Nghiên cứu điều khiển con lắc ngược GVHD: Th.s Nguyễn Đức Hoàng
1
ĐẠI HỌC BÁCH KHOA – ĐẠI HỌC QUỐC GIA TP HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN ĐIỀU KHIỂN TỰ ĐỘNG
------------------
ĐỒ ÁN MÔN HỌC 2
NGHIÊN CỨU ĐIỀU KHIỂN CON
LẮC NGƯỢC TỊNH TIẾN
GVHD: Thạc sĩ Nguyễn Đức Hoàng
SVTH : Đinh Thị Hướng Tâm
MSSV : 40902334
Năm học 2012 - 2013

Nghiên cứu điều khiển con lắc ngược GVHD: Th.s Nguyễn Đức Hoàng
2
Lời mở đầu
Đi u hi n h th ng on ngư m t trong nh ng v n inh i n nh v i u
hi n t ng Với mong mu n m t m h nh th t n ịnh o v h nh x
th i m h ng i thuy t i u hi n h ID Fuzzy N ur N twor thuy t
i u khi n hi n i ng th i ng th p ng thuy t nh n ng ướ ư ng i
m h nh to n h h th ng n y th s u ho ng th i gi n 3 th ng th hi n th m h nh
ng t ư th nh ng m nh t ịnh n o M ti u h nh t i t m hi u,
thi t k v h o s t hi u qu c b i u khi n gi ân b ng on i m m vi
t nh Vi thi t p b i u hi n v thu th p i u ư th hi n th ng qu thư vi n a
Matlab Simulink.
Em xin gửi l i c m ơn n gi o vi n hướng dẫn, thầy Nguyễn Đ Ho ng v s hướng dẫn c a
thầy trong su t th i gi n qu B n nh m ng mong nh n ư i n ng như ịnh
hướng c a thầy ho n th nh t t lu n văn t t nghi p trong th i gian s p tới.
Đinh Thị Hướng Tâm
Tp. HCM ng y 16 th ng 06 năm 2013

