
3./Đ ng H c Thu n: ộ ọ ậ
Qui T c Denavit-Hartenbergắ
B c 1: ướ Xác đ nh các tr c kh p và đ t tên t ng ngị ụ ớ ặ ươ ứ
10 −n
zz
.
B c 2: ướ Xác l p h t a đ n n. Đ t g c c a h t a đ này t i b t kỳ đi m nào trênậ ệ ọ ộ ề ặ ố ủ ệ ọ ộ ạ ấ ể
tr c ụ
0
z
. Các tr c ụ
0
x
và
0
y
đ c ch n th a qui t c tam di n thu n. ượ ọ ỏ ắ ệ ậ
L p ặ
1,...,1 −= ni
l n th c hi n b c 3 đ n b c 5.ầ ự ệ ướ ế ướ
B c 3:ướ Xác đ nh các g c ị ố
i
O
là giao đi m c a đ ng vuông góc chung gi aể ủ ườ ữ
i
z
và
1−i
z
v i ớ
i
z
. N u ế
i
z
giao v i ớ
1−i
z
, đ t ặ
i
O
t i giao đi m này. N uạ ể ế
i
z
song song v i ớ
1−i
z
, đ tặ
i
O
t i b t kỳ v trí nào trên ạ ấ ị
i
z
sao cho thu n ti n.ậ ệ
B c 4:ướ Xác đ nh ị
i
x
d c theo đ ng vuông góc chung gi a ọ ườ ữ
1−i
z
và
i
z
đi qua
i
O
, ho cặ
theo h ng vuông góc v i m t ph ng t o b i ướ ớ ặ ẳ ạ ở
1−i
z
và
i
z
n u ế
1−i
z
và
i
z
giao nhau.
B c 5:ướ Xác đ nh ị
i
y
th a qui t c tam di n thu n.ỏ ắ ệ ậ
B c 6ướ : Xác đ nh h t a đ tác đ ng cu i ị ệ ọ ộ ộ ố
nnnn zyxo
. Gi s kh p ả ử ớ
n
là kh p quay,ớ
đ t ặ
azn=
d c theo h ng ọ ướ
1−n
z
. Xác đ nh g c ị ố
n
O
b t kỳ trên ấ
n
z
sao cho thu n ti n,ậ ệ
th ng là tâm c a b k p hay t i đ u d ng c mà tay máy ph i mang. Đ t ườ ủ ộ ẹ ạ ầ ụ ụ ả ặ
syn=
theo h ng k p và đ t ướ ẹ ặ
n
x
theo
as x
. N u d ng c k p không đ n gi n thì đ t ế ụ ụ ẹ ơ ả ặ
n
x
và
n
y
t o thành tam di n thu n.ạ ệ ậ
B c 7ướ : L p b ng tham s ch các khâu trên robotậ ả ố
i
a
: kho ng cách theo ph ng ả ươ
i
x
t ừ
i
O
đ n giao đi m c a các tr c ế ể ủ ụ
i
x
và
1−i
z
.
i
d
: kho ng cách theo ph ng ả ươ
1−i
z
t ừ
1−i
O
đ n giao đi m c a các tr c ế ể ủ ụ
i
x
và
1−i
z
,
i
d
thay đ i khi kh p ổ ớ
i
là kh p tr t.ớ ượ
i
α
: là góc quay quanh tr c ụ
i
x
t ừ
1−i
z
đ n ế
i
z
.
i
θ
: là góc quay quanh tr cụ
1−i
z
t ừ
1−i
x
đ n ế
i
x
.
