
Báo Cáo Thực Tập Công Nhân
Trang 1
LỜI NÓI ĐẦU
Ngày nay, trong công cuộc công nghiệp hóa và hiện đại hóa cũng như
tiến trình hội nhập sâu vào nền kinh tế thế giới nói chung và các quốc gia
trong tố chức WTO nói riêng đặt ra cho nền kinh tế và sản xuất của chúng
ta cần phải đáp ứng được các yêu cầu chung của thế giới. Có thể nhận
thấy một điều là nền sản xuất của chúng ta hiện tại mang tính thủ công và
hết sức lạc hậu, do đó điều kiện cần và đủ để quá trình hội nhập thành
công là phải hiện đại hóa nền kinh tế, hiện đại hóa và tự động quá trình
sản xuất.
Lịch sử nhân loại đã chứng kiến những cuộc cách mạng về khoa học
kĩ thuật và gần đây nhất là cuộc cách mạng về công nghệ thông tin. Với
sự trợ giúp của máy tính và hệ thống máy tính, con người đã nâng cao
năng suất và tự động hóa ngày một hiệu quả hơn. Tuy nhiên, nói đến máy
tính thì trước hết phải nói đến một lĩnh vực quan trọng gấp bội, đó chính
là nền công nghiệp điện tử.
Nền công nghiệp điện tử và các sản phẩm của nó là nền tảng cơ bản
nhất cho việc ra đời của máy tính và sâu xa hơn chính là nên sản xuất
hiện đại ngày nay. Các sản phẩm của công nghiệp điện tử đã đi sâu vào
đời sống của mỗi quốc gia, vùng lãnh thổ và mỗi con người chúng ta.
Công nghiệp điện tử là lĩnh vực không thể thiếu đối với tất cả các khía
cạnh trong cuộc sống hiện đại nhân loại ngày nay.
Nằm trong chương trình đào tạo kĩ sư chuyên ngành cơ điện tử của
khoa cơ khí- trường đại học bách khoa đà nẵng, tôi đươc tham gia vào đợt
thực tập công nhân tại xưởng điện tử của trường. Với mục đích bổ sung
kiến thức và kĩ năng nghề nghịệp làm tiền đề cho quá trình công tác sau
này cũng như có thể đáp ứng yêu cầu của nền sản xuất nước nhà, nhóm

Báo Cáo Thực Tập Công Nhân
Trang 2
chúng tôi đã chọn đề tài: Thiết kế hệ thống băng tải đóng gói sản phẩm
điều khiển bằng bàn phím và giao tiếp máy tính. Đây là một đề tài có
khối lượng công việc khá lớn, bao gồm cả cơ khí và điện tử và lập trình
điều khiển, đòi hỏi sự chính xác cao và có thể ứng dụng trong nhiều lĩnh
vực mang lại hiệu quả cao.
Trong quá trình thực hiện đề tài, nhóm đã thiết kế và tính toán sao cho
quá trình làm việc của mô hình là tốt nhất, ổn định nhất, công năng nhiều
nhất. Tuy nhiên, nhóm cũng đã gặp nhiều khó khăn do vấn đề thời gian
và kinh nghiệm của nhóm nên mô hình vẫn gặp những vấn đề chưa thể
khắc phục. Nhóm cũng xin chân thành cảm ơn sự giúp đỡ tận tình của
thầy Lê Hồng Nam và các thầy cô trong khoa Điện Tử Viễn Thông và Cơ
Khí đã giúp nhóm hoàn thành đề tài một cách tốt nhất. Kính mong quý
thầy cô đóng góp những ý kiến để những đợt thực tập sau chúng tôi sẽ
hoàn thành nhiệm vụ tốt nhất.
Trân trọng và chân thành cảm ơn!
