Bộ môn Cơ Điện Tử
Trường Đại học Bách khoa TP.HCM
Đáp án học kỳ II, 2010 – 2011 (13 / 06 / 2011)
Trang bị điện và điện tử (202089 – 1 tín chỉ)
Câu 1 (2 điểm)
Trình bày cấu tạo và nguyên lý làm việc của động cơ xoay chiều 3 pha:
Về cấu tạo (1đ):
Động cơ điện xoay chiều 3 pha gồm có 2 phần chính:
• Phần cảm: gồm 3 cuộn dây đặt lệch nhau 1200 trong không gian và được cấp điện xoay
chiều 3 pha để tạo ra từ trường quay. Phần cảm thường đặt ở stator. Các cuộn dây pha phần
cảm có thể nối theo hình sao hay tam giác tùy theo điện áp của mỗi cuộn dây pha và tùy
theo điện áp lưới điện. (0.5)
• Phần ứng: Cũng gồm 3 cuộn dây và thường đặt ở roto. Tùy theo kết cấu của ba cuộn day
phần ứng mà động cơ điện xoay chiều ba pha chia ra hai loại: (0.5)
o Khi 3 cuộn dây phần ứng kết hợp thành một lồng trụ như hình sau với các thanh dẫn
bằng nhôm thì roto được gọi là ro to lồng sóc.
o Khi 3 cuộn dây phần ứng bằng dây đồng được nối hình sao và 3 đầu dây được đưa ra
qua hệ vòng trượt-chổi than để nối với điện trở mạch ngoài thì roto được gọi là roto dây
quấn.
Về nguyên lý làm việc (1đ)
• Khi từ trường quay (giả sử theo chiều KĐH) của phần cảm quét qua các dây dẫn phần ứng
thì trong các cuộn dây (hay thanh dẫn) phần ứng xuất hiện suất điện động cảm ứng. Nếu
mạch phần ứng nối kín thì có dòng điện cảm ứng sinh ra (chiều xác định theo quy tắt bàn tay
phải). Từ trường quay lại tác dụng vào chính dòng cảm ứng này một lực từ có chiều xác
định theo quy tắt bàn tay trái và tạo ra mô men làm quay phần cảm theo chiều quay của từ
trường quay. (0.5)
• Tốc độ quay của phần cảm luôn nhỏ hơn tốc độ quay của từ trường quay (không đồng bộ).
Nếu phần cảm quay với vận tốc bằng với vận tốc của từ trường quay thì từ trường sẽ không
