thiÕt kÕ vµ chÕ t¹o ROBOCRANE
KS. Tõ DiÖp C«ng Thµnh, PGS.TS. §Æng V¨n Ngh×n
Bé m«n C¬ §iÖn Tö - Khoa C¬ KhÝ - §¹i häc B¸ch Khoa TPHCM
Email: tdcthanh@dme.hcmut.edu.vn
Tãm t¾t
Bµi b¸o giíi thiÖu tæng quan RoboCrane vµ øng dông cña c¬ cÊu song song, −u nh−îc cña c¬ cÊu,
kh¶ n¨ng lµm viÖc, thiÕt kÕ vµ nªu mét sè gi¶i ph¸p ®iÒu khiÓn RoboCrane bao gåm: Ph©n tÝch vÞ
trÝ, ph©n tÝch Jacobian, ph©n tÝch lùc tÜnh vµ ®é cøng v÷ng, ph©n tÝch ®éng häc, ph©n tÝch ®éng lùc
häc, thiÕt kÕ kÕt cÊu ch©n vµ ®−a ra mét gi¶i ph¸p ®iÒu khiÓn song song c¸c c¬ cÊu chÊp hµnh .
Abstract
The paper introduces the general of RoboCrane and the application of parallel control mechanics.
Main terms are design compositions and lodge a solution to control RoboCrane. Some main
subjects are studied: Position Analysis, Jacobian Analysis, Statics and Stiffness Analysis,
Kinematics Analysis, Dynamics Analysis, Design climb compositions and lodge a solution to
parallel control actuators.
tæng quan
CÇn cÈu ®−îc dïng rÊt nhiÒu trong lÜnh vùc s¶n xuÊt lín nh−ng kh¶ n¨ng sö dông kh«ng
®−îc réng r·i trong nh÷ng lÜnh vùc ®ßi hái sù chÝnh x¸c cao. §Ó kh¾c phôc ®iÒu ®ã, mét
lo¹i cÇn cÈu míi ®· ra ®êi, nã ®−îc ®iÒu khiÓn khèng chÕ c¶ s¸u bËc tù do b»ng m¸y tÝnh.
CÇn cÈu ®ã ®−îc gäi lµ cÇn cÈu Robot hay lµ RoboCrane.
RoboCrane ®−îc thiÕt kÕ dùa trªn ý t−ëng tay m¸y liªn kÕt song song cña Stewart Platform
sö dông c¸c d©y c¸p lµ phÇn nèi song song vµ trôc têi lµ bé phËn vËn hµnh. Sµn lµm viÖc
®−îc treo l¬ löng vµ gi÷ c¨ng bëi s¸u sîi d©y c¸p, t¶i träng lµ lùc c−ìng bøc.
Trong nh÷ng n¨m gÇn ®©y, ViÖn Tiªu ChuÈn vµ Kü ThuËt Quèc Gia Hoa Kú (NIST) ®·
nghiªn cøu rÊt nhiÒu vÒ RoboCrane v× RoboCrane lµ mét cuéc c¸ch m¹ng míi cña cÇn cÈu
tù ®éng, cã thÓ ®iÒu khiÓn vÞ trÝ, tèc ®é mét c¸ch chÝnh x¸c theo c¶ s¸u bËc tù do.
D−íi ®©y lµ mét sè h×nh ¶nh RoboCrane cña NIST ®−îc ¸p dông vµo thùc tÕ.
