1
CÂU HỎI
TỰ ĐỘNG HOÁ QUÁ TRÌNH SẢN XUẤT.
Câu1.
Khi thi thiết kế hệ thống tự động hoá cần qua tâm đến vấn đề gì? Cho
biết tổng quan về hệ thống tự động hoá quá trình công nghệ, chức năng của
hệ.
Câu 2.
Thiết bị kỹ thuật trong hệ thống tự động hoá quá trình công nghệ nhằm
mục đích gì? Hãy cho biết tổng quan về hệ thiết bị nói chung.
Câu 3.
Đảm bảo toán học cho hệ thống tự động hoá quá trình công nghệ nhằm
mục đích gì? Hãy xây dựng bài toán tối ưu.
Câu 4.
Khi nào cần nhận dạng đánh giá thông số của hệ được điều khiển? Hãy
cho biết 1 phương pháp nhận dạng đánh giá thông số mà anh chị biết.
Câu 5.
Hãy trình bày luật điều khiển PID, cánh chọn thông số nào đó mà anh
chị biết.
Bài tập tiểu luận số 3.
Cho một hệ thống động cơ mô tả toán học dạng:
221
.
2
12
.
1
u2.xxx
uxx
+−−=
+=
Với x1(0)=10
x
2(0)=0.
Tìm luật điều khiển để toàn hệ đạt tiêu chuẩn tối ưu cực tiểu hàm:
).dtu0,1.0,1.ux(x
2
1
J2
2
1
0
2
1
2
2
2
1
∫+++=
MỞ ĐẦU
Ngày nay nhắc đến tự động hoá quá trình công nghệ không còn là
một khái niệm mơ hồ nữa mà nó đã được ứng dụng rộng dãi trên thế giới
và trong mọi lĩnh vực. Trong mấy thậm kỷ gần đây với sự phát triển mạnh
mẽ của khoa học và sự bùng nổ thông tin, sự phát triển mạnh mẽ máy tính
2
điện tử và công nghệ điện tử, vi điện tử, bán dẫn và các dụng cụ chính xác
khác… cộng với sự phát hiện nhiều quy luật điều khiển mới, thúc đẩy quá
trình tự động hoá công nghệ cũng phát triển mạnh mẽ, sâu rộng và ngày
càng hoàn thiện hơn.
Hoà chung nền khoa học của thế giới, nền sản xuất nước ta cũng dần
đi vào phát triển lĩnh vực này. Với đặc điểm là một nước đang phát triển,
nền khoa học kỹ thuật còn non kém, trong khi đó sự phát triển khoa học
như vũ bão đã đẩy nước ta cũng như các nước đang phát triển khác rơi vào
hoàn cảnh trở thành nơi chứa đựng các dây truyền lạc hậu từ các nước phát
triển hơn, hoặc bị khống chế về công nghệ. Trước tình hình như vậy đòi
hỏi cần có một đội ngũ kỹ sư phải hiểu biết về lĩnh vực tự động hoá, am
hiểu về công nghệ và có tính năng động, tự chủ để đáp ứng yêu cầu của xã
hội. Chính vì vậy môn học “ Tự động hoá qúa trình công nghệ được đưa
vào giảng dạy ở bộ môn Tự động hoá, giúp cho sinh viên có cái nhìn tổng
quan về một hệ thống quá trình công nghệ tự động.
Câu 1.
Khi thiết kế hệ thống tự động hoá cần quan tâm đến vấn đề
gì?
Tự động hoá quá trình công nghệ là hệ thống điều khiển tự động sản
xuất trong các xí nghiệp, sử dụng các thiết bị tự động để xử lý thông tin,
xử dụng các phương tiện toán học để giải quyết các nhiệm vụ điều khiển
hoạt động kinh tế , sản xuất của xí nghiệp. Các hệ thống điều khiển này
được hiểu là hệ thống điều khiển các quá trình trên cơ sở sử dụng kĩ thuật
tính, kỹ thuật tự động, kỹ thuật điều khiển, điều chỉnh để điều khiển công
nghệ theo một tiêu chuẩn xác định đặt trước mà trong đó con người mong
muốn và quyết định quá trình.
3
Chính vì vậy khi thiết kế hệ thống tự động hoá quá trình sản xuất
chúng ta cần phải quan tâm đến những vấn đề toán học, thông tin nhân lực
và kỹ thuật.