quét qua các dây dẫn phần cảm nữa nên hiện suất điện động cảm ứng và dòng điện cảm ứng
không còn. Do mô men cản, phần ứng sẽ quay chậm lại hơn so với từ trường và các dây dẫn
phần cảm lại bị từ trường quét qua, dòng điện cảm ứng lại xuất hiện và do đó lại có mô men
quay làm phần cảm tiếp tục quay theo từ trường quay nhưng với tốc độ luôn nhỏ hơn từ
trường. Động cơ điện hoạt động theo nguyên tắt này được gọi là động cơ điện không đồng
bộ (KĐB) hay động cơ điện dị bộ hoặc động cơ điện xoay chiều cảm ứng. (0.5)
Câu 2 (3 điểm)
Trình bày cách khởi động động cơ không đồng bộ 3 pha với 3 phương pháp
• Dùng điện trở mở máy ở mạch rotor
• Mở máy với điện trở hoặc điện kháng nối tiếp trong mạch stator
• Dùng máy biến áp tự ngẫu
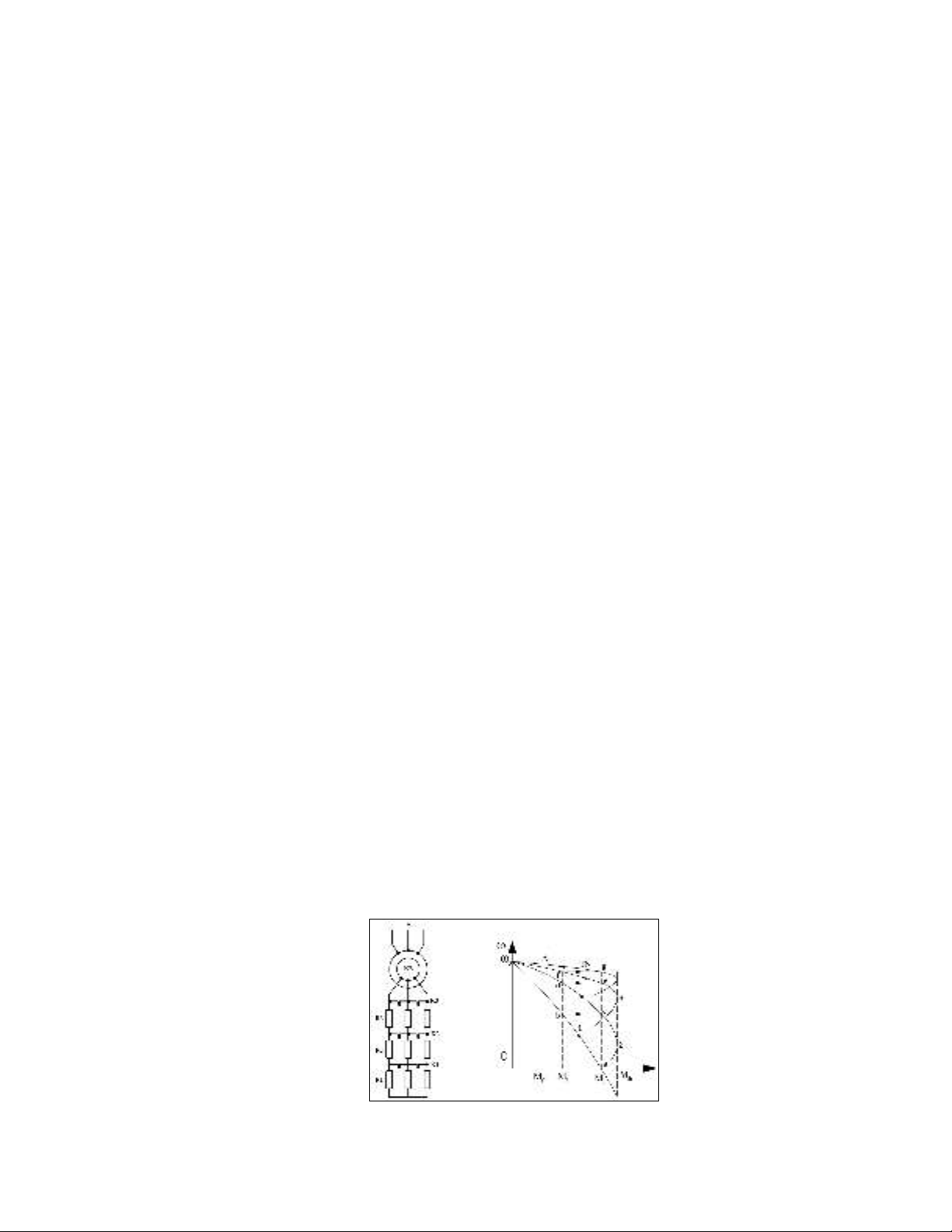
Dùng điện trở mở máy ở mạch rotor (1đ)
Bộ môn Cơ Điện Tử
Lúc bắt đầu mở máy, các tiếp điểm công tắc tơ K1, K2, K3 đều mở, cuộn dây rotor được nối
với cả 3 cấp điện trở phụ (R1+R2+R3) nên đường đặc tính cơ là đường 1. Tới điểm b, tốc độ
động cơ đạt wb và mômen giảm còn M2, các tiếp điểm K1 đóng lại, cắt các điện trở phụ R1 ra
khỏi mạch rotor. Động cơ được tiếp tục mở máy với điện trở phụ (R2+R3) trong mạch rotor
và chuyển sang làm việc tại điểm c trên đặc tính 2 ít dốc hơn. Mômen tăng từ M2 lên M1 và
tốc độ động cơ lại tiếp tục tăng. Động cơ làm việc trên đường đặc tính 2 từ c đến d. Lúc này,
các tiếp điểm K2 đóng lại, nối tắt các điện trở R2. Động cơ chuyển sang mở máy với điện trở
R3 trong mạch rotor trên đặc tính 3 tại điểm e và tiếp tục tăng tốc tới điểm f. Lúc này các tiếp
điểm K3 đóng lại, điện trở R3 trong mạch rotor bị loại. Động cơ chuyển sang làm việc trên
đặc tính tự nhiên tại g và tăng tốc đến điểm làm việc A ứng với mômen cản MC. Quá trình
mở máy kết thúc.
