Số hiệu: BM1/QT-PĐBCL-RĐTV 1
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
KHOA CƠ KHÍ CHẾ TẠO MÁY
BỘ MÔN CƠ ĐIỆN TỬ
-------------------------
ĐỀ THI CUỐI KỲ HỌC KỲ 2, NĂM HỌC 17-18
Môn: HỆ THỐNG TRUYỀN ĐỘNG SERVO
Mã môn học: SERV424029
Đề số: 01; Đề thi có 2 trang.
Thời gian: 60 phút.
Được phép sử dụng tài liệu
Bài 1: (4đ)
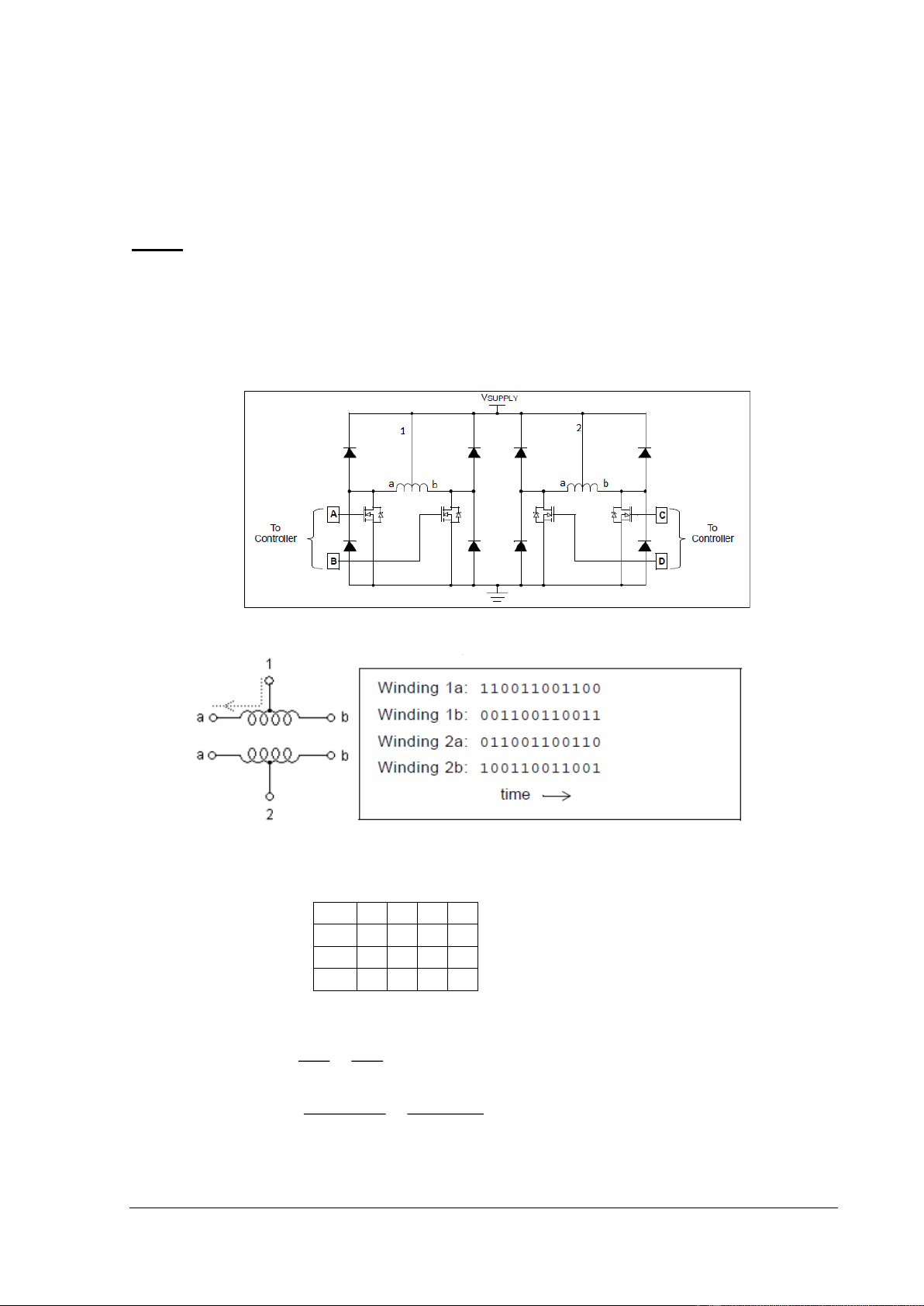
a. Vẽ sơ đồ khối mạch điều khiển động cơ bước đơn cực (unipolar)? Viết lưu đồ
giải thuật điều khiển động cơ trên ở chế độ “2 phase ON” với vận tốc 100
(RPM). Biết hàm delay(t), t: thời gian delay (us: micro second).
