2
MỤC LỤC
Chương 1: TỔNG QUAN VỀ ROBOT HÚT BỤI .......................................................... 3
1.1 Vấn đề về robot hút bụi di động ............................................................................. 3
1.2 Một số robot hút bụi hiện nay ................................................................................ 3
1.3 Mục tiêu và phạm vi đề tài ..................................................................................... 6
Chương 2: THIẾT KẾ CƠ KHÍ ....................................................................................... 7
2.1 Sơ đồ của robot hút bụi: ......................................................................................... 7
2.2 Thiết kế từng cụm của robot hút bụi: ..................................................................... 8
Chương 3: THIẾT KẾ GIẢI THUẬT ĐIỀU KHIỂN .................................................... 14
3.1 Bài toán quỹ đạo di chuyển của robot .................................................................. 14
3.2 Mô hình hóa ......................................................................................................... 14
3.3 Giải thuật điều khiển ............................................................................................ 16
3.4 Phương pháp đo và phát hiện sai số ..................................................................... 16
3.5 Kết quả mô phỏng: ............................................................................................... 17
Chương 4: ĐÁNH GIÁ VÀ HƯỚNG PHÁT TRIỂN ................................................... 18
4.1 Kết luận ................................................................................................................ 18
4.2 Hạn chế của robot hút bụi .................................................................................... 18
4.3 Đề xuất hướng nghiên cứu ................................................................................... 18
Tài liệu tham khảo ............................................................................................................. 19
Phục lục ...................................................................................................................... 20

3
Chương 1: TỔNG QUAN VỀ ROBOT HÚT BỤI
1.1 Vấn đề về robot hút bụi di động
Cùng với sự phát triển của công nghệ và máy móc hiện đại, các robot đang được ứng
dụng rộng rãi trong các sản phẩm gia dụng. Trong đó, robot hút bụi là sản phẩm kết hợp hệ
thống hút bụi và lập trình di chuyển để tiến hành hút bụi được sử dụng ngày càng nhiều
trong dân dụng.
Nắm bắt được những nhu cầu trên, robot hút bụi đã được nghiên cứu, phát triển trên
thế giới từ những năm 1995. Đến nay, robot hút bụi đã được sản xuất nhằm đáp ứng nhu
cầu của con người với các hãng sản xuất như: Samsung, LG, Sanyo…
Với mục tiêu hoạt động trong nhà, robot hút bụi được thiết kế nhỏ gọn để hoạt động
được ở những nơi con người ít khi tiếp xúc lau dọn như: gầm giường, ghế, sofa, bàn nhỏ…
Đồng thời, robot hút bụi cũng có khả năng phát hiện và tránh vật cản, chống rơi.. để thích
hợp hoạt động trong nhà. Tuy nhiên, phải di chuyển khi hoạt động nên nguồn nuôi của robot
là pin hoặc acquy nên thời gian hoạt động và công suất hút bụi của robot bị bạn chế.
Để khắc phục bất tiện do nguồn nuôi và tăng khả năng tương tác với người dùng,
hiện nay các sản phẩm robot hút bụi được nghiên cứu, chế tạo theo hướng thông minh như:
tự động sạc nguồn điện khi yếu nguồn, chức năng hẹn giờ, lưu bản đồ đường đi...
Hiện nay, robot hút bụi đã được nhập khẩu và sử dụng ở Việt Nam. Tuy nhiên, chưa
có nghiên cứu trong nước nào thực hiện về đề tài này. Vì vậy, nghiên cứu về robot hút bụi
là cần thiết tạo tiền đề chế tạo ra sản phẩm phù hợp phục vụ nhu cầu trong nước.
1.2 Một số robot hút bụi hiện nay
1.2.1 Robot Romba:
Robot Roomba của hãng iRobot là một robot hút bụi thông minh. Không
giống như các loại máy hút bụi thông thường. Roombathực hiện công việc hút bụi một
cách hoàn toàn tự động theo chương trình đã được lập sẵn. Roomba thích hợp cho các gia
đình và văn phòng có nền gỗ, thảm, đá hoa.