Nhóm thực hiện đề tài
Báo Cáo Thực Tập Công Nhân
Trang 3
CHƯƠNG I:
GIỚI THIỆU TỔNG QUAN VỀ ĐỀ TÀI
1.1 Giới thiệu đề tài
Thiết kế hệ thống gồm hai băng tải đóng gói sản phẩm điều khiển
bằng bàn phím và giao tiếp máy tính
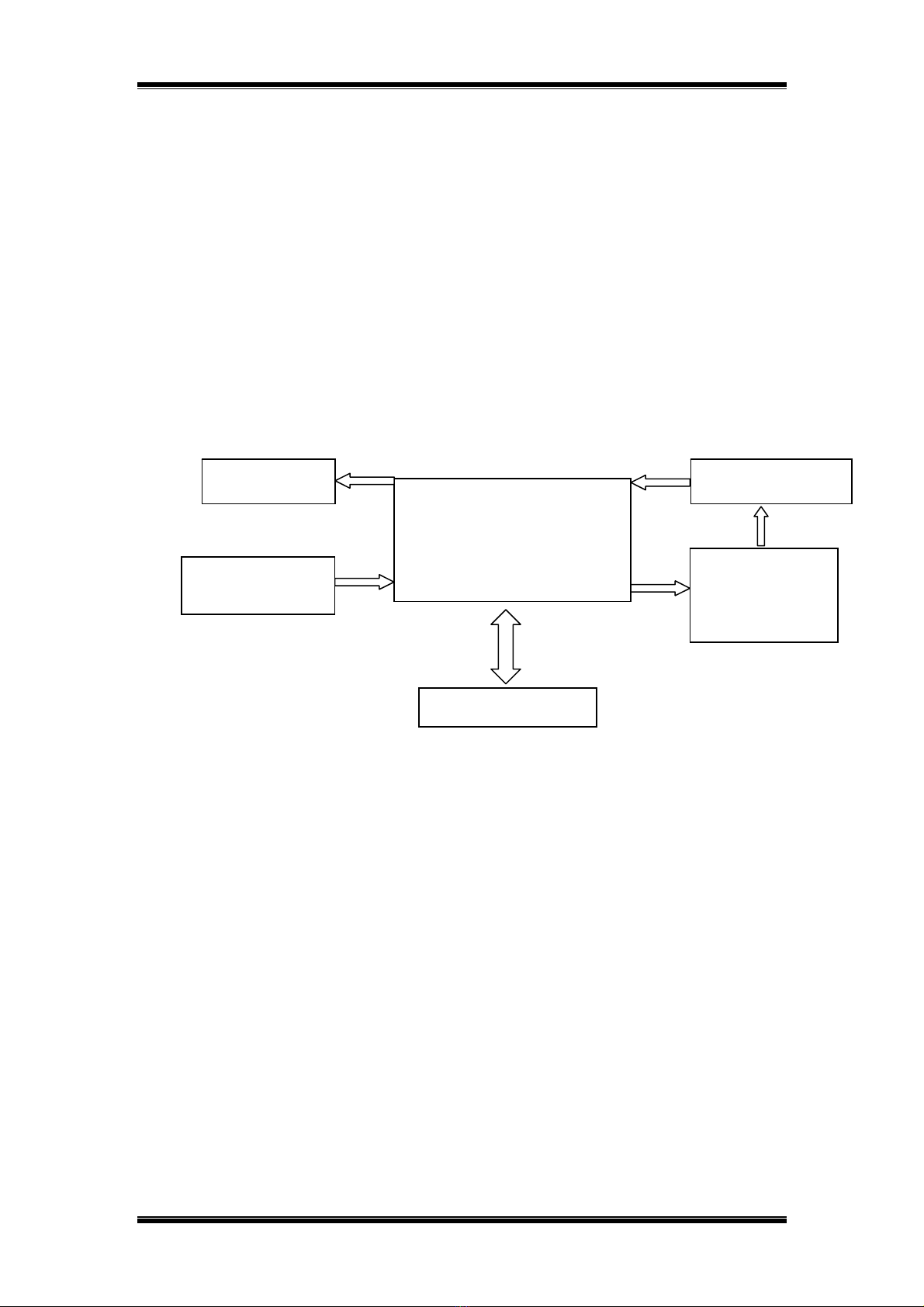
1.2 Sơ đồ khối của đề tài.
1.3 Chức năng các khối :
• Giao tiếp máy tính : Dùng giao diện phần mềm lập trình bằng
delphi trên máy tính để giao tiếp với mạch điều khiển qua đó điều
khiển và kiểm soát số sản phẩm và số thùng.