Sơ đồ khối mạch điều khiển (0.5)
Trình tự kích 2 phase ON của động cơ (0.25)
Giả sử A, B, C, D kết nối với 4 ngõ ra của một vi điều khiển bất kỳ, dựa trên trình tự
kích trên ta rút ra được mức logic điều khiển (chỉ cần xét 1 chu kì điện) (0.5)
A
H
H
L
L
B
L
L
H
H
C
H
L
L
H
D
L
H
H
L
Tính thời gian delay (0.5)
360 360 200
1.8
pps
60 60 3( )
100 200
delay
T ms
rpm pps
Dựa vào bảng trên sinh viên vẽ lại lưu đồ giải thuật (0.5)
Số hiệu: BM1/QT-PĐBCL-RĐTV 1
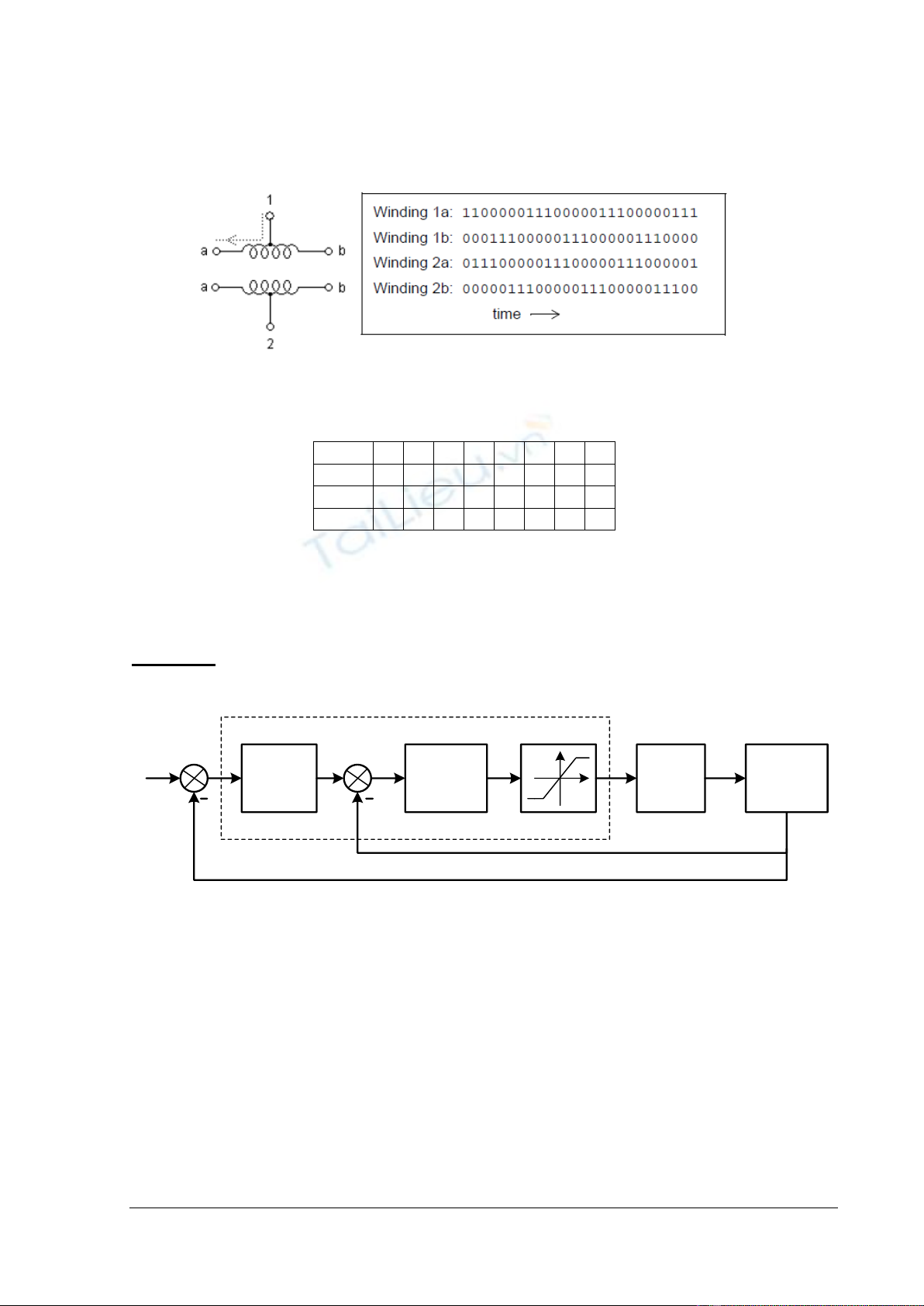
b. Viết giải thuật điều khiển động cơ chế độ nữa bước (half-step) với thời gian
delay như tính được ở câu a. Vận tốc của động cơ lúc này bằng bao nhiêu?