(a) (b)
H×nh 1: a) RoboCrane vËn chuyÓn hµng hãa
b) RoboCrane x©y cÇu
c) RoboCrane x©y dùng d©n dông vµ kinh doanh
d) RoboCrane hµn trong ®ãng tµu
2. PH¢N TÝCH VÞ TRÝ
- X¸c ®Þnh bËc tù do cña c¬ cÊu
Mét ®Çu cña mçi s¸u sîi c¸p cña RoboCrane ®−îc nèi víi tÊm di chuyÓn, khíp nèi nµy
®−îc xem nh− lµ khíp cÇu. §Çu d©y cßn l¹i nèi víi gi¸ qua c¸c puly, còng ®−îc xem nh− lµ
khíp cÇu. §é dµi cña mçi sîi d©y ®−îc thay ®æi bëi c¸c ®éng c¬. Víi ®é dµi cña mçi sîi
d©y kh¸c nhau ta cã thÓ t¹o ra vÞ trÝ vµ h−íng bÊt kú cña tÊm di chuyÓn trong kh«ng gian. ë
®©y cã tæng céng 14 kh©u (6 sîi d©y, 6 puly, gi¸ vµ tÊm di chuyÓn), 18 khíp, 6 bËc tù do
thõa.
Sè bËc tù do cña c¬ cÊu: F = λ(n-j-1) + Σfi – fp (1)
Víi:
λ : lµ bËc tù do cña kh©u bÊt kú trong kh«ng gian (λ=6)
n : lµ tæng sè kh©u trong c¬ cÊu
j : lµ tæng sè khíp trong c¬ cÊu
fi : lµ tæng sè bËc tù do cña khíp trong c¬ cÊu
fp : lµ tæng sè bËc tù do thõa cña c¬ cÊu
VËy F = 6(14 – 18 - 1) + (12x3 + 6x1) – 6 = 6
(c) (d)
Nh− vËy bËc tù do cña RoboCrane lµ 6, ®iÒu ®ã cã nghÜa lµ nã cã thÓ thùc hiÖn c¸c chuyÓn
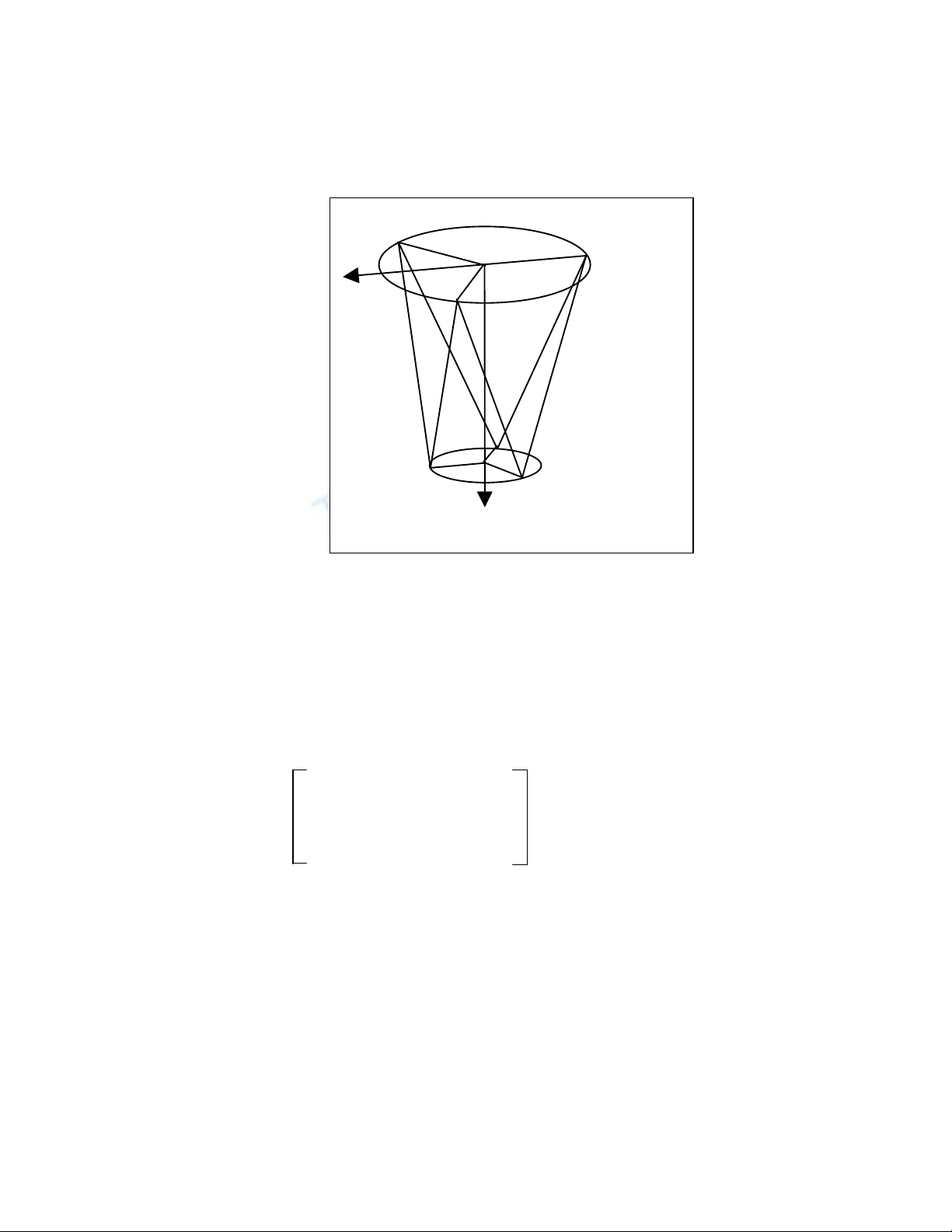
