§å ¸n m«n häc TruyÒn ®éng ®iÖn
______________________________________________________________________________
Líp : C¬ ®iÖn K49 U«ng BÝ
________________________________________________________________________
Sinh viªn thùc hiÖn: Qu¸ch Tr−êng S¬n
1
ĐỒ ÁN MÔN HỌC
Đề tài
"THIẾT KẾ BỘ ĐIỀU KHIỂN
TỐC ĐỘ ĐỘNG CƠ MỘT CHIỀU
KÍCH TỪ ĐỘC LẬP”

§å ¸n m«n häc TruyÒn ®éng ®iÖn
______________________________________________________________________________
________________________________________________________________________
Sinh viªn thùc hiÖn: Qu¸ch Tr−êng S¬n
2
50
MỤC LỤC
Lời nói đầu 1
CHƯƠNG I: TÍNH TOÁN CÁC THAM SỐ CỦA ĐỘNG CƠ 2
1.1 Các tham ssố cơ bản của động cơ 2
1.2 Tính toán các tham số định mức 2
1.3 Đặc tính cơ tự nhiên của động cơ 3
CHƯƠNG II: PHƯƠNG PHÁP CẤP ĐIỆNC HO ĐỘNG CƠ 6
2.1 Cung cấp điện cho động cơ bằng máy phát riêng 6
2.2 Giải pháp dùng chỉnh lưu có điều khiển 7
CHƯƠNG III: PHƯƠNG PHÁP KHỞI ĐỘNG - HÃM - ĐIỀU CHỈNH TỐC ĐỘ 11
3.1 Khởi động động cơ kích từ độc lập 11
3.2 Hãm động cơ một chiều kích từ độc lập 14
a. Hãm tái sinh 14
b. Hãm đấu ngược 16
c. Hãm động năng 17
3.3 Điều chỉnh tốc độ động cơ 18
CHƯƠNG IV: XÂY DỰNG SƠ ĐỒ NGUYÊN LÝ HỆ ĐIỀU KHIỂN TỰ ĐỘNG, 19
CHỌN THIẾT BỊ BẢO VỆ
4.1 Thiết kế mạch lực 19
4.1.1 Giới thiệu hệ thống van động cơ
19
4.1.2 Sơ đồ mạch động lực 22
4.1.3 Tính chọn các thiết bị trong sơ đồ mạch lực 23
4.2 Thiết kế mạch điều khỉên 29
4.2.1 Sơ đồ mạch điều khiển 29
4.2.2 Nguyên lý hoạt động 30
4.2.3 Tính chọn các thiết bị bảo vệ cho mạch điều khiển 32
a. Khâu đồng pha 32
b. Khâu tạo điện áp răng cưa 33
c. Khâu so sánh 35
d. Khâu phát xung chùm 35
e. Khâu khuéch đại xung và biến áp xung 37
Líp : C¬ ®iÖn K49 U«ng BÝ

§å ¸n m«n häc TruyÒn ®éng ®iÖn
______________________________________________________________________________
________________________________________________________________________
Sinh viªn thùc hiÖn: Qu¸ch Tr−êng S¬n
3
100
f. Khâu tạo nguồn nuôi 40
4.3 Các thiết bị đo lường bảo vệ 43
4.3.1 Máy phát tốc để tạo phản hồi điện áp cho mạch vòng điên áp 43
4.3.2 Khâu hạn chế dòng 44
4.3.3 Sen sơ để đo lường dòng cho mạch vòng dòng điện 44
CHƯƠNG V: MÔ PHỎNG HỆ BẰNG PHẦN MỀM SIMULINK MATLAB 46
5.1 Sơ lược về Simulink Matlab
46
5.2 Mô hình toán của hệ 47
5.3 Mô phỏng dòng điên, mômen, tốc độ của động cơ 48
KẾT LUẬN 51
TÀI LIỆU THAM KHẢO 52
MỤC LỤC 53
Líp : C¬ ®iÖn K49 U«ng BÝ