Thứ nhất, đảm bảo toán học của hệ thống tự động hoá quá trình công
nhgệ ( HT-TĐH-QTCN ) Là xác định phưong pháp hiện thực hoá việc điều
khiển QTCN theo các tiêu chuẩn xác định và thực hiện hoá chương trình
của chúng . Để bảo đảm được toán học , chúng ta phải bảo đảm được hai
phần có quan hệ mật thiết với nhau : Bảo đảm algoritm và bảo đảm chương
trình . bảo đảm algoritm của HT-TĐH-QTCN tạo ra nội dung chính của
các vấn đề thiết kế trên cơ sở đó soạn thảo soạn thảo thiết ké chi tiét của
các hệ thống còn riêng rẽ . Bảo đảm này có ý nghĩa quan rtọng , xác định
chất lượng của hệ thống . Vì thế khi thiết kế hệ thống , hiện thực việc bảo
đảm algoritm phải trên cơ sớ lý thuyết điều khiển tự động , điều khiển
lôgic , điều khiển hệ thao tác , phân tích thao tác và hệ thống . Bảo đảm
chương trình tạo ra phần có ý nghĩa bao hàm những thiết kế cụ thể của các
hệ thống con
Thứ hai , bảo đảm thông tin HT-TĐH-QTCN là xác định các
phương pháp cụ thể để biểu diễn các thông tin về trạng thái của đối tượng
được điều khiển . Các thông tin về trạng thái của của đối tượng được biểu
diễn ở dạng số cho máy tính hay dạnd số liệu tính cần thiết cho người vận
hành trong quá trình điều khiển hệ thống . Hiểu theo nghĩa rộng , đảm bảo
thông tin là hệ thống phản ánh quá trính sản xuất , là hệ thống các mô hình
thông tin dùng để mô tả một cách hình thức quá trình sán xuất . Hiểu theo
nghĩa hẹp , đảm bảo thông tin là hệ thống phân loại mã hoá thông tin kinh
tế , kỹ thuật , công nghệ và hiện thực hệ thống thông tin . Để đảm bảo
được thông tin , ta phải đảm bảo đựơc đủ thông tin để thực hiện các mục
tiêu yêu cầu , các tín hiệu và mã phải theo tiêu chuẩn , phải đơn giản nhất
,thích hợp với nơi sản xuất , ít bị nhiềm và phỉa có khả năng trao đổi thông
tin giữa các thiết bị kỹ thuật .
Thứ ba , bảo đảm tổ chức nhân lực là đại diện cho các vấn đề : xác
định nội dung , nguyên tắc hoạt động của người thao tác khi điều khiển
QTCN ở chế độ bình thường và chế độ sự cố ; Điều phối nhân lực để tạo ra
quan hệ giữa các nhà công nghệ và người thao tác sao cho bảo đảm điều
khiển quá trình theo chương trình thống nhất .
Cuối cùng ,bảo đảm kỹ thuật HT-TĐH-QTCN là toàn bộ thiết bị kỹ
thuật của hệ thống hay còn goi là “phần cứng” của hệ . Bảo đảm này được
hiện thực hoá từ kỹ thuật tự động , kỹ thuật tính điều chỉnh . Các thiết bị kỹ
thuật phải thực hiện được những chức năng của hệ thống cần thiét kế .
Cho biết tổng quan về hệ thống tự động hoá quá trình công
nghệ, chức năng của hệ.