Để đảm bảo quá trình mở máy như đã xét sao cho các điểm chuyển đặc tính ứng với cùng một
mômen M2, M1 thì các điện trở phụ tham gia vào mạch rotor lúc mở máy phải được tính chọn
cNn thận theo phương pháp riêng. Ngoài sơ đồ mở máy với điện trở đối xứng ở mạch rotor,
trong thực tế còn dùng sơ đồ mở máy với điện trở không đối xứng ở mạch rotor, nghĩa là điện
trở mở máy được cắt giảm không đều trong các pha rotor khi mở máy
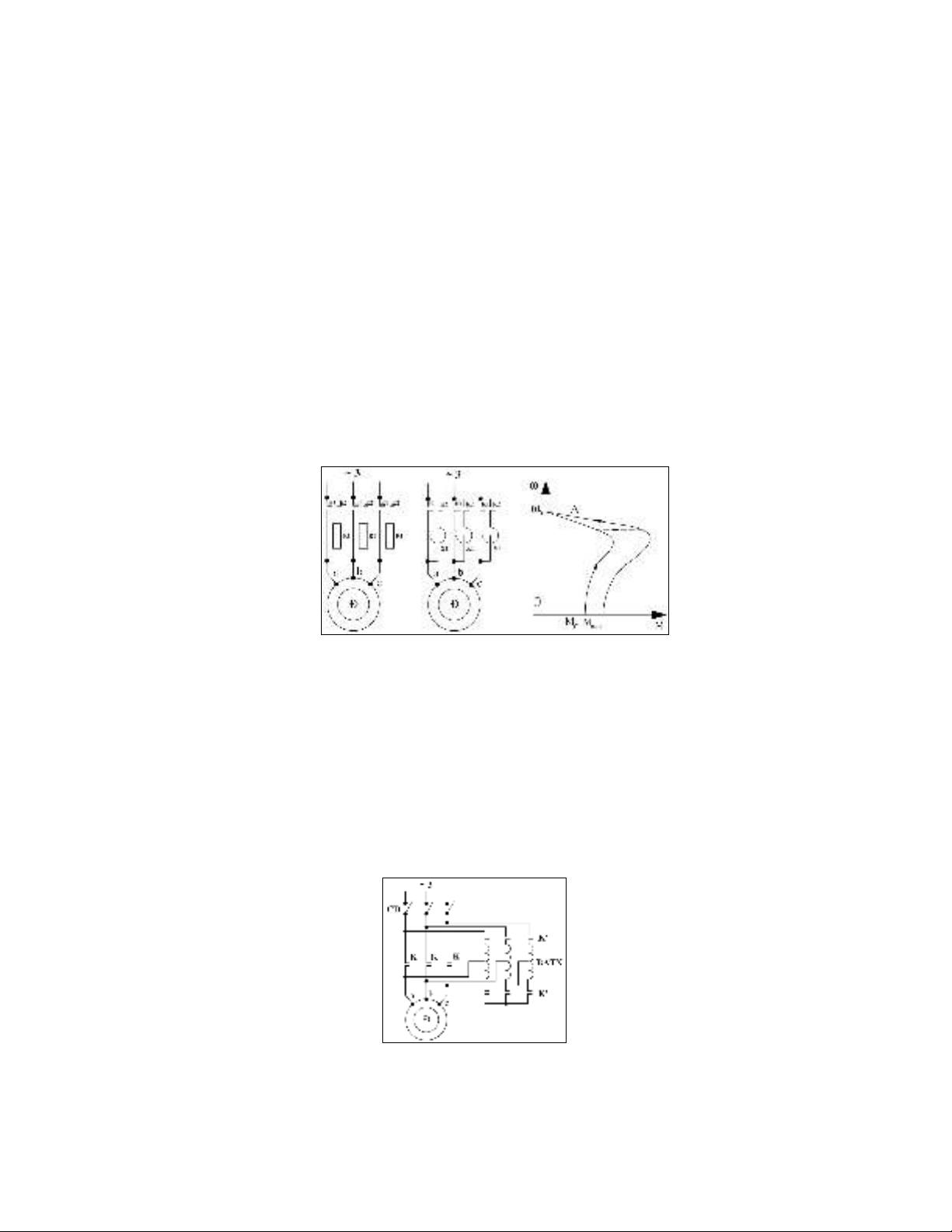
Mở máy với điện trở hoặc điện kháng nối tiếp trong mạch stator (1đ)
Phương pháp này dùng điện trở hoặc điện kháng mắc nối tiếp với mạch stator lúc mở máy và
có thể áp dụng cho cả động cơ rotor lồng sóc lẫn rotor dây quấn. Do có điện trở hoặc điện
kháng nối tiếp nên dòng mở máy của động cơ giảm đi, nằm trong giá trị cho phép. Mômen
mở máy của động cơ cũng giảm. Thời điểm ban đầu của quá trình mở máy, các tiếp điểm K2
đóng lại (các tiếp điểm K1 mở) để điện trở (hình a) hoặc điện kháng (hình b) tham gia vào
mạch stator nhằm hạn chế dòng điện mở máy. Khi tốc độ động cơ đã tăng đến một mức nào
đó (tuỳ hệ truyền động) thì các tiếp điểm K1 đóng lại, K2 mở ra để loại điện trở hoặc điện
kháng ra khỏi mạch stator. Động cơ tăng tốc đến tốc độ làm việc. Quá trình mở máy kết thúc.