B c 8ướ : T các ma tr n bi n đ i thu n nh t ừ ậ ế ổ ầ ấ
i
A
b ng cách thay các tham s trên vào.ằ ố
B c 9ướ : Tính
nn AAT
1
0=
. Ma tr n này cho ta bi t đ c v trí và h ng đ i v i hậ ế ượ ị ướ ố ớ ệ
t a đ n n c a d ng c g n trên khâu cu i. ọ ộ ề ủ ụ ụ ắ ố
Ví d 3.1:ụ
1
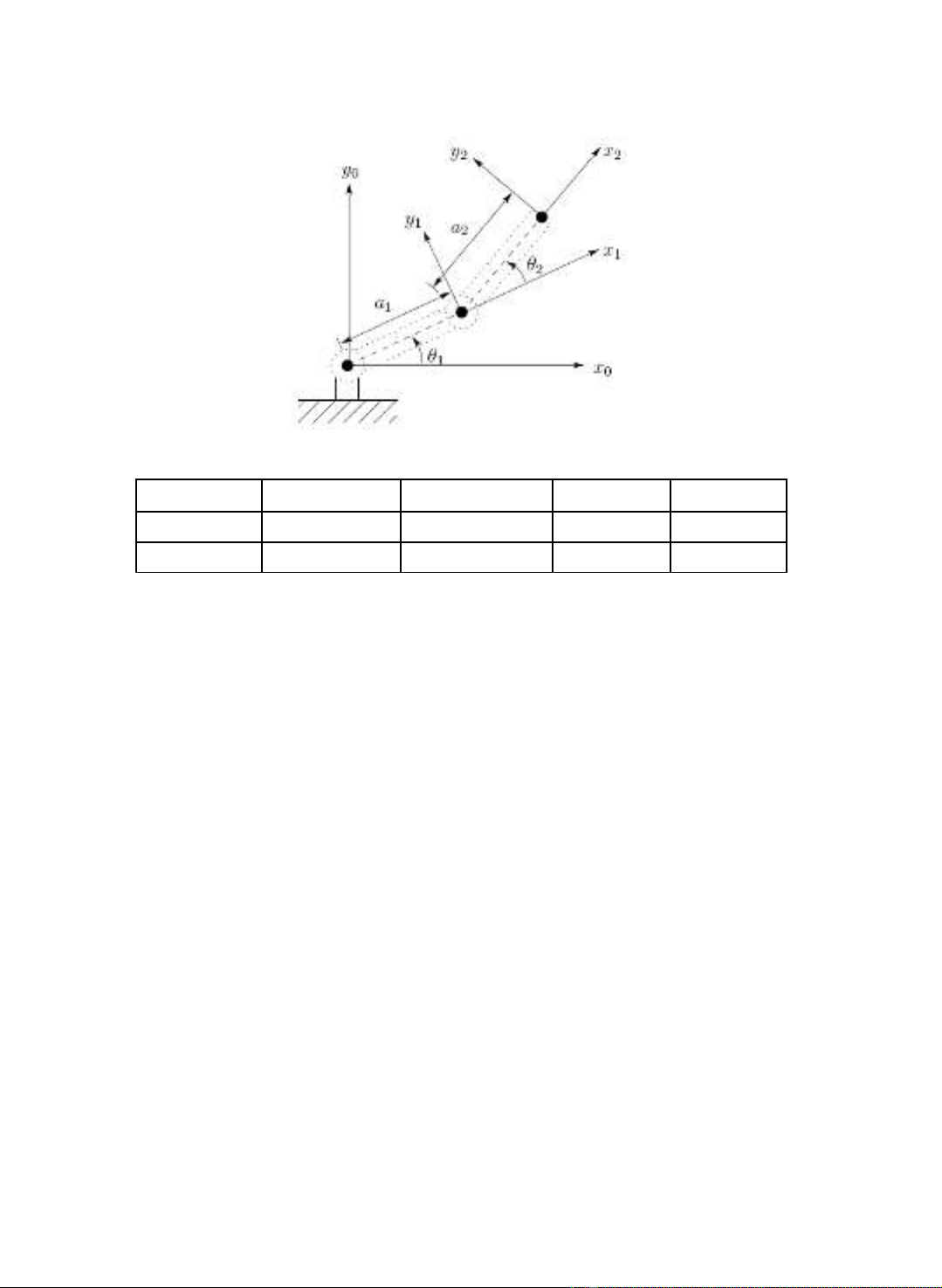
Hình 3.1: Tay máy hai khâu ph ng.ẳ
B ng tham s khâu cho robot 2 khâu đ ng ph ngả ố ồ ẳ
Khâu
i
a
i
α
i
d
i
θ
1
1
a
0 0
1
θ
2
2
a
0 0
2
θ
−
=
−
=
1000
0100
0
0
1000
0100
0
0
2222
2222
2
1111
1111
1
sacs
casc
A
sacs
casc
A
Ma tr n bi n đ i thu n nh tậ ế ổ ầ ấ
+
+−
==
1000
0100
0
0
122111212
122111212
21
0
2
sasacs
cacasc
AAT
L u ý r ng 2 thành ph n đ u c a c t cu i cùng c a ư ằ ầ ầ ủ ộ ố ủ
0
2
T
là v trí x và y c a ị ủ
2
O
.