• Mạch điều khiển : Điều khiển tất cả hoạt động của máy, nhận tín
hiệu điều khiển từ bàn phím và máy tính để xử lý rồi đưa ra tín
hiệu điều khiển cho cơ cấu chấp hành. Kiểm tra tín hiệu trả về của
cảm biến để giám sát hoạt động của máy, đưa số liệu ra mạch hiển
thị và đưa về máy tính. Đồng thời xử lý tính toán dựa vào các dữ
liệu thu về từ cảm biến và các tín hiệu điều khiển để xuất tín hiệu
điều khiển cơ cấu chấp hành cho phù hợp với yêu cầu.
CẢM BIẾN
BÀN PHÍM
KHỐI ĐIỀU
ĐIỀU KHIỂN
HIỂN THỊ
CƠ CẤU
CHẤP
HÀNH
MÁY TÍNH

Báo Cáo Thực Tập Công Nhân
Trang 4
• Cảm biến : Gồm 2 cảm biến quang trở được bố theo hành trình của
sản phẩm và thùng để đếm số thùng và số sản phẩm có đủ hay
không.
• Bàn phím : Để nhập số sản phẩm và số thùng đồng thời thực hiện
một số chức năng điều khiển cụ thể (sẽ được làm rõ ở phần sau).
• Hiển thị : Để hiển thị số sản phẩm và số thùng
• Cơ cấu chấp hành : Gồm các cơ cấu cơ khí ( 2 băng tải) và 2 động
cơ DC để truyền động cho các cơ cấu cơ khí ( 2 băng tải). Một
băng tải mang sản phẩm và một băng tải mang thùng.
Báo Cáo Thực Tập Công Nhân
Trang 5
CHƯƠNG II : LÝ THUYẾT
VI ĐIỀU KHIỂN 8951
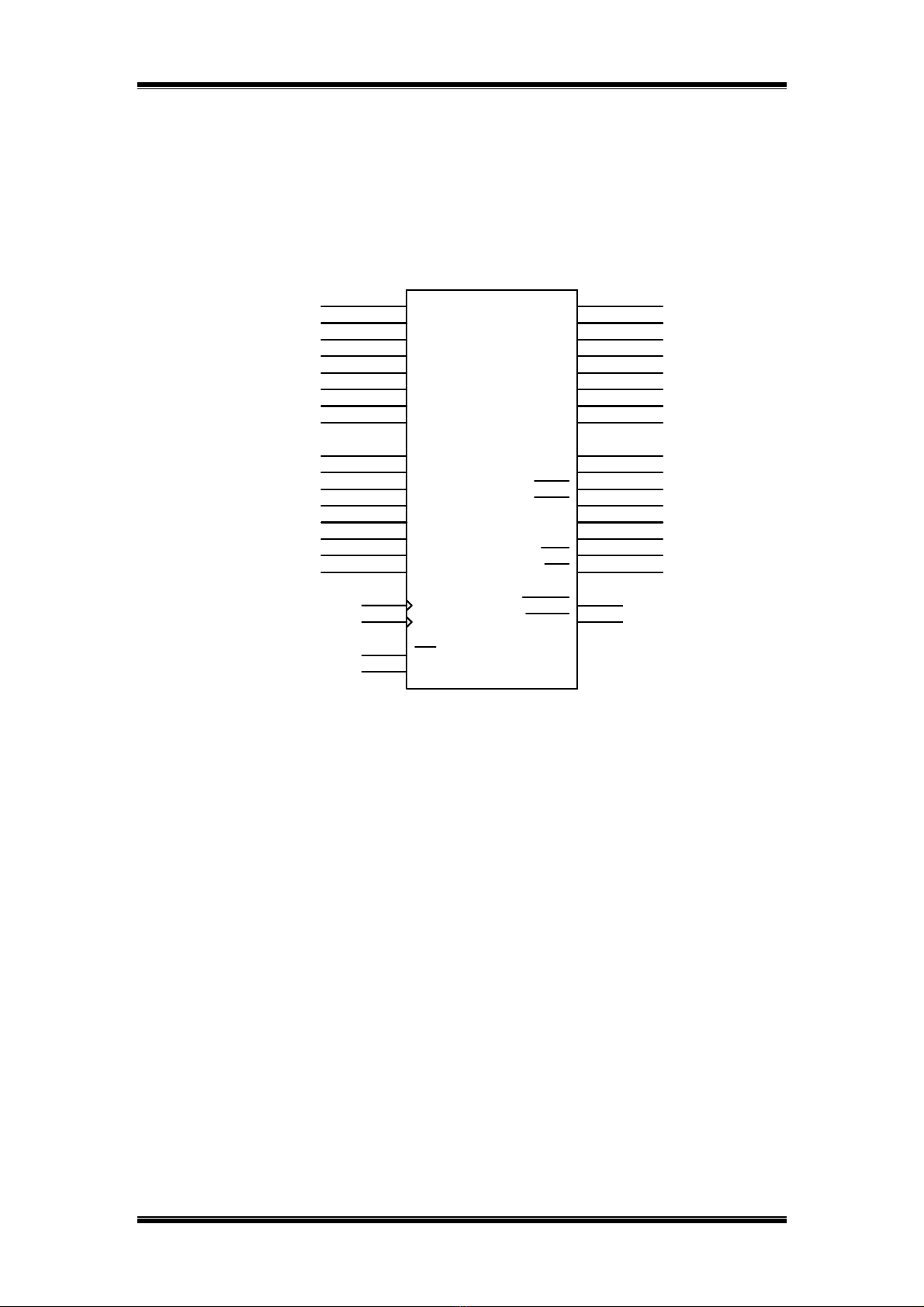
1. Kiến trúc của vi điều khiển 8951
IC vi điều khiển 8951 thuộc họ MCS51 có các đặc điểm sau :
+ 4 kbyte Flash.
+ 128 byte RAM
+ 4 port I/0 8 bit
+ Hai bộ định thời 16 bits
+ Giao tiếp nối tiếp
+ 64KB không gian bộ nhớ chương trình ngoài
+ 64 KB không gian bộ nhớ dữ liệu ngoài
a.Port0: là port có 2 chức năng, ở trên chân từ 32 đến 39 của MC