Sơ đồ hình trên là mở máy với 1 cấp điện trở hoặc điện kháng ở mạch stator. Có thể mở
máy với nhiều cấp điện trở hoặc điện kháng khi công suất động cơ lớn
Dùng máy biến áp tự ngẫu(1đ)
Phương pháp này được sử dụng để đặt một điện áp thấp cho động cơ khi mở máy. Do vậy,
dòng điện của động cơ khi mở máy giảm đi. Các tiếp điểm K' đóng, K mở lúc mở máy. Khi
K' mở, K đóng thì quá trình mở máy kết thúc. Phương pháp mở máy dùng cuộn kháng X và
máy biến áp tự ngẫu thích hợp cho việc mở máy các động cơ cao áp
Bộ môn Cơ Điện Tử
Câu 3 (2 điểm)
Trình bày cách hãm và đảo chiều động cơ không đồng bộ 3 pha
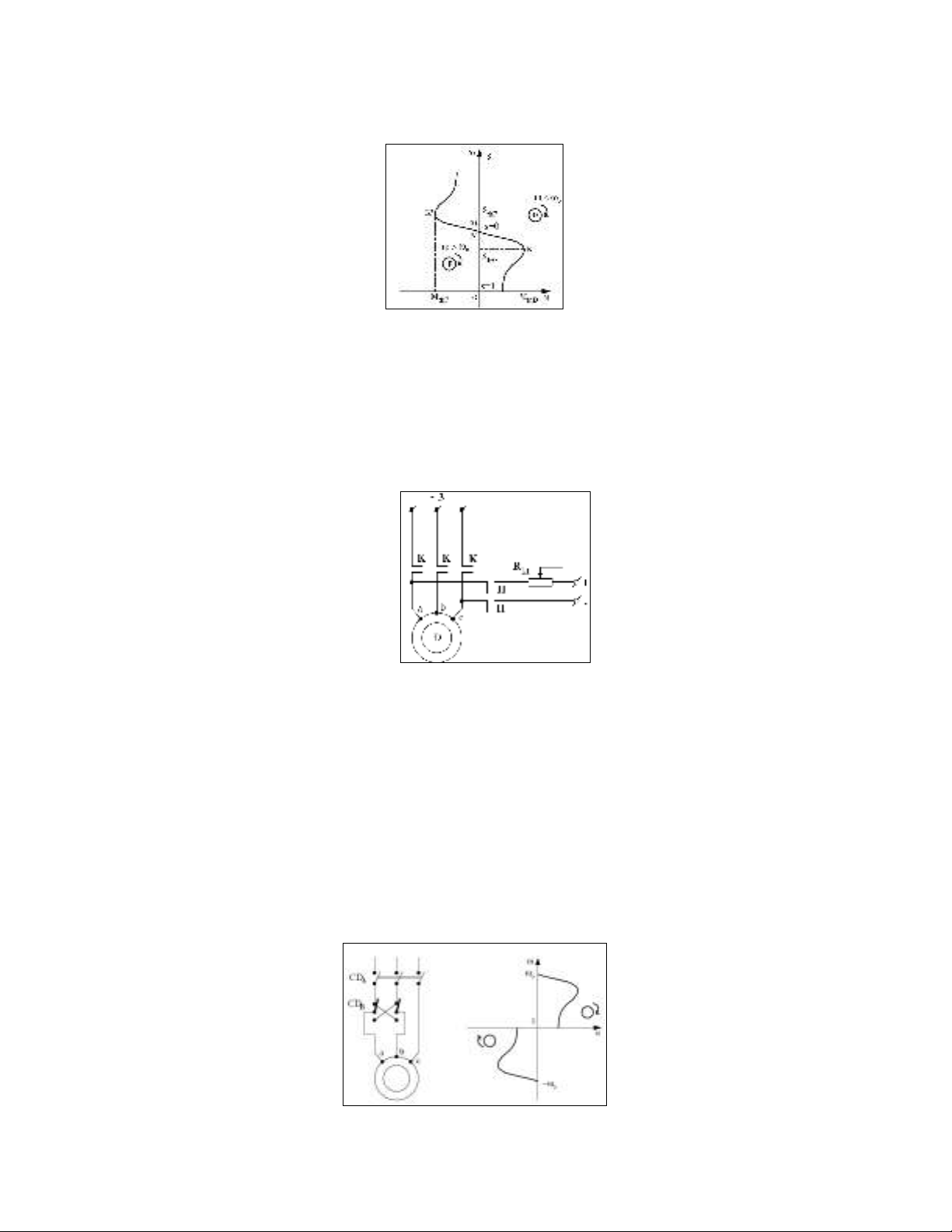
Hãm động cơ(1đ)
Hãm tái sinh
Đặc tính hãm tái sinh của động cơ KĐB như hình vẽ. Động cơ điện xoay chiều KĐB ở chế độ
hãm tái sinh khi tốc độ động cơ vượt quá tốc độ đồng bộ w0. Khi hãm tái sinh thì động cơ làm
việc ở chế độ máy phát
Hãm ngược