§å ¸n m«n häc TruyÒn ®éng ®iÖn
______________________________________________________________________________
________________________________________________________________________
Sinh viªn thùc hiÖn: Qu¸ch Tr−êng S¬n
4
LỜI NÓI ĐẦU
Trong những năm gần đây nền kinh tế thế giới đã phát triển rất nhanh chóng,
trong đó có Việt Nam, nhất là từ khi nước ta chính thức gia nhập tổ chức kinh tế
WTO – một tổ chức kinh tế rất lớn mạnh của thế giới. Song song với sự phát triển
về kinh tế đó phải kể đến sự bùng nổ của khoa học công nghệ về điện tử, tin học,
các hệ thống truyền động điện tự động ngày càng hiện đại và thông minh hơn để
đáp ứng được các yêu cầu của thực tế các quá trình công nghệ.
Đứng trước những biến động và thách thức đó nhà nước ta đã có hàng loạt
các chính sách khuyến khích các tổ chức, cá nhân phát triển sáng tạo ra những thiết
bị về điện để ứng dụng vào sản xuất nhằm phát triển nền kinh tế cao hơn nữa. Ta
thấy hiện nay những thiết bị về tự động hoá của các nước phát triển trên thế giới ồ
ạt lấn chiếm thị trường Việt Nam ta. Đặc biệt ta thấy truyền động điện tự động đang
được ứng dụng rất rọng rãi trong các lĩnh vực công nghiệp nói chung và công
nghiệp mỏ nói riêng.
Với tất cả những thách thức và cơ hội đó bản thân em là một sinh viên
nghành cơ điện mỏ đang được đào tạo để trở thành một kỹ sư trong tương lai không
xa. Em đã được học một số môn học về tự động hoá đặc biệt là môn Truyền động
điện của thầy giáo – PGS.TS Thái Duy Thức giảng dạy, qua môn học và qua trải
nghiệm từ thực tế em đã nghiên cứu tìm tòi, đọc các tài liệu liên quan đến lĩnh vực
tự động hoá em đã tích luỹ được một vốn kiến thức nho nhỏ với hy vọng sẽ làm
được điều gì đó có ích để ứng dụng vào thực tế sản xuất. Sau khi kết thúc môn học
Truyền động điện và được thầy giáo giao đề tài thiết kế môn học là: “THIẾT KẾ
BỘ ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ MỘT CHIỀU KÍCH TỪ ĐỘC LẬP” em
đã thu thập tài liệu tham khảo để tính toán thiết kế theo yêu cầu nhưng không thể
tránh khỏi thiếu sót và sai lầm. Qua đây em rất mong được sự chỉ bảo, góp ý của quí