12211
12211
sasay
cacax
+=
+=
2
Ph n quay c a ầ ủ
0
2
T
cho h ng c a ướ ủ
2222 zyxo
đ i v i h t a đ n n.ố ớ ệ ọ ộ ề
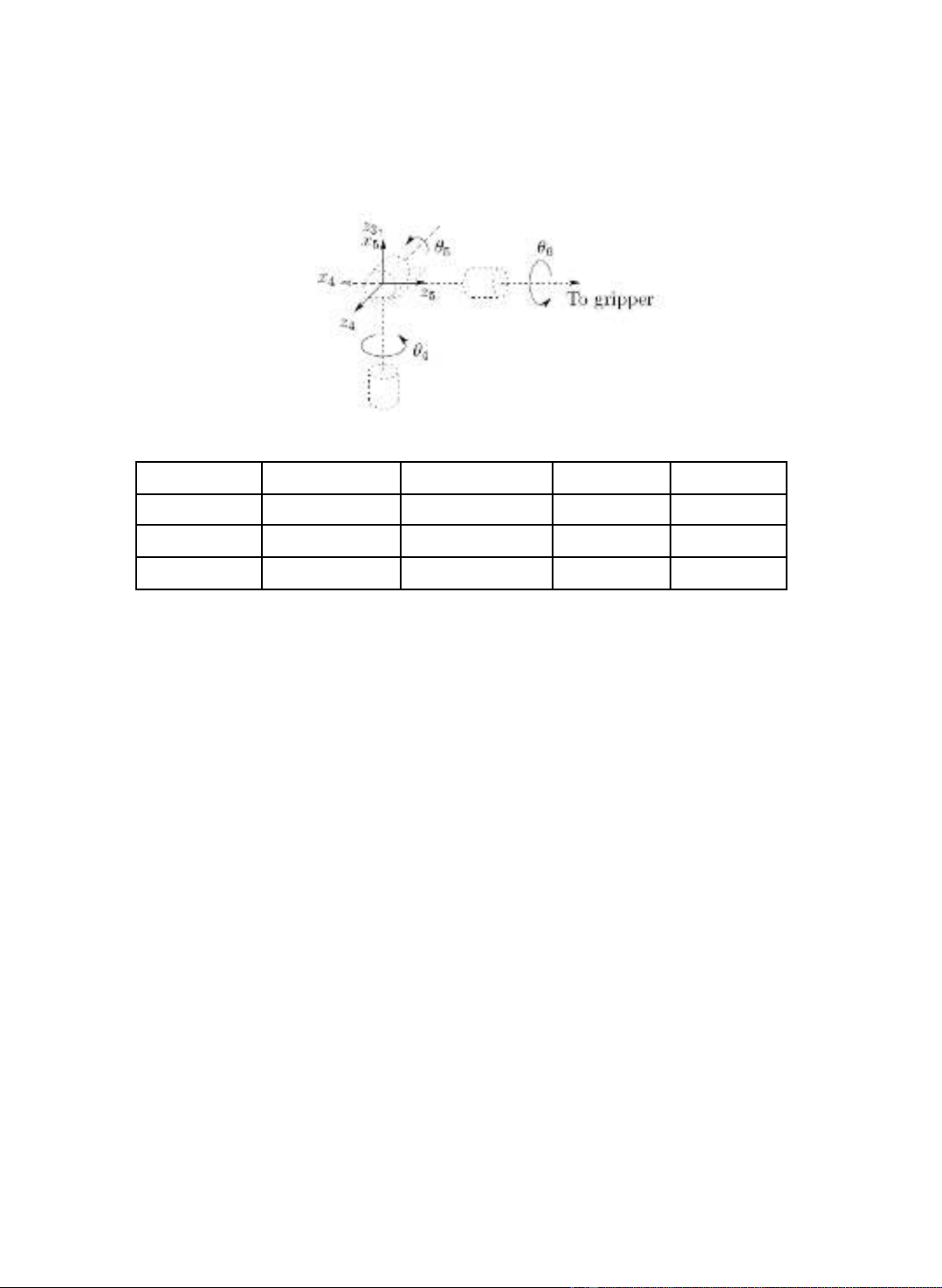
Ví d 3.2:ụ C tay kh p c u (Spherical Wrist)ổ ớ ầ
Tr c ụ
543 ,, zzz
đ ng quy t i đi m ồ ạ ể
O
. Tay máy Stanford có c tay thu c d ng này.ổ ộ ạ
Hình 3.2: Gán h tr c t a đ cho c tay kh p c uệ ụ ọ ộ ổ ớ ầ .