a) Hãm ngược nhờ đưa điện trở phụ vào mạch phần ứng
b) Hãm ngược nhờ đảo chiều quay
Hãm động năng
Để hãm động năng một động cơ điện KĐB đang làm việc ở chế độ động cơ, ta phải cắt stator
ra khỏi lưới điện xoay chiều (mở các tiếp điểm K ở mạch lực) rồi cấp vào stator dòng điện
một chiều để kích từ (đóng các tiếp điểm H). Thay đổi dòng điện kích từ nhờ biến trở Rkt
Do động năng tích lũy, rôto tiếp tục quay theo chiều cũ trong từ trường một chiều vừa được
tạo ra. Trong cuộn dây phần ứng xuất hiện một dòng điện cảm ứng. Lực từ trường tác dụng
vào dòng cảm ứng trong cuộn dây phần ứng sẽ tạo ra mômen hãm và rôto quay chậm dần.
Động cơ điện xoay chiều khi hãm động năng sẽ làm việc như một máy phát điện có tốc độ (do
đó tần số) giảm dần. Động năng qua động cơ sẽ biến đổi thành điện năng tiêu thụ trên điện trở
ở mạch rôto
Đảo chiều (1đ)
Để đảo chiều quay của động cơ KĐB, cần đảo chiều quay của từ trường quay do stator tạo ra.