8951. Trong các thiết kế cỡ nhỏ không dùng bộ nhớ ngoài, P0 được sử
dụng như là những cổng I/O. Còn trong các thiết kế lớn có yêu cầu một
số lượng đáng kể bộ nhớ ngoài thì P0 trở thành các đường truyền dữ liệu
và 8 bit thấp của bus địa chỉ.
b. Port1: là một port I/O chuyên dụng, trên các chân 1-8 của
MC8951. Chúng được sử dụng với một múc đích duy nhất là giao tiếp
với các thiết bị ngoài khi cần thiết.
U1
AT89C51
9
18
19
29
30
31
1
2
3
4
5
6
7
8
21
22
23
24
25
26
27
28
10
11
12
13
14
15
16
17
39
38
37
36
35
34
33
32
RST
XTAL2
XTAL1
PSEN
ALE/PROG
EA/VPP
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
P2.0/A8
P2.1/A9
P2.2/A10
P2.3/A11
P2.4/A12
P2.5/A13
P2.6/A14
P2.7/A15
P3.0/RXD
P3.1/TXD
P3.2/INT0
P3.3/INT1
P3.4/T0
P3.5/T1
P3.6/WR
P3.7/RD
P0.0/AD0
P0.1/AD1
P0.2/AD2
P0.3/AD3
P0.4/AD4
P0.5/AD5
P0.6/AD6
P0.7/AD7
AT89C51




![Báo cáo thực tập tốt nghiệp Công ty TNHH Cơ điện Samwa Tek: [Mô tả chi tiết hơn về nội dung báo cáo nếu có thể]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/trantiendat_ct2/135x160/96461758161119.jpg)
![Báo cáo thực tập tại Garage Car Plus [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250810/nguyenanhquoc2809@gmail.com/135x160/25661754896300.jpg)



![Đồ án tốt nghiệp: Tính toán, kiểm tra hệ thống điều hòa không khí cho tòa nhà Depot Tham Lương [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250717/vijiraiya/135x160/40421752722146.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)