Bài giảng
Hệ thống bánh răng
Đại học Bách Khoa Hà Nội
Viện Cơ khí
Bộ môn Cơ sở thiết kế máy và Robot
Giảngviên: TS. NguyễnBáHưng
Nội dung bài giảng
Đại cương
Phân tích động học hệ thống bánh răng
Hệ bánh răng thường
Hệ bánh răng vi sai
Hệ bánh răng hành tinh
Chọn số răng các bánh răng trong hệ hành tinh
Công dụng của hệ thống bánh răng
Định nghĩa
Hệ thống bánh răng là hệ thống bao gồm nhiều bánh răng lần lượt ăn khớp với nhau
để thực hiện các yêu cầu truyền động.
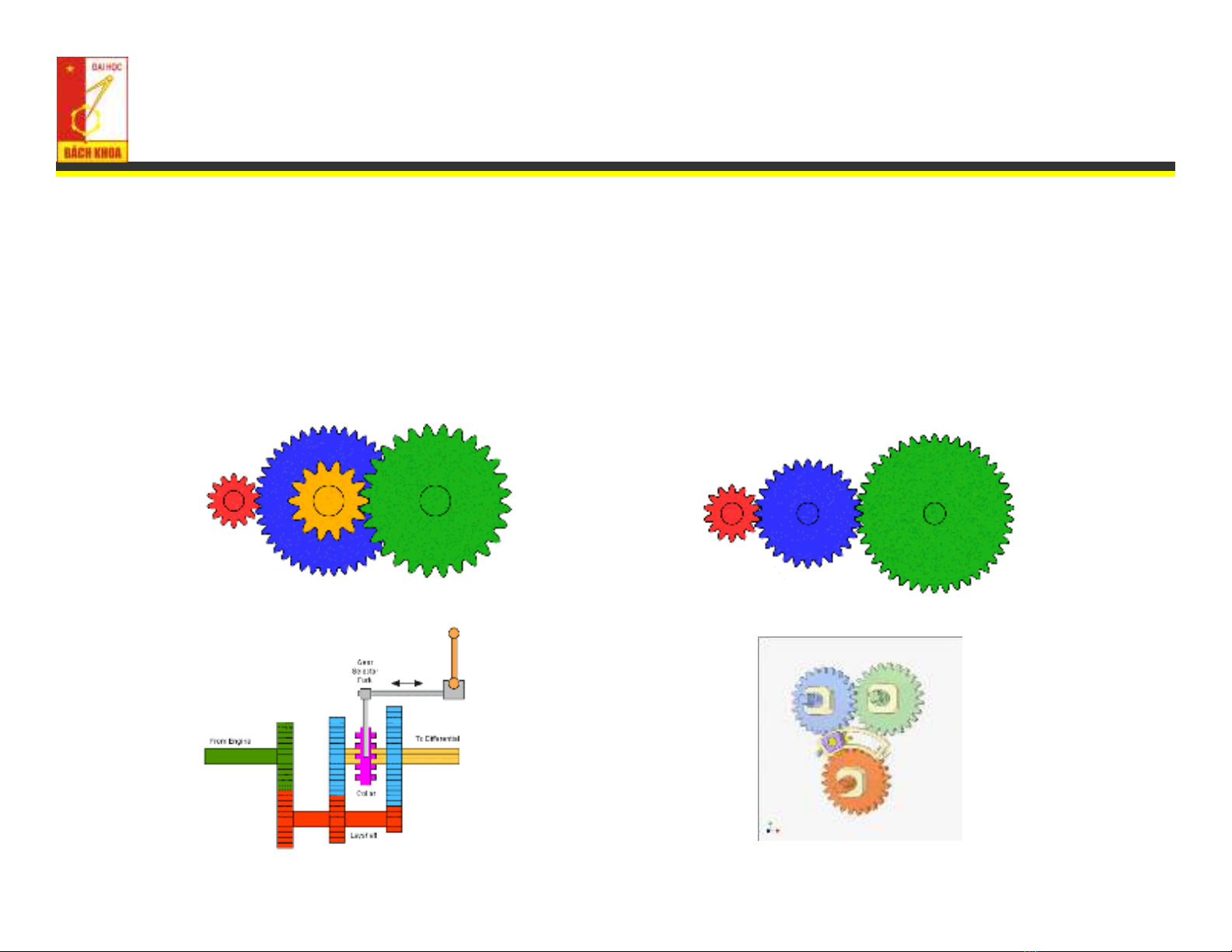
Công dụng