®éng tÞnh tiÕn theo ph−¬ng x, y, z, xoay, gËp, l¾c (quay quanh trôc x, y,z). Tuy nhiªn trong
ph¹m vi cña bµi b¸o th× RoboCrane ®−îc x©y dùng theo yªu cÇu tÊm di chuyÓn phÝa d−íi
lu«n lu«n chuyÓn ®éng trong mÆt ph¼ng song song víi mÆt ph¼ng Oxy. Tõ yªu cÇu ®ã ta
x¸c ®Þnh m« h×nh to¸n häc cña RoboCrane (h×nh 2).
H×nh 2: S¬ ®å nguyªn lý Robocrane
- Ma trËn xoay cña RoboCrane
Víi m« h×nh vµ yªu cÇu lµm viÖc cña RoboCrane, ta cã ®−îc ma trËn xoay chuyÓn ®æi täa
®é gi÷a tÊm di chuyÓn vµ gi¸. Ma trËn xoay cã ®−îc tõ viÖc xoay quanh trôc Oz mét gãc υ.
Khi ®ã
ARB = cosθ -sinθ 0
sinθ cosθ 0 (2)
0 0 1
3. BµI TO¸N §éNG HäC NG¦îC
§èi víi bµi to¸n ®éng häc ng−îc th× ®é dÞch chuyÓn ∆, ma trËn ARB vµ vÞ trÝ ban ®Çu po ®·
biÕt. Ta ph¶i t×m chiÒu dµi c¸c ®o¹n d©y c¸p t¹i ®iÓm ph©n tÝch. Tõ m« h×nh cña RoboCrane
ta x¸c ®Þnh täa ®é c¸c ch©n t¹i vÞ trÝ lµm viÖc nh− sau:
A1 A2
A3 A4
A5 A6
a
B6 B1
B2 B3
B4 B5
b
X
Z
O
4. Bµi to¸n ®éng häc thuËn
§èi víi bµi to¸n ®éng häc thuËn, chiÒu dµi c¸c sîi d©y c¸p di ®· biÕt, ta ph¶i x¸c ®Þnh ®−îc
vÞ trÝ tÊm di chuyÓn øng víi chiÒu dµi c¸c d©y di (chÝnh lµ ®é dÞch chuyÓn ∆ vµ ma trËn
xoay ARB).