Nghiên cứu điều khiển con lắc ngược GVHD: Th.s Nguyễn Đức Hoàng
3
MỤC LỤC
Lời mở đầu _________________________________________ 2
PHẦN 1. TỔNG QUAN VỀ ĐỀ TÀI ________________ 4
I. Giới thi u t i: ______________________________________________________________4
II. Giới h n c t i: ___________________________________________________________5
PHẦN 2. THỰC HIỆN ĐỀ TÀI ____________________ 6
I. M h nh to n h on ngư tuy n t nh: ________________________________________6
1.1. C u t o v th ng s c a con l ngư c : _______________________________________6
1 2 Xây ng m h nh to n h c con l ngư c: _______________________________________7
II. Thi t b i u hi n:______________________________________________________8
2 1 Đi u khi n h th ng con l ngư c sử d ng b i u khi n PID: _______________________8
2 2 Đi u khi n h th ng con l ngư c sử d ng b i u khi n to n phương tuy n t nh LQR: __13
2.3. Đi u khi n h th ng con l ngư c sử d ng b i u khi n PD m : ___________________19
PHẦN 3. TỔNG KẾT VÀ NHẬN XÉT _____________ 20
I. Nh n xét v ưu huy t i m phương ph p nghi n u: _____________________20
1.1 B i u hi n ID: _______________________________________________________20
1.2 B i u khi n to n phương tuy n t nh LQR : __________________________________20
II. Hướng ph t tri n t i : _______________________________________________________20
Nghiên cứu điều khiển con lắc ngược GVHD: Th.s Nguyễn Đức Hoàng
4
PHẦN 1. TỔNG QUAN VỀ ĐỀ TÀI
I. Giới thiệu đề tài:
Th i i ng y n y với s ph t tri n m nh mẽ c a khoa h c kỹ thu t ặc bi t trong
nh v i u khi n t ng, ng y ng th m nhi u thuy t i u khi n hi n i b n nh
thuy t inh i n t n t i trong th i gian qua. Từ nhi u phương ph p i u khi n
mới ư p d ng ho i tư ng i u khi n ph c t p. Tuy nhi n hầu h t thuy t
i u khi n n y u r t ph c t p v trừu tư ng o ngư i h c mu n hi u ư c c th n i
dung c a từng thuy t th ngo i vi t m hi u kỹ v thuy t, cần ph i m h nh th c t
ki m nghi m l i thuy t M t trong m h nh ph bi n ư ùng kh o s t
thuy t i u khi n ư c sử d ng hầu h t trư ng i h tr n th giới m h nh on c
ngư c (Inverted Pendulum). Mặ ù tr n th giới ng m t s nh ung p thi t bị
d y h h t o m h nh on ngư c với h nh x v tin y o Tuy nhi n với
mong mu n t xây ng m t m h nh th nghi m d tr n nh ng ki n th ưới s
hướng dẫn c a thầy, m th c hi n t i “Nghi n u i u khi n con l ngư c tịnh ti n”
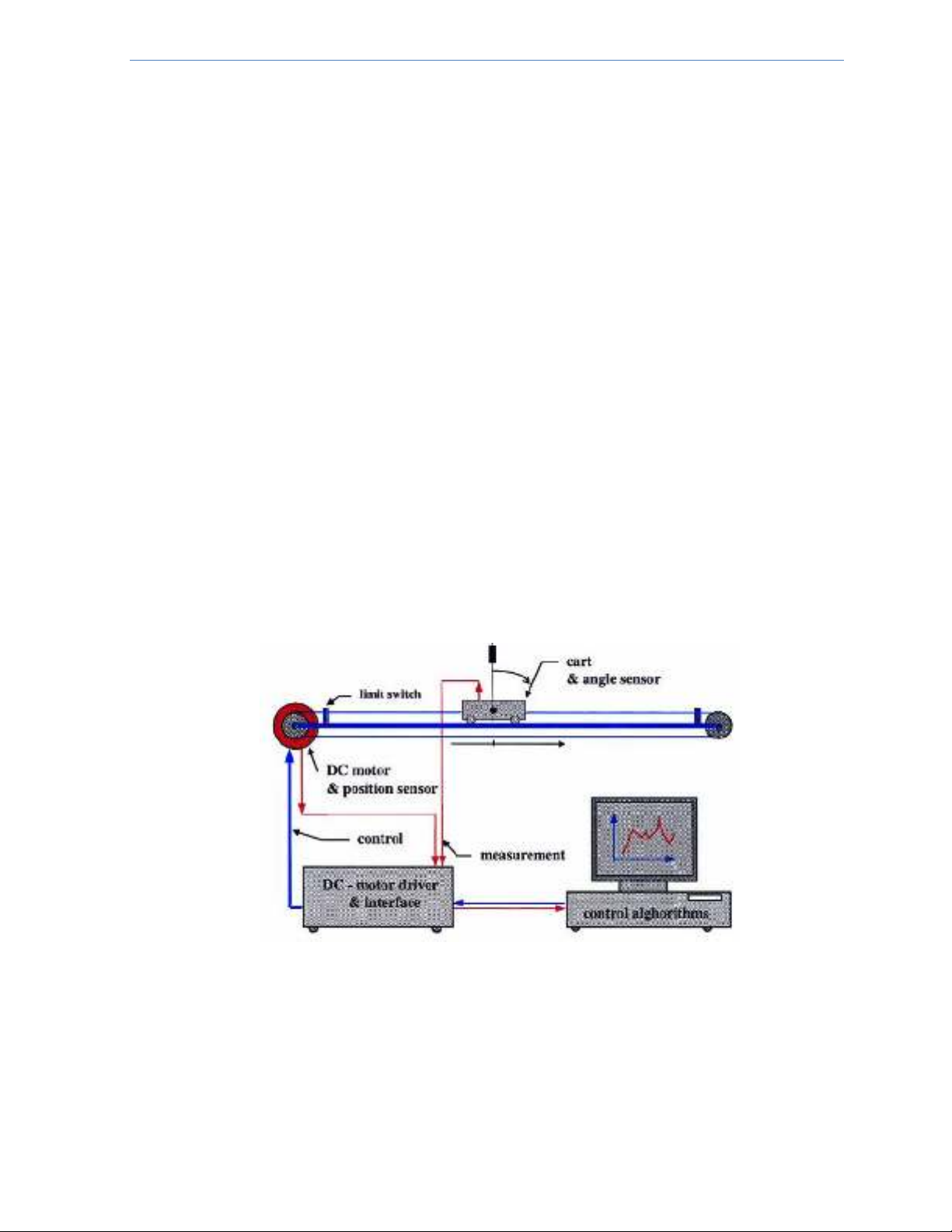
M h nh x on ngư c (Pendulum- Cart System):
H nh 1 1 M t t ng quan v h con l ngư c chuy n ng ngang:
Hình 1.1: Mô hình xe con lắc ngược
V t ng quan, h xe con l ngư c bao g m m t con l c chuy n ng t o ư c g n
tr n x th ng qu hớp xo y x th di chuy n dễ ng c theo m t thanh ray. Vị tr a
chi x n y ư i u khi n b i m t ng ơ DC truy n ng qu ây uro Ngõ r c a h
th ng vị tr a chi x v g ch c a con l u ư c h i ti p v b i u khi n.

Nghiên cứu điều khiển con lắc ngược GVHD: Th.s Nguyễn Đức Hoàng
5
Ưu i m: Dễ thi t k phần ơ h vi i ây t n hi u gi a c m bi n g a con l c tới
m h i u khi n h ơn gi n.
Như i m:
Bị giới h n v h ng gian di chuy n c a xe.
K t c u ph c t p, chi m h ng gi n
II. Giới hạn của đề tài:
Do nh hư ng c a m t s y u t ch quan (ki n th huy n m n th i gian th c hi n
t i vv m trong n i dung th c hi n c t i hỉ c p ch y u n i ung s u ây:
M phỏng ặ t nh ng h c c a h th ng con l ngư v m phỏng phương n thi t
k b i u khi n PID, b i u khi n LQR v b i u khi n PD m .
Thi t k b i u khi n cho m h nh on ngư c:
C v n i u khi n i n qu n n m h nh on ngư c bao g m:
B i u khi n Swing-up: t ng t ng ư on c từ vị tr “h nging- own” n
vị tr “up-right position”
B i u khi n gi ân b ng (Stabilizing Controller): gi con l c vị tr ân b ng.
Trong ph m vi nghi n u c t i n y hỉ xoay quanh v n Thiết kế bộ điều khiển giữ
cân bằng cho hệ con lắc.
Đ nh gi t qu thu ư v ư r hướng ph t tri n ho n thi n vi i u khi n m
h nh.






![Robot tự vận hành: Đề tài nghiên cứu khoa học [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240119/boghoado07/135x160/896608541.jpg)






![Thiết kế mạch điện tử: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250930/ngotien0801@gmail.com/135x160/55401759287195.jpg)