Baùo caùo ñoà aùn moân hoïc I
L i c m nờ ả ơ
Kính g i Th y TS. Nguy n Thi n Thành!ử ầ ễ ệ
Em là Nguy n Uy Danh, sinh viên năm 4, khoa Đi n_Đi n T , Đ i H c Bách Khoaễ ệ ệ ử ạ ọ
Tp.HCM.
H c kỳ này, em r t vinh d đ c th c hi n đ tài c a đ án môn h c I d i s h ngọ ấ ự ượ ự ệ ề ủ ồ ọ ướ ự ướ
d n t n tình c a Th y. Chính s nhi t tình ch d n c a Th ý đã giúp em hoàn thành đẫ ậ ủ ầ ự ệ ỉ ẫ ủ ầ ồ
án khá t t, đ t đ c nh ng yêu c u c b n mà đ tài đ t ra. Và cũng qua đó, em đã h cố ạ ượ ữ ầ ơ ả ề ặ ọ
h i, ti p c n đ c nhi u v n đ th c t h n, b sung nh ng “khe h ” ki n th c doỏ ế ậ ượ ề ấ ề ự ế ơ ổ ữ ở ế ứ
vi c h c thiên v lý thuy t đ l i.ệ ọ ề ế ể ạ
Em xin chân thành c m n Th y.ả ơ ầ
Cũng qua đây, em xin g i l i c m n chân thành c a mình đ n gia đình, b n bè –nh ngử ờ ả ơ ủ ế ạ ữ
ng i đã đ ng viên, quan tâm h t m c đ n em trong su t quá trình th c hi n đ án. Đóườ ộ ế ự ế ố ự ệ ồ
là nh ng đ ng l c thúc đ y em c g ng h n, quy t tâm h n, đ cu i cùng em có đ cữ ộ ự ẩ ố ắ ơ ế ơ ể ố ượ
k t qu nh ngày hôm nay.ế ả ư
Em xin g i l i c m n đ n t t c .ử ờ ả ơ ế ấ ả
Sinh viên th c hi nự ệ
Nguy n Uy Danhễ
Ch ng I :ươ
Gi i thi u v đ tàiớ ệ ề ề
GVHD : TS. Nguyeãn Thieän Thaønh SVTH: Nguyeãn Uy Danh
1