Chóng ta còng cã thÓ nhËn ®−îc vÞ trÝ cña mçi ch©n nhê vµo vÞ trÝ cña tÊm di chuyÓn. Tõ
m« h×nh RoboCrane ta cã ph−¬ng tr×nh vßng kÝn cña ch©n i nh− sau:
ai + disi = p + bI (3)
ë ®©y ai = [aix, aiy, 0]T lµ vector vÞ trÝ cña Ai trong hÖ täa ®é cè ®Þnh A, Bbi = [bix, biy, 0]T lµ
vector vÞ trÝ cña Bi trong hÖ täa ®é di chuyÓn B, bi biÓu thÞ vector Bbi trong hÖ täa ®é cè ®Þnh
A (bi = ARB
Bbi) si lµ vector ®¬n vÞ h−íng tõ Ai ®Õn Bi vµ di lµ ®é dµi ch©n i. Ph−¬ng tr×nh
vßng kÝn ch©n i viÕt l¹i lµ
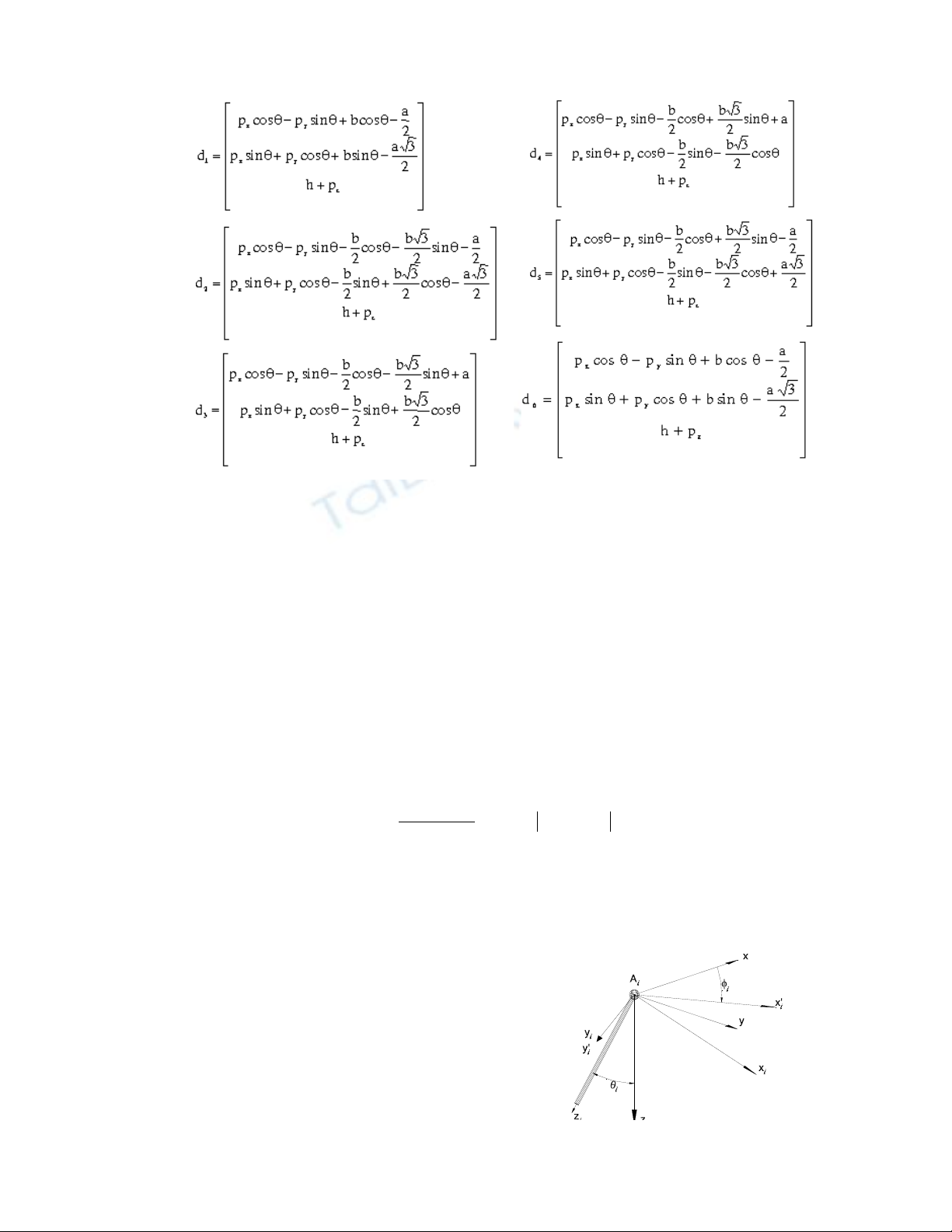
(4)
H−íng cña ch©n i cã thÓ ®−îc biÓu diÔn nhê vµo hai gãc Euler lµ quay quanh trôc zi mét
gãc φi, tiÕp ®ã quay quanh trôc yi mét gãc υi nh− trong h×nh d−íi. Do ®ã ma trËn xoay cña
ch©n i cã thÓ viÕt lµ ARi = Rzφi.Ryθi (5)
θθ−
θφφθφ
θφφ−θφ
=
θθ−
θθ
⋅
φφ
φ−φ
=
ii
iiiii
iiiii
ii
ii
ii
ii
cos0sin
sinsincoscossin
sincossincoscos
cos0sin
010
sin0cos
100
0cossin
0sincos
i
ii
id
abp
s
−
+
=iii abpd
−
−
=
Vector ®¬n vÞ isi trong hÖ täa ®é ch©n i ®−îc cho bëi isi = [0, 0, 1]T
Täa ®é si trong hÖ täa ®é cè ®Þnh ®−îc tÝnh si = ARi isi (6)
Gi¶i ph−¬ng tr×nh trªn cho ta kÕt qu¶ c¸c gãc υi, φi nh− sau
(7)
Tõ ®ã c¸c gãc Euler cña ch©n thø i ®· ®−îc x¸c ®Þnh.
5. PH¢NTÝCH JACOBIAN Vµ §é CøNG V÷NG