B ng 3.2ả: Tham s DH cho c tay kh p c u.ố ổ ớ ầ
Khâu
i
a
i
α
i
d
i
θ
4 0 -90 0
4
θ
5 0 90 0
5
θ
6 0 0
6
d
6
θ
Ta th y r ng ba bi n kh p cu i ấ ằ ế ớ ố
654
,,
θθθ
là các góc Euler
ψθφ
,,
t ng ng đ i v i hươ ứ ố ớ ệ
t a đ ọ ộ
3333 zyxO
. Ta có
−
−
=
1000
0010
00
00
44
44
4
cs
sc
A
;
−
−
=
1000
0010
00
00
55
55
5
cs
sc
A
;
−
=
1000
100
00
00
6
66
66
6d
cs
sc
A
−
+−+
−−
=
==
1000
10 6556565
654546465464654
6545465464654
3
6
3
6
654
3
6dccsscs
dssssccscsscccs
dscscsccssccc
OR
AAAT
So sánh ph n ma tr n quay ầ ậ
3
6
R
c a ủ
3
6
T
v i phép bi n đ i góc Euler. Đi u đó cho th yớ ế ổ ề ấ
r ng vai tròằ
654
,,
θθθ
hoàn toàn gi ng v i các góc Euler ố ớ
ψθφ
,,
đ i v i h t a đố ớ ệ ọ ộ
3333 zyxO
.
NL: Các góc Euler
Xét h t a đ c đ nh ệ ọ ộ ố ị
0000 zyxO
và h t a đ quay ệ ọ ộ
1111 zyxO
nh n đ c b i vi c th cậ ượ ở ệ ự
hi n 3 phép quay sau:ệ
3
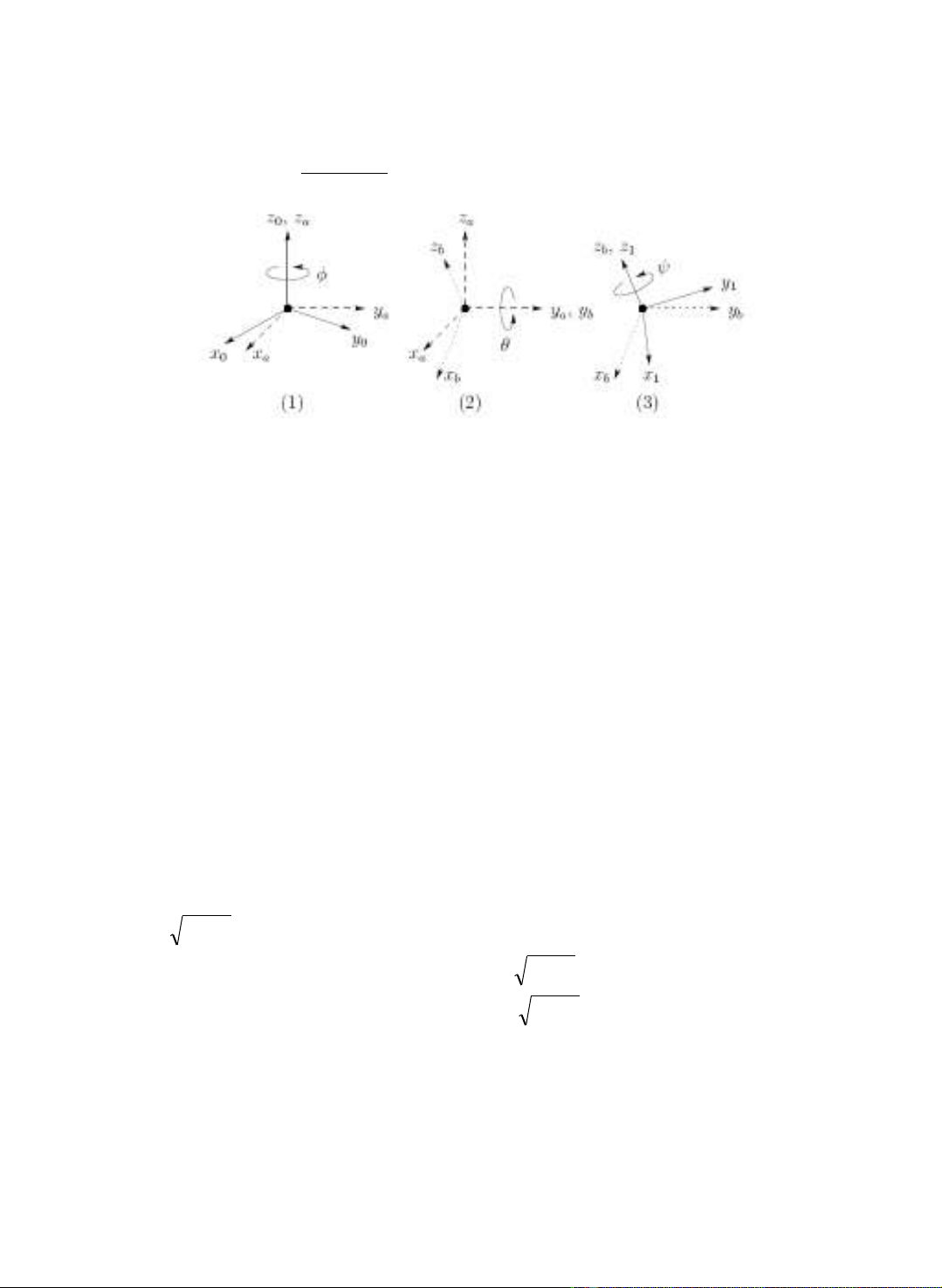
(1) Quay quanh tr c ụ
z
m t góc ộ
φ
;
(2) Quay quanh tr c ụ
y
hi n hànhệ m t góc ộ
θ
;
(3) Quay quanh tr c ụ
z
hi n hành m t góc ệ ộ
ψ
Hình 3.3: S bi u di n các góc Eulerự ể ễ
Ma tr n bi n đ i ậ ế ổ
−
+−+
−−−
=
−
−
−
=
=
θψθψθ
θφψφψθφψφψθφ
θφψφψθφψφψθφ
ψψ
ψψ
θθ
θθ
φφ
φφ
ψθφ
csscs
ssccscsscccs
sccssccssccc
cs
sc
cs
sc
cs
sc
RRRR zyz
100
0
0
0
010
0
100
0
0
,,,
0
1
Bây gi xét bài toán xác đ nh các góc ờ ị
ψθφ
,,
khi cho tr c ma tr n quayướ ậ
=
333231
232221
131211
rrr
rrr
rrr
R
Gi s r ng c hai ph n t ả ử ằ ả ầ ử
