
a)
X1
X2
A2
/2 /2
A1 X1 A 2 X2
b)
Thay đi t n i thu n (hình 17-6a) ổ ừ ố ậ
sang n i ng c (hình 17-6b) ta ố ượ
đc s đôi c c khác nhau theo t ượ ố ự ỷ
l 2 : 1.ệ
Cũng có th đi t đu n i ti p ể ổ ừ ấ ố ế
(hình 17-6a) sang đu song (hình 17-ấ
b) hai cu n dây tu theo yêu c u ộ ỳ ầ
c a đi n áp và dòng đi n đ có s ủ ệ ệ ể ố
đôi c c khác nhau.ự
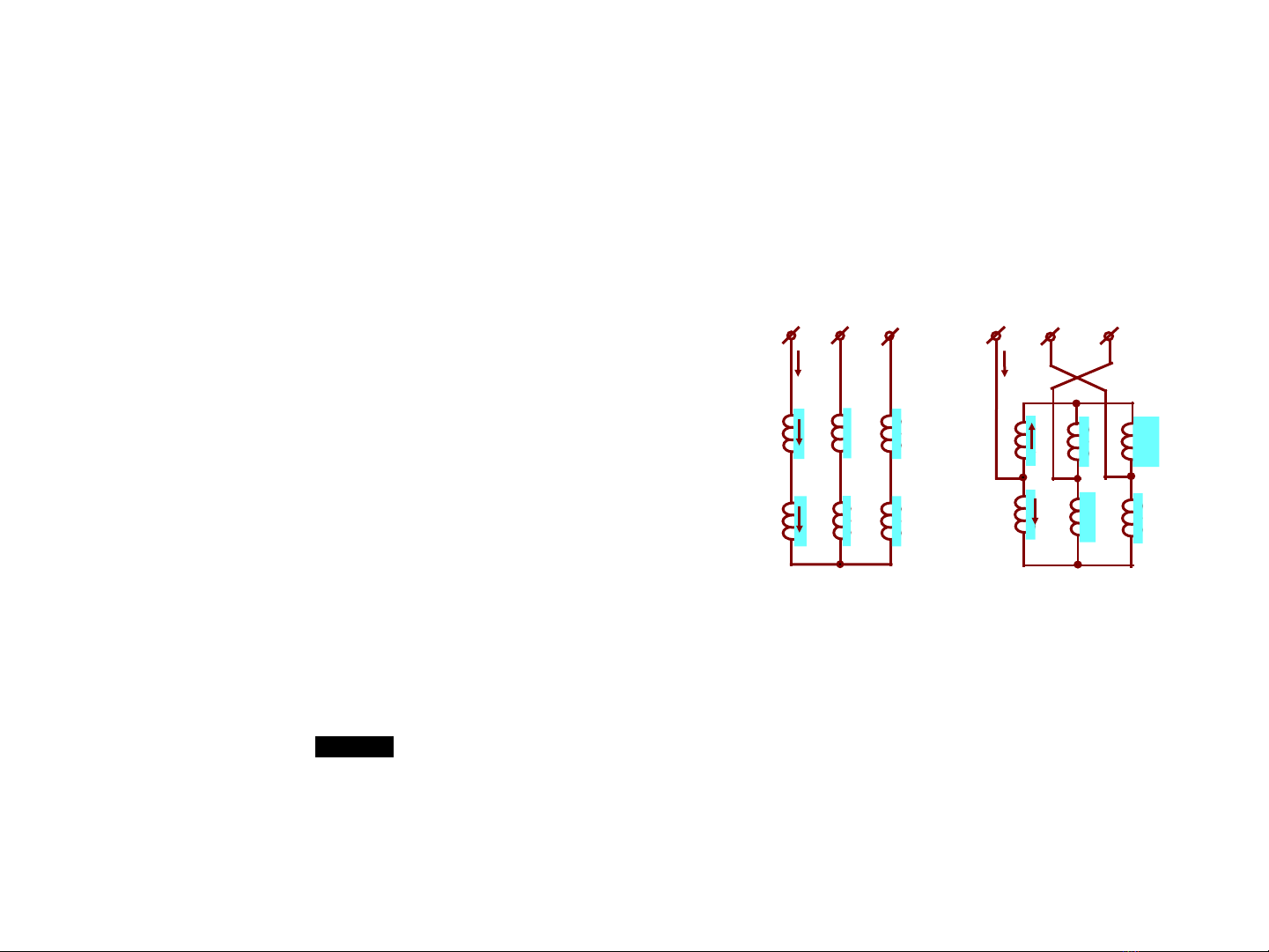
V i đng c 3 pha, tu theo cách đu Y hay ớ ộ ơ ỳ ấ Δ và cách đuấ dây qu nấ
pha song song hay n iố ti pế mà ta có loại đngộ cơ hai c pấ t cố độ có
mômen không điổ ho cặ công su tấ không điổ.
Hình 17-7. Sơ đ ồđu dây qu n khi ấ ấ đi ổ
t c ốđ theo t l 2:1 v i mômen không ộ ỷ ệ ớ điổ
Y (p2=2p1 ) YY (p1)
I’
f
ABC
I’
f
IdId
C
B
A
I’
f
I’
f
Hình 17-7, chuy n t đu hình Y sang ể ừ ấ
YY, ta có:
PY = 3.Ul.I’
f.ηY.cosφY
PYY = 3.Ul.2I’
f.ηYY.cosφYY
Giả thi tế khi thay điổ t cố độ η và cosφ
không điổ, khi đó
2
Y
YY
P
P
![Bài giảng chỉnh lưu điều khiển 3 pha [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2018/20180804/quaanghuy123/135x160/4891533400999.jpg)
![Bài giảng chỉnh lưu điều khiển 1 pha [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2018/20180804/quaanghuy123/135x160/681533401001.jpg)






















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)