Đại Học Giao Thông Vận Tải Tp.HCM
Đại Học Giao Thông Vận Tải Tp.HCM
Giảng viên:
Giảng viên: TS.
TS. NGUYỄN HỮU CHÂN THÀNH
NGUYỄN HỮU CHÂN THÀNH
Chương 4: Các chức năng họ 8051
Chương 4: Các chức năng họ 8051
Khoa Điện – Điện Tử Viễn Thông
Khoa Điện – Điện Tử Viễn Thông
Học phần: Vi Xử Lý
Học phần: Vi Xử Lý

Chương 4 bao gồm 3 nội dung:
1. Timer.
2. Port nối tiếp.
3. Interrupt.
I. Timer
4
1. Giới thiệu
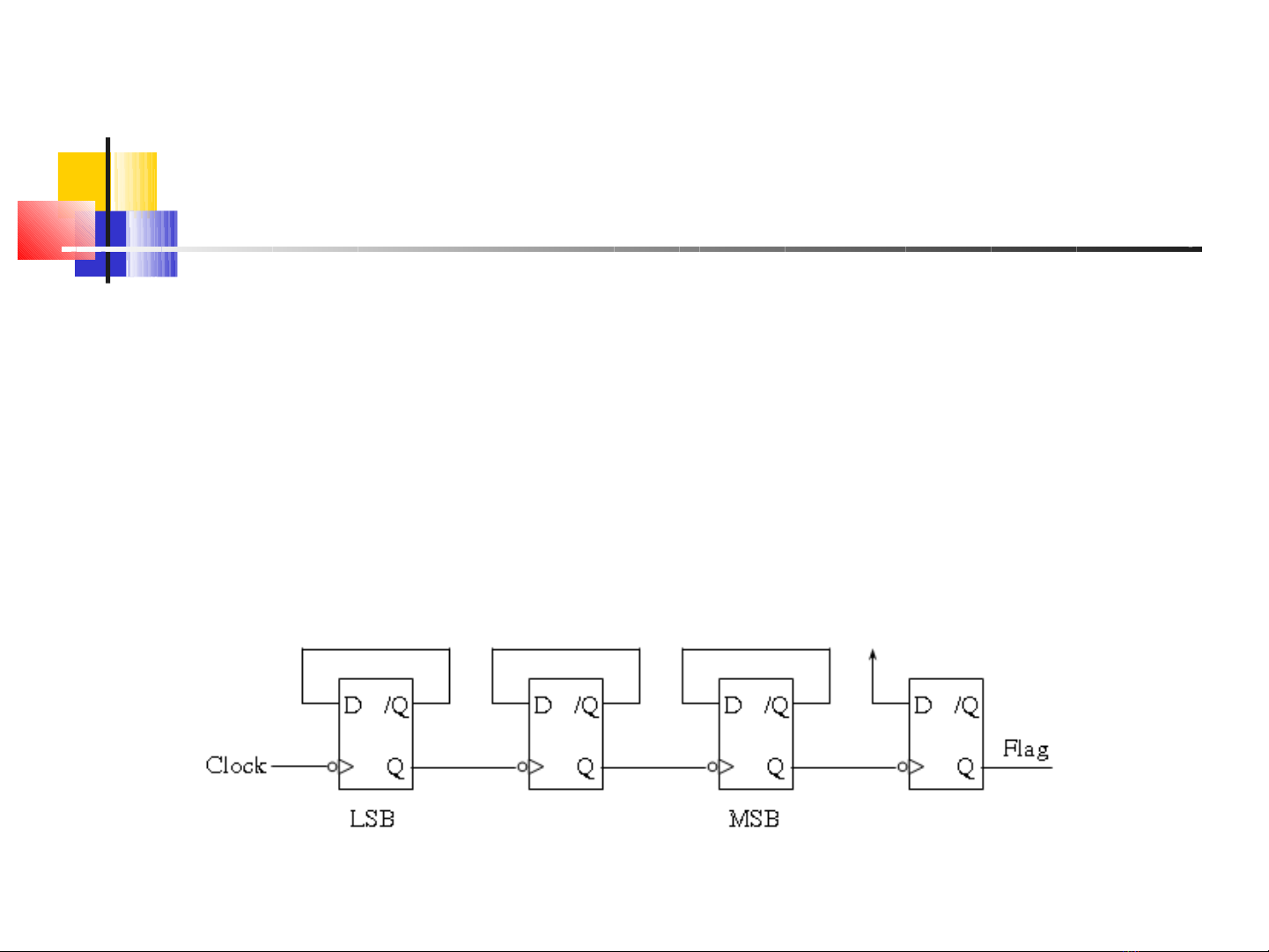
-Mô)t bô) đi)nh thơ.i (timer) la. mô)t chuô6i ca7c Flip Flop (FF) vơ7i mô6i FF
la. mô)t ma)ch chia 2. Chuô6i na.y nhâ)n mô)t ti7n hiê)u ngo6 va.o la.m xung
clock ki7ch cho tâ.ng đâ.u tiên, ngo6 ra cu?a tâ.ng đâ.u la)i trơ? tha.nh nguô.n
xung clock cho tâ.ng kê7 tiê7p. Ngo6 ra cu?a tâ.ng cuô7i cu.ng la.m xung
clock cho mô)t FF ba7o tra.n timer hay co.n go)i la. cơ. tra.n (overflow flag).
Cơ. tra.n na.y se6 đươ)c kiê?m tra bơ?i phâ.n mê.m hay ta)o ra mô)t ngă7t
(interrupt). Hi.nh dưới minh ho)a mô)t timer đơn gia?n 3-bit.
- Gia7 tri) nhi) phân trong ca7c FF cu?a timer đươ)c du.ng đê? ti7nh sô7 xung
clock (sô7 chu ki.) cu?a ti7n hiê)u ngo6 va.o tư. khi timer bă7t đâ.u đê7m.
5
1. Giới thiệu
- 8051/8031 co7 2 timer 16 bit:
+ Timer 0: sô7 đê7m chư7a trong thanh ghi TH0 (byte
cao) va. TL0 (byte thâ7p)
+ Timer 1: sô7 đê7m chư7a trong thanh ghi TH1 (byte
cao) va. TL1 (byte thâ7p)
Ngoa.i ra, ca7c chip 8032/8052 co.n co7 thêm timer 2.
- Ca7c timer chi? đê7m lên (0000H ÷ FFFFH). Khi sô7 đê7m tra.n
tư. FFFFH xuô7ng 0000H, cơ. tra.n se6 đươ)c đă)t lên 1.










![Bài giảng Nhập môn Kỹ thuật điện [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251208/nguyendoangiabao365@gmail.com/135x160/60591765176011.jpg)
![Bài giảng Cảm biến và ứng dụng: Chương 1 - Các khái niệm và đặc trưng cơ bản [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251204/kimphuong1001/135x160/51101764832169.jpg)