4
Với kích thước nhỏ gọn robot có thể di chuyển hết các phòng,những nơi mà máy
hút bụi thông thường khó vào được như gầm bàn, giường, sofa,…
Các chức năng nổi bật của Roomba là điều khiển từ xa bằng remote control tự cảm
nhận tránh vật cản, tự động sạc khi hết nguồn pin. Roomba có khả năng di chuyển linh hoạt
như di chuyển hình xoắn ốc, zigzag,…
Hình 1.1: Kết cấu của robot Romba
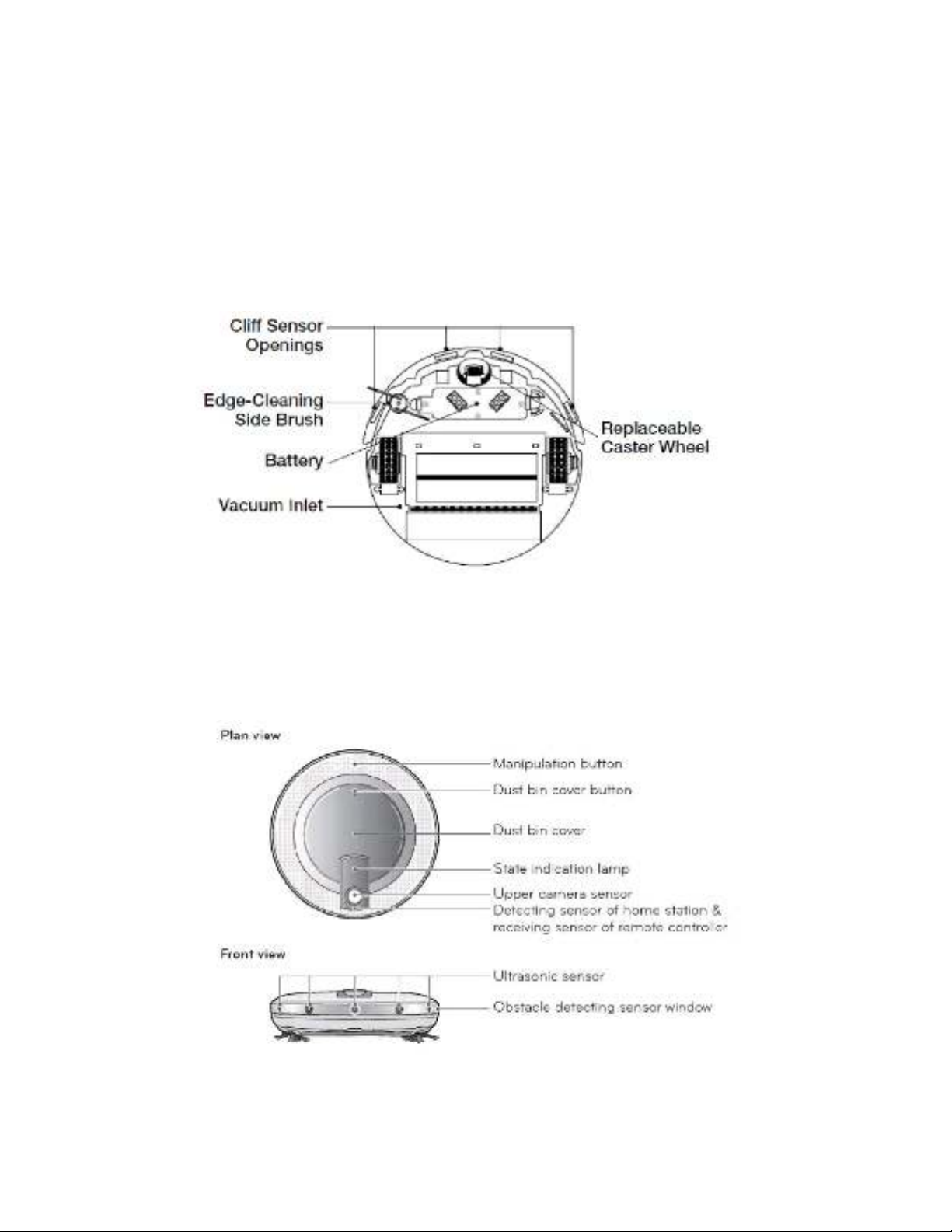
1.2.2 Robot LG Hombot
Hombot là một robot hút bụi thông minh thế hệ mớido hãng LG nghiên cứu chế tạo.
Hình 1.2: Kết cấu robot LG Hombot
5
Hệ thống cảm nhận vật cản của robot sử dụng cảm biến siêu âm, cảm này giúp cho
robot phát hiện vật cản hiệu quả, đo khoảng cách chuẩn xác. Robot tiếp xúc với vật cản từ
khoảng cách rất nhỏ với chỉ 5 mm.