thầy giáo và bạn bè đồng nghiệp để em rút kinh nghiệm bổ xung cho đồ án được
hoàn thiện hơn.
Líp : C¬ ®iÖn K49 U«ng BÝ
§å ¸n m«n häc TruyÒn ®éng ®iÖn
______________________________________________________________________________
________________________________________________________________________
Sinh viªn thùc hiÖn: Qu¸ch Tr−êng S¬n
5
150 Em xin trân thành cảm ơn quý thầy cô!
Sinh viên
Quách Trường Sơn
CHƯƠNG I
TÍNH TOÁN CÁC THAM SỐ CỦA ĐỘNG CƠ
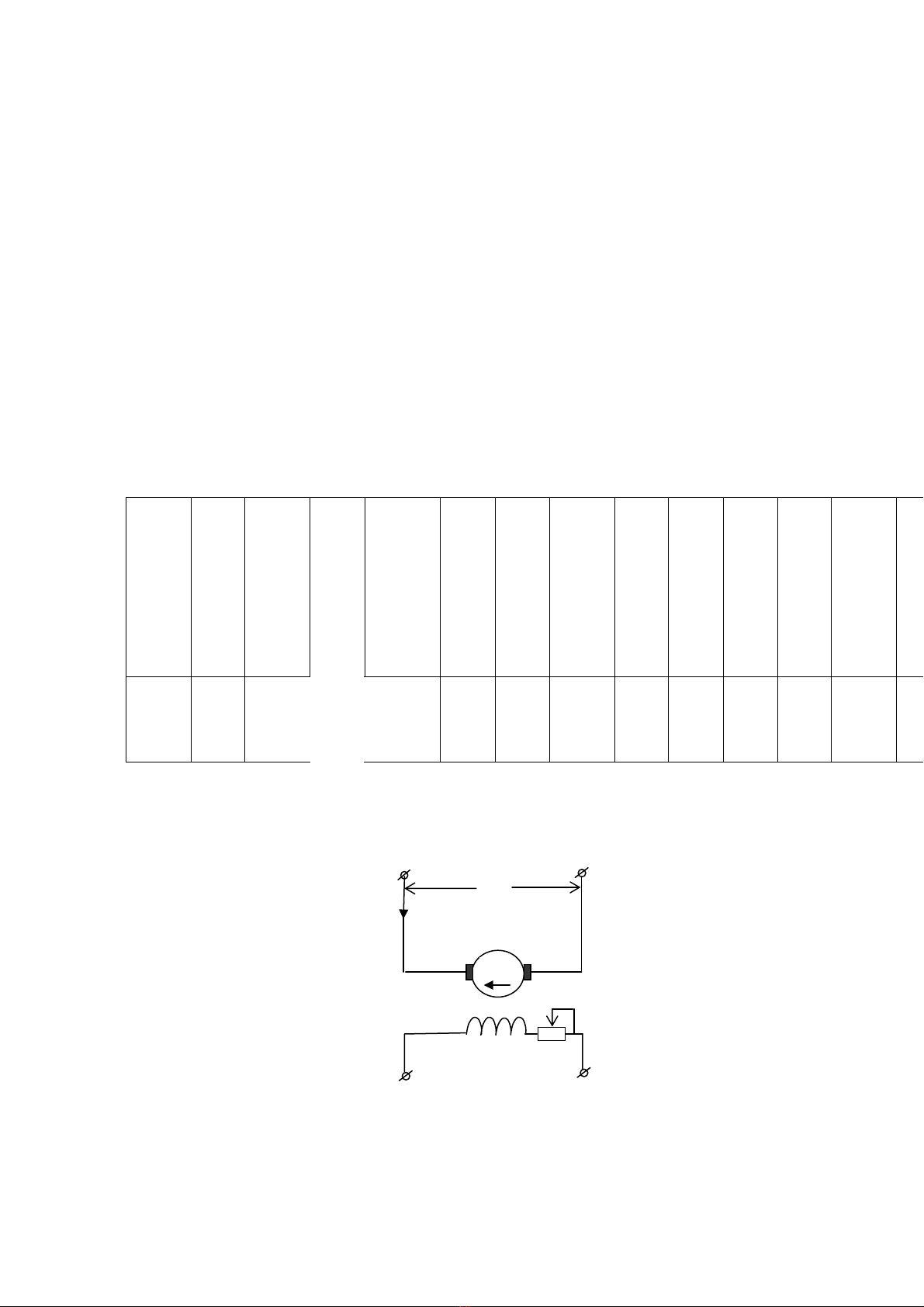
1.1 Các thông số cơ bản của động cơ
Theo nhiệm vụ thiết kế thì động cơ đã cho là loại é52 các thông số kỹ thuật
cho ở bảng 1.1 dưới đây:
Bảng1.1
I+r rKiểu P n RSố
thanh
dẫn
tác
dung
của
phần
ứng
N
Số
nhánh
song
song
của
phần
ứng 2a
Số
vòng
dây
một
cực
của
cuộn
song
song
ự
Từ
thông
hữu
ích
của
một
cực ễ,
mVb
Dòng
kích
từ
song
song
Tốc
độ
quay
cho
phép
cực
đại
vg/ph
Mô
men
quán
tính
của
phần
ứng J,
kgm
K
h
lư
ợ
củ
a
độ
n
cơ
kg
đm đm ưcp cks
KW vg/p
h
A Ù Ù
định
mức
iđm,
A
2
kcs
é52 4,5 1000 25,2 0,632 184 992 2 1650 0,91 2000 0,40
1
7,9
Sơ đồ đấu bình thường của động cơ kích từ độc lập cho ở hình 1.1. Cuộn kích
từ của động cơ được cấp điện từ một nguồn độc lập.
E
Uđm
Ukt
I
Hình
11
LỜI NÓI ĐẦU............................................................................................................ 4 U
CHƯƠNG I ...............................................................................................................5
Líp : C¬ ®iÖn K49 U«ng BÝ




![Báo cáo thực tập tốt nghiệp Công ty TNHH Cơ điện Samwa Tek: [Mô tả chi tiết hơn về nội dung báo cáo nếu có thể]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/trantiendat_ct2/135x160/96461758161119.jpg)
![Báo cáo thực tập tại Garage Car Plus [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250810/nguyenanhquoc2809@gmail.com/135x160/25661754896300.jpg)



![Đồ án tốt nghiệp: Tính toán, kiểm tra hệ thống điều hòa không khí cho tòa nhà Depot Tham Lương [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250717/vijiraiya/135x160/40421752722146.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)