Gi¶ sö r»ng sù thay ®æi cña sîi c¸p chñ ®éng ®−îc biÓu diÔn bëi vector q vµ vÞ trÝ cña tÊm
di chuyÓn ®−îc biÓu diÔn bëi vector x. Khi ®ã c¸c rµng buéc ®éng häc cã thÓ ®−îc viÕt
d−íi d¹ng tæng qu¸t sau:f (x, q) = 0
ë ®©y f lµ mét hµm Èn cña q vµ x, vµ 0 lµ vector 0
§¹o hµm ph−¬ng tr×nh theo thêi gian, ta cã quan hÖ gi÷a gi¸ trÞ vµo lµ tèc ®é khíp vµ gi¸ trÞ
ra lµ vËn tèc t¸c ®éng ®Çu cuèi nh− sau:
ë ®©y (8)
(9)
PhÐp lÊy ®¹o hµm trªn dÉn ®Õn hai ma trËn Jacobian ®éc lËp.
Nhãm c¸c ma trËn Jacobian l¹i, cã thÓ viÕt nh− sau . ë ®©y J = Jq-1.Jx
θ
θφ
θφ
=
i
ii
ii
i
cos
sinsin
sincos
s
i
ix
i
i
iy
i
2
iy
2
ixi
izi
sin
s
cos
sin
s
sin
)0(sssin
scos
θ
=φ
θ
=φ
π≤θ≤+=θ
=θ
.
q
q
Jx
x
J.=
q
f
q
J
x
f
x
J
∂
∂
=
∂
∂
=
−−
−−+−−−
−−+−
−+−
−−−
−−−−
=
ab32bh02ha3a2b
ab3bhbh32ha)b(3ab
ab3bhbh32hb32ab
ab3bhbh32hb32ab
ab3bhbh32ha)(b3ab
ab32bh02ha3a2b
2d
1
J
.
xJ
.
q=




![Chương trình Test Aero-Acoustic: Tổng hợp [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2012/20120202/luly_meo1/135x160/aero_acoustic_test_programs_split_6_4917.jpg)









![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)






![Giáo trình Hàn TIG cơ bản (Ngành Hàn - CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/97451778728709.jpg)