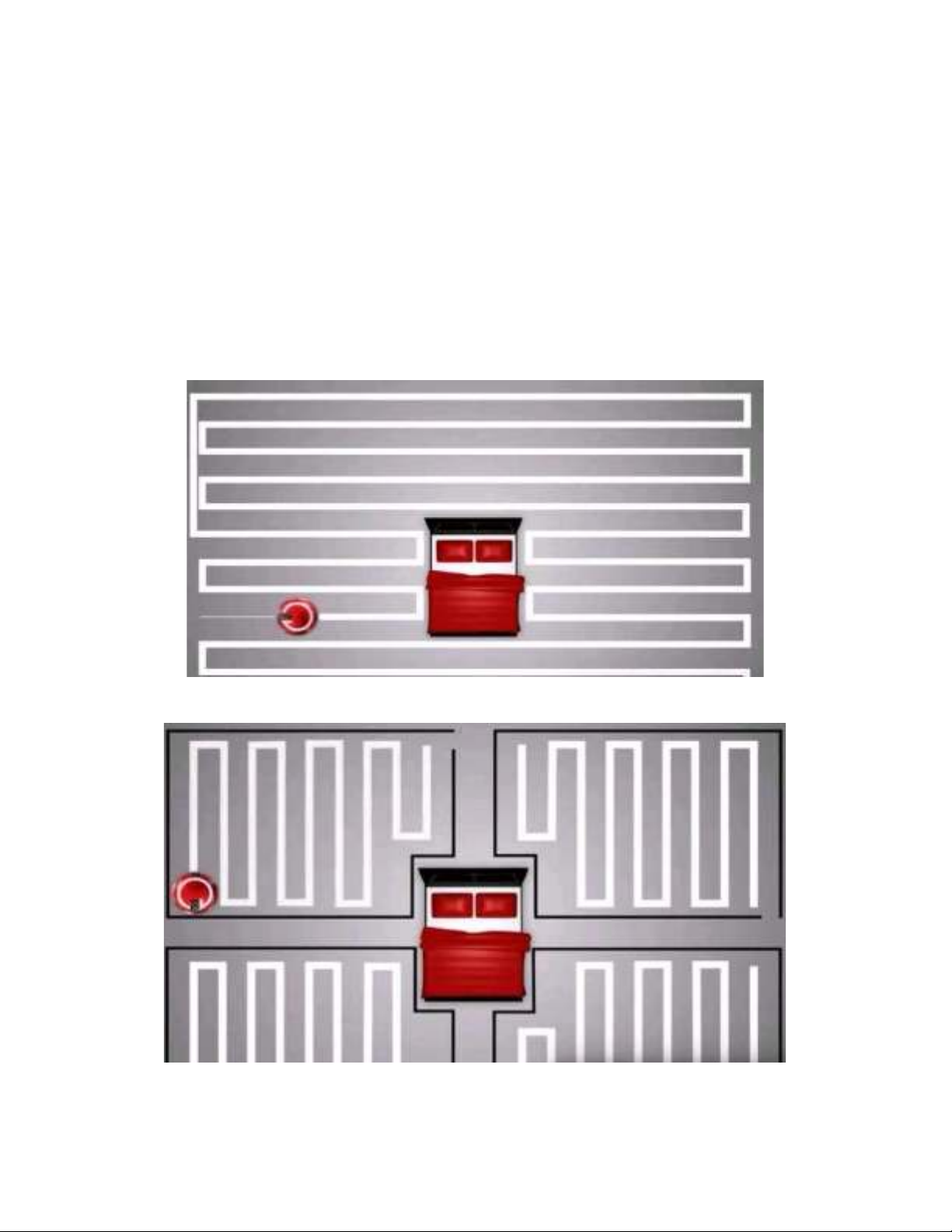
Không giống như các robot hút bụi khác, Hombot hoạtđộng hiệu quả nhờ các chế
độ di chuyển hợp lý, như hình xoáy ốc, zigzag, phân ngăn, phân ô.Trang bị camera nhận
biết không gian, từ đó đưa ra lịnh trình làm việc hiệu quả cao. Ví dụ như : những nơi mà
robot đã đi qua sẽ không lập lại, ưu tiên làm sạch ở những nơi bẩn hơn.
Hình 1.3: Robot di chuyển kiểu zích-zắc
Hình 1.4: Robot di chuyển kiểu phân ô






![Robot tự vận hành: Đề tài nghiên cứu khoa học [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240119/boghoado07/135x160/896608541.jpg)






![Thiết kế mạch điện tử: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250930/ngotien0801@gmail.com/135x160/55401759287195.jpg)