Baùo caùo ñoà aùn moân hoïc I
I.Tóm t t đ tài đ án môn h c Iắ ề ồ ọ
1. Gi i thi u các module m ch c a đ tàiớ ệ ạ ủ ề
Đ tài đ án môn h c I c a em là : “ Đi u khi n ON_OFF t c đ đ ng c DC”. V i yêuề ồ ọ ủ ề ể ố ộ ộ ơ ớ
c u đ tài nh trên, h ng th c hi n đ tài c a em đ c tóm t t nh sau:ầ ề ư ướ ự ệ ề ủ ượ ắ ư
- S d ng vi đi u khi n PIC16F877A làm chip đi u khi n trung tâm.ử ụ ề ể ề ể
- Xây d ng bàn phím g m 13 phím. Trong đó:ự ồ
+1 phím đ đ ng th i reset vi đi u khi n và d ng đ ng c DCể ồ ờ ề ể ừ ộ ơ
+ 10 phím ng v i 10 s t 0 đ n 9 đ ng i dùng nh p t c đ đ tứ ớ ố ừ ế ể ườ ậ ố ộ ặ
+ 1 phím ra l nh đ ng c quay thu n (FORWARD)ệ ộ ơ ậ
+ 1 phím ra l nh đ ng c quay ng c (REVERSE)ệ ộ ơ ượ
- S d ng 8 led 7 đo n. Trong đóử ụ ạ
+ 4 led dùng đ ng i dùng nh p t c đ đ t mong mu nể ườ ậ ố ộ ặ ố
+ 4 led đ ng i dùng quan sát t c đ đo tr c ti p t đ ng cể ườ ố ộ ự ế ừ ộ ơ
- S d ng driver c u H L293D tr c ti p đi u khi n chi u quay, đóng ng tử ụ ầ ự ế ề ể ề ắ
đ ng c DCộ ơ
- Đ i t ng đi u khi n là đ ng c DC có g n encoder đ ng tr c.ố ượ ề ể ộ ơ ắ ồ ụ
- Ngoài ra, trên m ch còn có các linh ki n khác đ th c hi n truy n tín hi u gi aạ ệ ể ự ệ ề ệ ữ
vi đi u khi n trung tâm v i các thi t b hi n th nói trên.ề ể ớ ế ị ể ị
T t c các module m ch trên s đ c em trình bày rõ trong các ph n ti p theo c a đấ ả ạ ẽ ượ ầ ế ủ ề
tài.
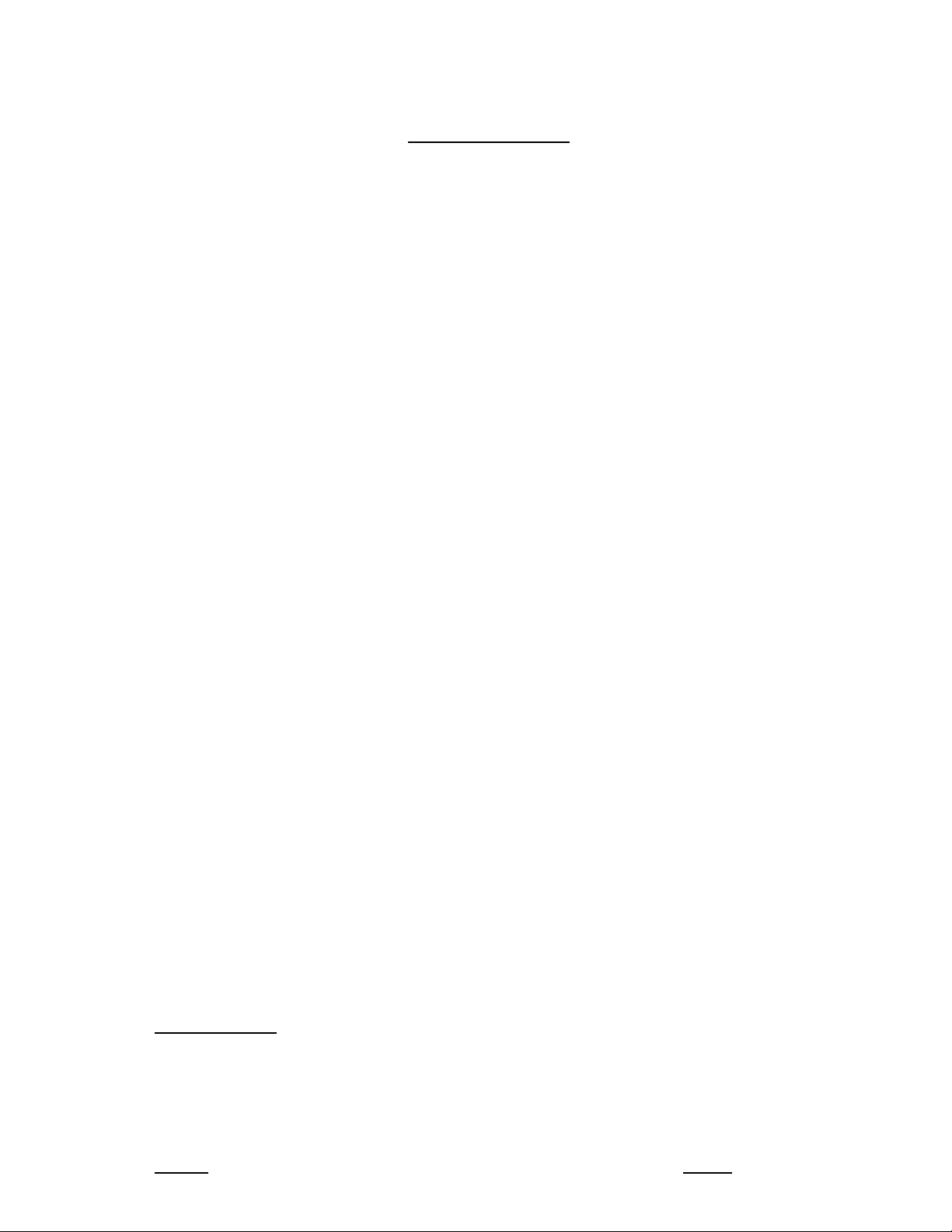
2. S đ nguyên lý k t n i các module trong m chơ ồ ế ố ạ
GVHD : TS. Nguyeãn Thieän Thaønh SVTH: Nguyeãn Uy Danh
2
Baùo caùo ñoà aùn moân hoïc I
3. Cách v n hành m chậ ạ
+ B c 1: ta s nh p t c đ đ t t bàn phím. T c đ đ t này g m có 4 ch s , sướ ẽ ậ ố ộ ặ ừ ố ộ ặ ồ ữ ố ẽ
hi n lên thông qua 4 led. Ta ph i nh n đ 4 con s thì m ch m i ho t đ ng đ c, n uệ ả ấ ủ ố ạ ớ ạ ộ ượ ế
không nh n đ m ch s “treo đó”, ch ng i dùng nh n s ti p. N u nh p sai t c đ ,ấ ủ ạ ẽ ờ ườ ấ ố ế ế ậ ố ộ
ta có th nh n phím reset đ nh p t c đ l i t đ u. N u nh n nh m sang các phímể ấ ể ậ ố ộ ạ ừ ầ ế ấ ầ
RESERVE ho c FORWARD tr c khi nh p đ 4 s ph n cài đ t t c đ thì ng iặ ướ ậ ủ ố ở ầ ặ ố ộ ườ
dùng hoàn toàn có th nh n l i mà không nh h ng đ n k t qu . ể ấ ạ ả ưở ế ế ả
+ B c 2: ta nh n ti p RESERVE hay FORWARD cho đ ng c ch y theo ý mu n.ướ ấ ế ộ ơ ạ ố