2313 ,rr
đ u không b ng 0. Có nghĩa là ề ằ
0
≠
θ
s
và vì th cế ả
3231,rr
đ u không b ng 0. N u c ề ằ ế ả
2313 ,rr
đ u không b ng 0 thì ề ằ
1
33 ±≠r
và ta có
33
rc =
θ
,
2
33
1rs −±=
θ
, nh v y ta cóư ậ
()
2
3333 1,tan rrA −=
θ
(3.1)
hay
()
2
3333 1,tan rrA −−=
θ
(3.2)
Tùy vào d u c a các tham s mà hàm Atan s ch n góc ph n t cho góc ấ ủ ố ẽ ọ ầ ư
θ
. N u cế ả
hai tham s b ng 0, thì hàm Atan không xác đ nh.ố ằ ị
N u ế
0
2313 == rr
, thì
1
33 ±=r
và
0
3231 == rr
. Vì v y ậ
R
có d ngạ
4

±
=
100
0
0
2221
1211
rr
rr
R
N u ế
1
33 =r
thì
1
=
θ
c
và
0
=
θ
s
, k t qu là ế ả
0
=
θ
. Trong tr ng h p này ườ ợ
0
1
R
tr thànhở
=
++
+−+
=
+−+
−−−
=
333231
232221
131211
0
1
100
0)()(
0)()(
100
0
0
rrr
rrr
rrr
cs
sc
ccsssccs
csscsscc
R
ψφψφ
ψφψφ
ψφψφψφψφ
ψφψφψφψφ
),tan(),tan( 12112111 rrArrA −==+⇒
ψφ
Có vô s nghi m trong tr ng h p này. Ta có th l y ố ệ ườ ợ ể ấ
0=
φ
, và xác đ nh ị
ψ
.
N u ế
1
33 −=r
, thì
1
−=
θ
c
và
0
=
θ
s
, k t qu là ế ả
πθ
=
. Ta có
=
−−
−−−−
=
333231
232221
131211
0
1
100
0)()(
0)()(
rrr
rrr
rrr
cs
sc
R
ψφψφ
ψφψφ
),tan(),tan( 12112111 rrArrA −−=−−=−⇒
ψφ
Cũng có vô s nghi m trong tr ng h p này.ố ệ ườ ợ
0
4./Đ ng h c ngh chộ ọ ị
(Inverse kinematics)
5







![Bài giảng Kỹ thuật robot [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/vijiraiya/135x160/366_bai-giang-ky-thuat-robot.jpg)
















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)