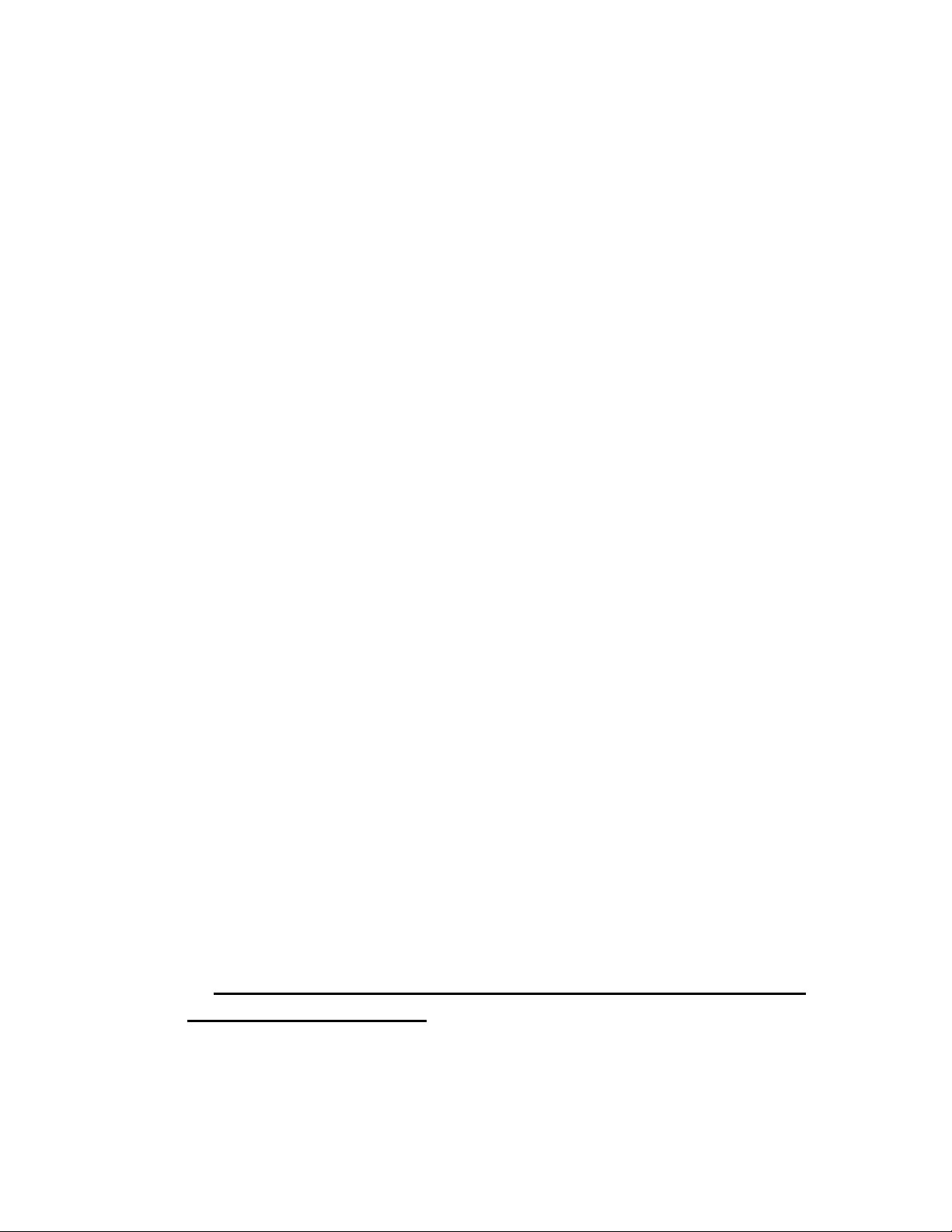
Sơ đồ tổng quan về hệ thống tự động hoá quá trình công nghệ công
nghệ
4
Tuỳ thuộc công nghệ yêu cầu, ứng với mỗi quá trình công nghệ người
ta xây dựng hệ điều khiển tương ứng. Việc xây dựng tuỳ thuộc vào chỉ tiêu
chất lượng đặt ra.
Tuy nhiên có thể nói rằng tất cả các hệ đều phải trên cơ sở nền tảng:
Có con người phục vụ, thao tác điều phối giám sát.
Đảm bảo được vấn đề thông tin, tổ chức, kỹ thuật, chương trình toán
học.
Trong quá trình hoạt động của hệ, các khâu có quan hệ mật thiết với
nhau. Con người cùng với thiết bị tính làm nhiệm vụ đảm bảo cho hệ thống
làm việc theo yêu cầu công nghệ đặt ra.
Đảm bảo toán học, chương trình sẽ xác định đúng các luật điều khiển
chiến lược điều khiển cho hệ thống, thông qua các thiết bị kỹ thuật để thực
hiện hoá, đảm bảo hệ thống làm việc theo yêu cầu công nghệ mong muốn.
Chức năng của hệ thống tự động hoá quá trình công nghệ
Tuỳ thuộc vào đặc điểm công nghệ mà chức năng của hệ thống có
những đặc điểm đặc trưng khác nhau. Tuy nhiên các hệ thống tự động hoá
quá trình sản xuất ngày nay đều cố gắng hoàn thiện các chức năng sau:
Chức năng thông tin
Chức năng trao đổi trực tiếp
Chức năng điều khiển
Chức năng bổ trợ
1.Chức năng thông tin.
