
Chương 2
PHÂN TÍCH ĐỘNG HỌC
CƠ CẤU PHẲNG
GV: TS. Nguyễn Chí Hưng
BM: Cơ sở thiết kế máy và robot
Email: hungnc-sme@mail.hut.edu.vn
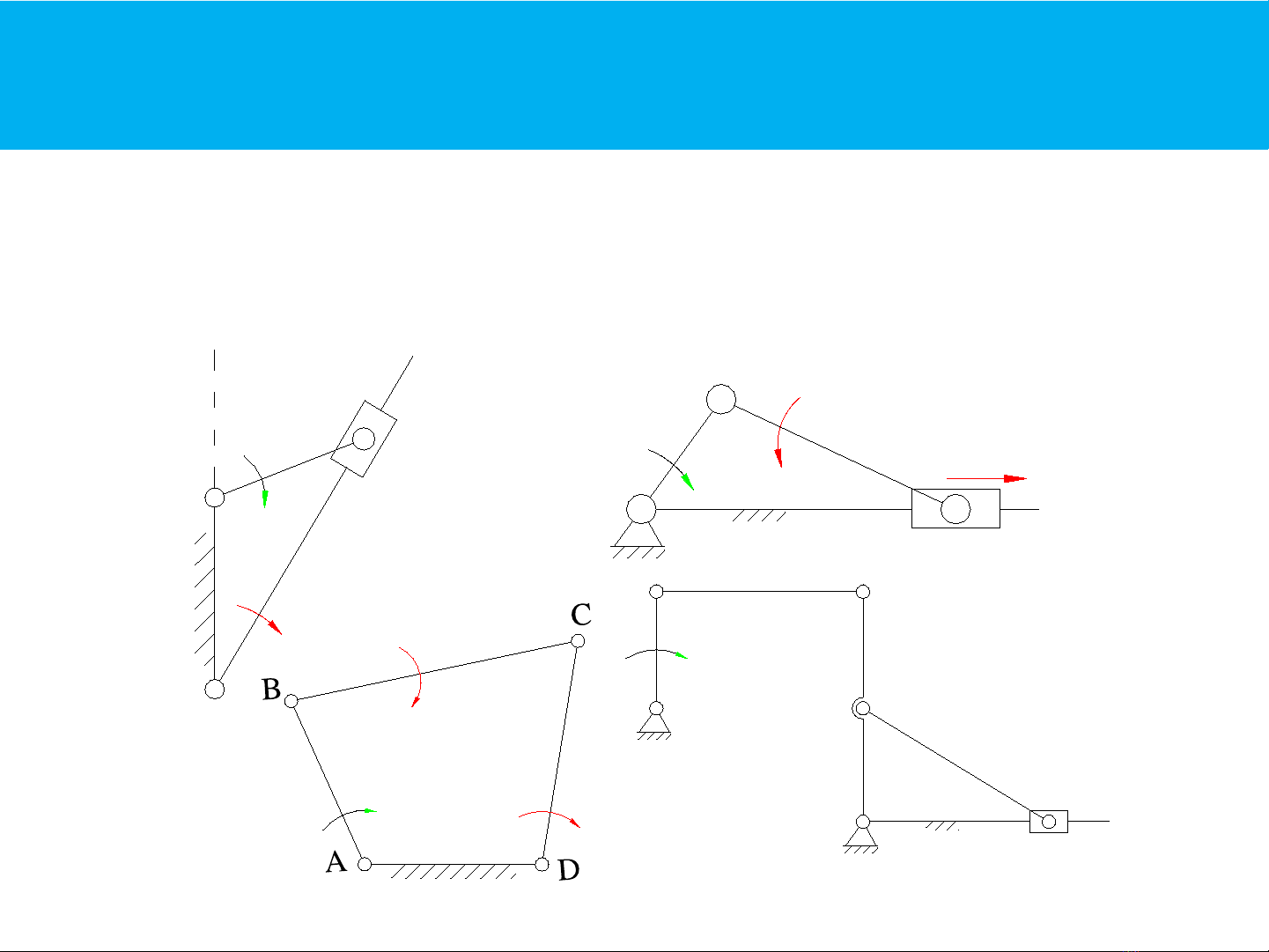
Chương 2 PHÂN TÍCH ĐỘNG HỌC CƠ CẤU PHẲNG
Mục đích
Xác định các quan hệ hình học và chuyển động của
các điểm và các khâu trên cơ cấu
CC
Culit
CC Tay quay
con trượt
1
2
3
4
C
B
A
4
3
2
1
CC Bốn khâu bản
lề
AB
C
1
2
3
4
CC hỗn hợp bốn khâu bản lề -
tay quay con trượt
A
BC
D
E
F
1
2
3
4
5
Chương 2 PHÂN TÍCH ĐỘNG HỌC CƠ CẤU PHẲNG
Giả thiết
•Cho lược đồ cơ cấu với kích thước các khâu và quan hệ hình
học giữa các khớp.
•Khâu dẫn và quy luật chuyển động của khâu dẫn (vận tốc và gia
tốc của khâu dẫn).
Để đơn giản, sau này ta xét các cơ cấu có một bậc tự do, khâu dẫn là
tay quay chuyển động đều.
Kết luận
•Xác định các thông số động học (vị trí, vận tốc, gia tốc) của các
khâu.
•Xác định đặc điểm hình-động học của cơ cấu để xác định phạm
vi sử dụng hợp lý của từng cơ cấu, rút ra cách tổng hợp hình động
học
Chương 2 PHÂN TÍCH ĐỘNG HỌC CƠ CẤU PHẲNG

Chương 2 PHÂN TÍCH ĐỘNG HỌC CƠ CẤU PHẲNG
Phương pháp
•Phương pháp đồ thị động học.
•Phương pháp họa đồ véc tơ.
•Phương pháp giải tích.
![Đề cương bài giảng Nguyên lý động cơ [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/kimphuong1001/135x160/75891752564030.jpg)




![Bài giảng Nguyên lý máy: Chương 5 - Đại học Xây dựng Hà Nội [FULL]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250423/echdada123/135x160/2892319_5577.jpg)

![Bài giảng Ứng dụng tin học trong Kỹ thuật phương tiện thủy [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251216/anhquangvu03@gmail.com/135x160/12021765937860.jpg)



![Bài tập tối ưu trong gia công cắt gọt [kèm lời giải chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251129/dinhd8055/135x160/26351764558606.jpg)