Đại cương
Thực hiện tỉ số truyền lớn Truyền chuyển động giữa hai trục xa nhau
Thay đổi tỉ số truyền Thay đổi chiều quay
Tổng hợp hay phân tách chuyển động
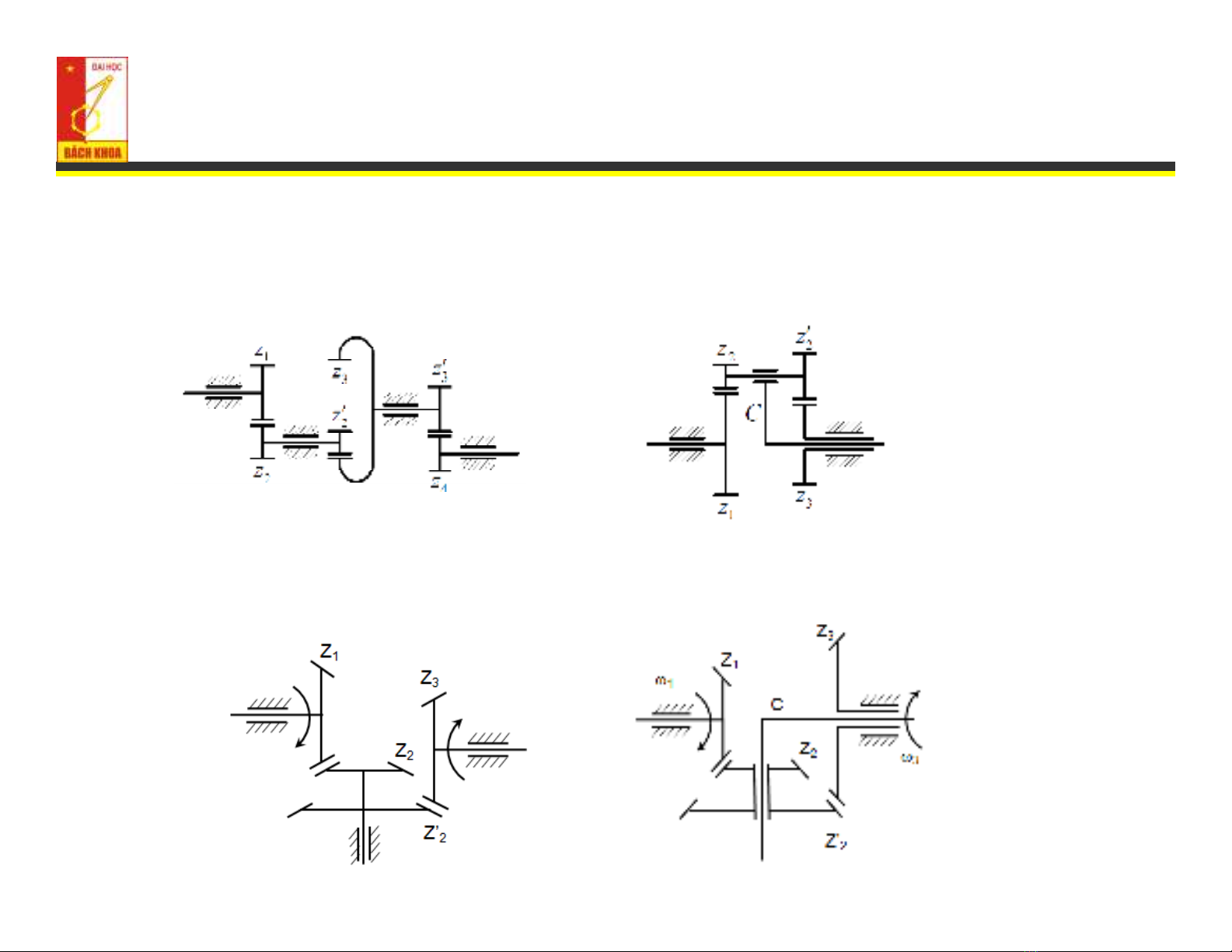
Phân loại
Đại cương
Hệ bánh răng phẳng
Hệ bánh răng không gian
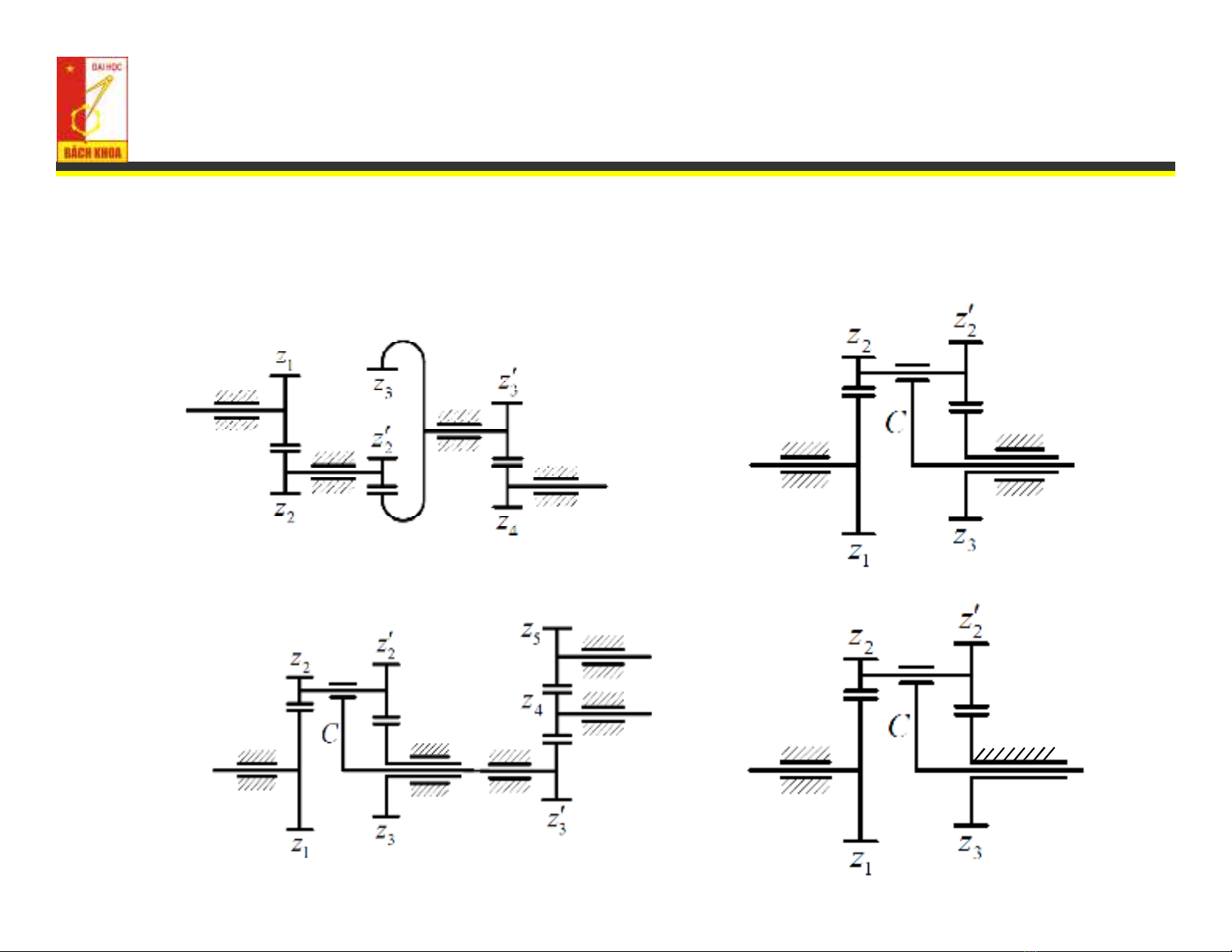
Phân loại
Đại cương
Hệ bánh răng thường Hệ bánh răng vi sai
Hệ bánh răng hỗn hợp Hệ bánh răng hành tinh
![Đề cương bài giảng Nguyên lý động cơ [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/kimphuong1001/135x160/75891752564030.jpg)




![Bài giảng Nguyên lý máy: Chương 5 - Đại học Xây dựng Hà Nội [FULL]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250423/echdada123/135x160/2892319_5577.jpg)




![Bài giảng Ứng dụng tin học trong Kỹ thuật phương tiện thủy [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251216/anhquangvu03@gmail.com/135x160/12021765937860.jpg)



![Bài tập tối ưu trong gia công cắt gọt [kèm lời giải chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251129/dinhd8055/135x160/26351764558606.jpg)