Muốn vậy, chỉ cần đảo chiều hai pha bất kỳ trong 3 pha nguồn cấp cho stator. Sơ đồ đảo chiều
quay động cơ KĐB và đặc tính cơ khi đảo chiều quay
Bộ môn Cơ Điện Tử
Câu 4 (3 điểm)
Trình bày cách điều khiển tốc độ động cơ không đồng bộ 3 pha với 3 phương pháp
• Thay đổi điện trở phụ trong mạch stato
• Thay đổi điện áp đặt vào mạch stato
• Thay đổi tần số của nguồn xoay chiều
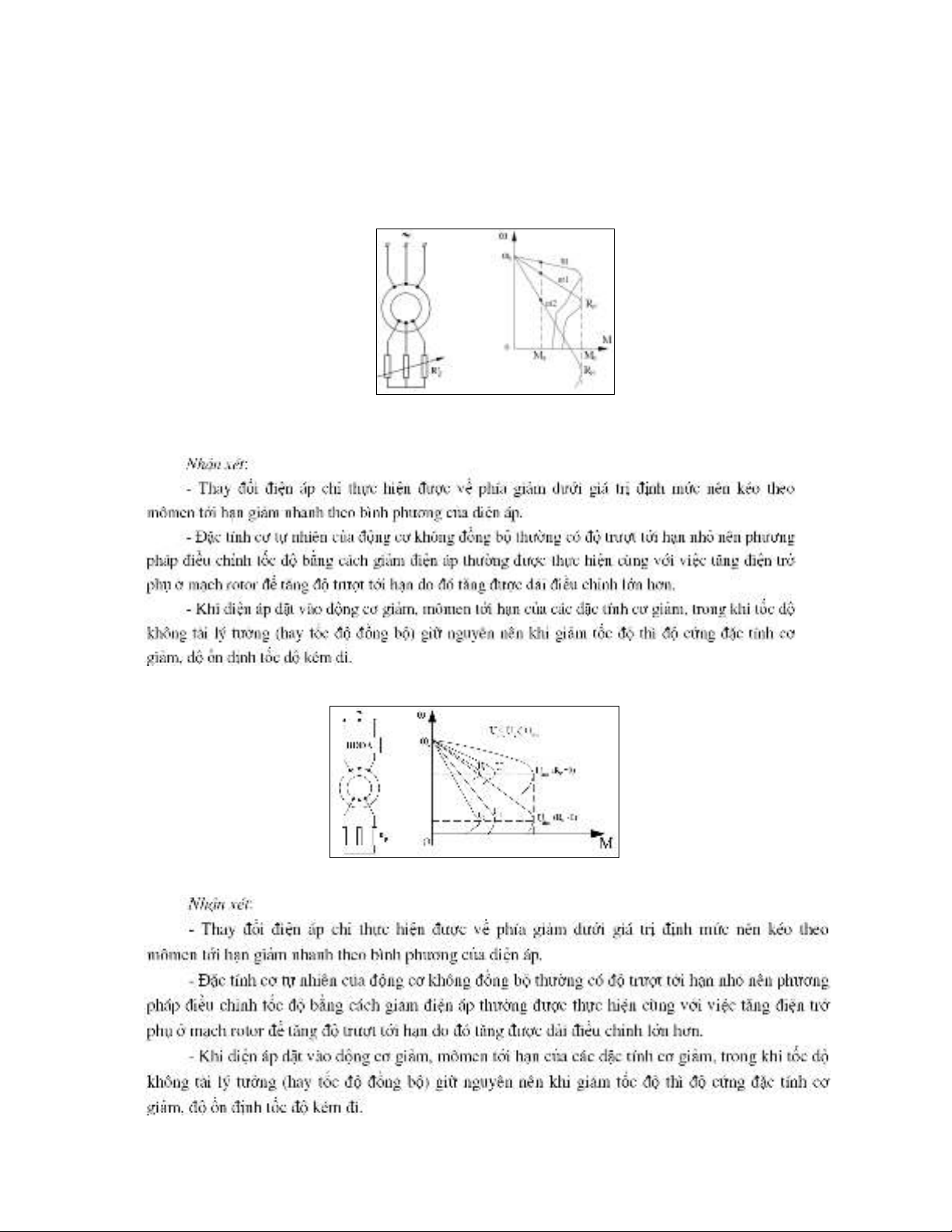
Thay đổi điện trở phụ trong mạch stato (1đ)
Phương pháp này chỉ được sử dụng với động cơ roto dây quấn và được ứng dụng rộng rãi do
tính đơn giản của phương pháp. Sơ đồ nguyên lý và các đặc tính cơ khi thy đổi điện trở phần
ứng.
Thay đổi điện áp đặt vào mạch stato(1đ)
Thực hiện phương pháp này với điều kiệngiữ không đổi tần số. Điện áp cấp cho động cơ lấy từ một bộ
biến đổi điện áp xoay chiều.
Bộ môn Cơ Điện Tử
Thay đổi tần số của nguồn xoay chiều (1đ)


![Đề thi học kì 2 môn Trang bị điện-điện tử trong máy công nghiệp năm 2023-2024 có đáp án [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250401/lakim0906/135x160/8231743476657.jpg)























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)