Hệ thống tự động hoá quá trình công nghệ phải đảm bảo được vấn đề
thông tin cho toàn hệ. Các hệ con của hệ này cần phải giải quyết:
+Chọn, soạn thảo và thu nhận thông tin. Ví dụ : đo lường các thông số
của quá trình, các tín hiệu về trạng thái của trạng thái hệ thống…
+Kiểm tra, ghi lại các thông số của quá trình, trạng thái của các thiết bị
so với ban đầu, yêu cầu tín hiệu hoá các giá trị vượt giá trị giới hạn.
+Phân tích được hoạt động của hệ thống, ghi nhận trạng thái khi không
an toàn.
+Ghi lại quá trình công nghệ theo các thông số công nghệ yêu cầu. Ví
dụ đồ thị, hình ảnh.
Tổ chức hoá Vận hành điều
phối
Thông tin
vào
Soạn thảo, xử lý
thông tin
Thông tin ra
Đảm bảo kỹ
thuật-(máy tính)
Đảm bảo
chương trình
to
á
nh
ọ
c
5
Chức năng thông tin là rất quan trọng, đây chính là yếu tố thiết yếu của
một hệ thống tự động. Bởi vì để điều khiển một hệ thống đòi hỏi phải nắm
vững được các thông số, trạng thái của hệ. Chức năng thông tin cung cấp
những thông số, quá trình hoạt động của hệ thống để giúp cho quá trình
điều khiển, giám sát hệ thống. Chính vì vậy mà trong hệ thống tự động
hoá, ngày càng đòi hỏi phải hoàn thiện chức năng thông tin. Chức năng
thông tin hoàn thiện thì hệ càng có tính điều khiển thời gian thực và có khả
năng giám sát cao.
2.Chức năng trao đổi trực tiếp:
Các hệ thống con dùng trao đổi trực tiếp có nhiệm vụ xử lý logic các
thông tin về hệ thống trong trạng thái sự cố và hoạt động bình thường.
Các nhiệm vụ cơ bản:
+Trao đổi diễn biến công nghệ, trạng thái thiết bị công nghệ.
+Kiểm tra các thông tin cho kết quả.
+Thông báo trước về tình trạng sự cố, khả năng giảm chất lượng sản
phẩm.
3.Chức năng điều khiển.
Chức năng này nhằm đưa công nghệ đang thực hiện đạt được các mục
tiêu hiệu quả nhất. Các hệ con phải đảm bảo:
+Điều chỉnh, bảo vệ, điều khiển logic….(theo công nghệ yêu cầu) các
thông số của hệ.
+ổn định các thông số của công nghệ.
+Đảm bảo chống nhiễu lên hệ thống.
+Dừng hoặc khởi động liên động khi thay đổi ca sản xuất.
+Điều khiển các hoạt động bổ trợ, năng lượng….
+Kiểm tra hoạt động của các luật điều khiển.
+Cùng với người vận hành, phải đảm bảo điều khiển hệ trong các chế
độ của hệ thống.
+Đảm bảo kế hoạch tối ưu cho quá trình sản xuất.
4.Chức năng bổ trợ.
-Bảo vệ sức khoẻ của con người, người vận hành.
-Bảo vệ an toàn chung, kỷ luật lao động.
-Bảo vệ chống sự cố lên người vận hành, môi trường.
Mức độ của các chức năng trên phụ thuộc vào sự phát triển của kỹ thuật
và mức độ đầu tư tự động hoá, yêu cầu chất lượng sản phẩm.
Câu 2.
Mục đích của thiết bị kỹ thuật trong hệ thống tự động hoá quá trình
công nghệ.
Thiết bị kỹ thuật của hệ thống tự động hoá quá trình công nghệ nhằm
đảm bảo vấn đề kỹ thuật cho hệ, ở đây được xem là phần cứng của hệ. Như
vậy thiết bị kỹ thuật được lựa chọn sao cho đảm bảo được yêu cầu kỹ thuật
![Mô hình rửa xe tự động PLC: Đồ án tốt nghiệp [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260408/bachduong_011/135x160/7671775639278.jpg)
![Thiết kế hệ thống điều khiển xả liệu: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260408/linhquang123hp@gmail.com/135x160/98981775612514.jpg)


![Đồ án môn học: Tính toán thiết kế nhà máy nhiệt điện [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250922/thieuquan520@gmail.com/135x160/35141758512299.jpg)



![Hệ thống tưới cây trồng tự động: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250730/vijiraiya/135x160/22461753862213.jpg)

















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)