Trong quá trình đ ng c quay, vi đi u khi n s nh n liên t c nh n xung phát ra tộ ơ ề ể ẽ ậ ụ ậ ừ
encoder, tính toán ra t c đ và so sánh v i t c đ đ t ban đ u đ ra quy t đ nh ON_OFFố ộ ớ ố ộ ặ ầ ể ế ị
đ ng c . T c đ nh n v s đ c so sánh v i t c đ đ t c 1ms m t l n. Ngoài ra cộ ơ ố ộ ậ ề ẽ ượ ớ ố ộ ặ ứ ộ ầ ứ
1s thì vi đi u khi n s c p nh t t c đ th c c a đ ng c , th hi n ra 4 led 7 đo n đề ể ẽ ậ ậ ố ộ ự ủ ộ ơ ể ệ ạ ể
ng i dùng có th theo dõi và đánh giá.ườ ể
GVHD : TS. Nguyeãn Thieän Thaønh SVTH: Nguyeãn Uy Danh
3
Baùo caùo ñoà aùn moân hoïc I
II. Các yêu c u c a đ tàiầ ủ ề
1. Thông qua đ tài, làm quen v i cách th c đi u khi n đ i t ng đ ng c .ề ớ ứ ề ể ố ượ ộ ơ
2. Tìm hi u th c t các linh ki n, các lo i IC, ho t đ ng c a các lo i c m bi n….ể ự ế ệ ạ ạ ộ ủ ạ ả ế
3. Thi t k , thi công m ch đi u khi n và m ch đ ng l c đi u khi n đ ng c DCế ế ạ ề ể ạ ộ ự ề ể ộ ơ
4. Vi t ch ng trình cho vi đi u khi n PIC16F877A th c hi n thành công theo yêuế ươ ề ể ự ệ
c u đ ra.ầ ề
5. Đánh giá v sai s ,ch t l ng h th ng đi u khi nề ố ấ ượ ệ ố ề ể
6. Tìm hi u các h ng phát tri n c a đ tài, nâng cao ch t l ng c a h th ngể ướ ể ủ ề ấ ượ ủ ệ ố
Ch ng II : ươ
Gi i thi u v các linh ki n, ph n t s d ng trong m chớ ệ ề ệ ầ ử ử ụ ạ
I. Vi đi u khi n PIC16F877Aề ể
1. Khái quát v vi đi u khi n PIC16F877Aề ề ể
1.1.S đ chân và s đ nguyên lý c a PIC16F877Aơ ồ ơ ồ ủ
S đ chân ơ ồ
GVHD : TS. Nguyeãn Thieän Thaønh SVTH: Nguyeãn Uy Danh
4

Baùo caùo ñoà aùn moân hoïc I
S đ nguyên lý ơ ồ
GVHD : TS. Nguyeãn Thieän Thaønh SVTH: Nguyeãn Uy Danh
5




![Báo cáo thực tập tốt nghiệp Công ty TNHH Cơ điện Samwa Tek: [Mô tả chi tiết hơn về nội dung báo cáo nếu có thể]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/trantiendat_ct2/135x160/96461758161119.jpg)
![Báo cáo thực tập tại Garage Car Plus [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250810/nguyenanhquoc2809@gmail.com/135x160/25661754896300.jpg)



![Đồ án tốt nghiệp: Tính toán, kiểm tra hệ thống điều hòa không khí cho tòa nhà Depot Tham Lương [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250717/vijiraiya/135x160/40421752722146.jpg)














![Hệ thống điều khiển nhà thông minh: Luận văn tốt nghiệp [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260423/hoacattuong2026/135x160/35121777429487.jpg)