Trình tự kích half step của động cơ (0.25)
Giả sử A, B, C, D kết nối với 4 ngõ ra của một vi điều khiển bất kỳ, dựa trên trình tự
kích trên ta rút ra được mức logic điều khiển (chỉ cần xét 1 chu kì điện) (0.5)
A(1a)
H
H
L
L
L
L
L
H
B(1b)
L
L
L
H
H
H
L
L
C(2b)
L
L
L
L
L
H
H
H
D(2a)
L
H
H
H
L
L
L
L
Dựa vào bảng trên sinh viên vẽ lại lưu đồ giải thuật (0.5)
Nếu vẫn dùng thời gian delay như câu a, vận tốc động cơ giảm đi ½ và bằng
50 (RPM) (0.5)
Bài 2 (6đ)
a. Vẽ sơ đồ khối chi tiết bộ điều khiển, vi điều khiển sử dụng tùy ý (1)
Động cơ
và tải
Công
suất
position loop
velocity loop
Vi điều khiển
velocity
controller
position
controller
Sử dụng vi điều khiển 16-bit, ví dụ: dsPIC30F4011/12
(SV có thể vẽ sơ đồ như trong slide bài giảng, chương 2)
b. Viết giải thuật đọc encoder sử dụng ngắt ngoài (chế độ x2)? (1)
Để đọc encoder sử dụng ngắt ngoài chế độ x2, ta sử dụng 1 ngắt ngoài ở chế độ
cạnh lên (rising) và cạnh xuống (falling). Giả sử sử dụng 1 ngắt ngoài INT0 của 1
vi điều khiển bất kỳ kết nối với chân A của encoder, ta có giải thuật đọc encoder
trong ngắt:

Số hiệu: BM1/QT-PĐBCL-RĐTV 1
MAXCNT = 2000;
INT0_ISR{
if (((rising)&&(B==0))|((falling)&&(B==1)))
CountValue++;
else CountValue--;
if (CountValue==MAXCNT) CountValue=0; //reset bộ đếm
}
c. Viết giải thuật tính vận tốc động cơ dựa vào xung encoder (1)
Tính toán (0.5)
Tính thời gian ngắt :
60 60 15( )
2 _ 2 2000
T ms
RPM MAX
Sử dụng ngắt timer với thời gian ngắt tính như trên, ta có giải thuật tính vận tốc
trong ngắt như sau:
#define MAX_CNT = 1000*2
#define MAXSPEED = (unsigned int)(((unsigned long)MAX_CNT*2048)/125)
#define HALFMAXSPEED (MAXSPEED>>1)
Giải thuật (0.5)
Phần giải thuật trong ngắt giống slide 41, chương 3, của bài giảng. Lưu ý
công thức chuyển đổi sang vận tốc thật cuối cùng có thay đổi:
RealVel = (int)(((long)Speed*125)/2048);
d. Viết giải thuật điều khiển vận tốc cho động cơ?
Sử dụng bộ điều khiển PI để điều khiển vận tốc, phương trình bộ điều khiển:
( ) ( ) ( )
pI
u t K e t K e t dt
Thuật toán PI được viết cho hệ rời rạc tại thời điểm lấy mẫu thứ k (0.5)
PI
k k k
u u u
Trong đó,
P
k p k
u K e
I
k I k
u K T e
(sử dụng công thức tính tích phân lùi)
Giải thuật điều khiển tương tự như slide 46, chương 3 của bài giảng. Lưu ý
bỏ phần tính cho khâu (1)
e. Thiết kế quỹ đạo để điều khiển vị trí cho động cơ với yêu cầu:
- Động cơ quay 20 vòng trong 2 giây.
- Chuyển động điểm-điểm
- Phương pháp quỹ đạo hỗn hợp với vận tốc hình thang
Số hiệu: BM1/QT-PĐBCL-RĐTV 1
Tính toán các thông số cần thiết (0.5)
Góc quay:
20 2 40 ( )rad
Lựa chọn gia tốc khởi động cho động cơ, công thức 4.12 slide bài giảng.
2
2
44 40 40 ( / )
4
fi
c
f
qq
q rad s
t
Chọn
2
100 ( / )
c
q rad s
Thời gian tăng tốc, công thức 4.11 slide bài giảng:
24( )
1
22
f f c f i
c
c
t t q q q
tq
=0.225 (s)
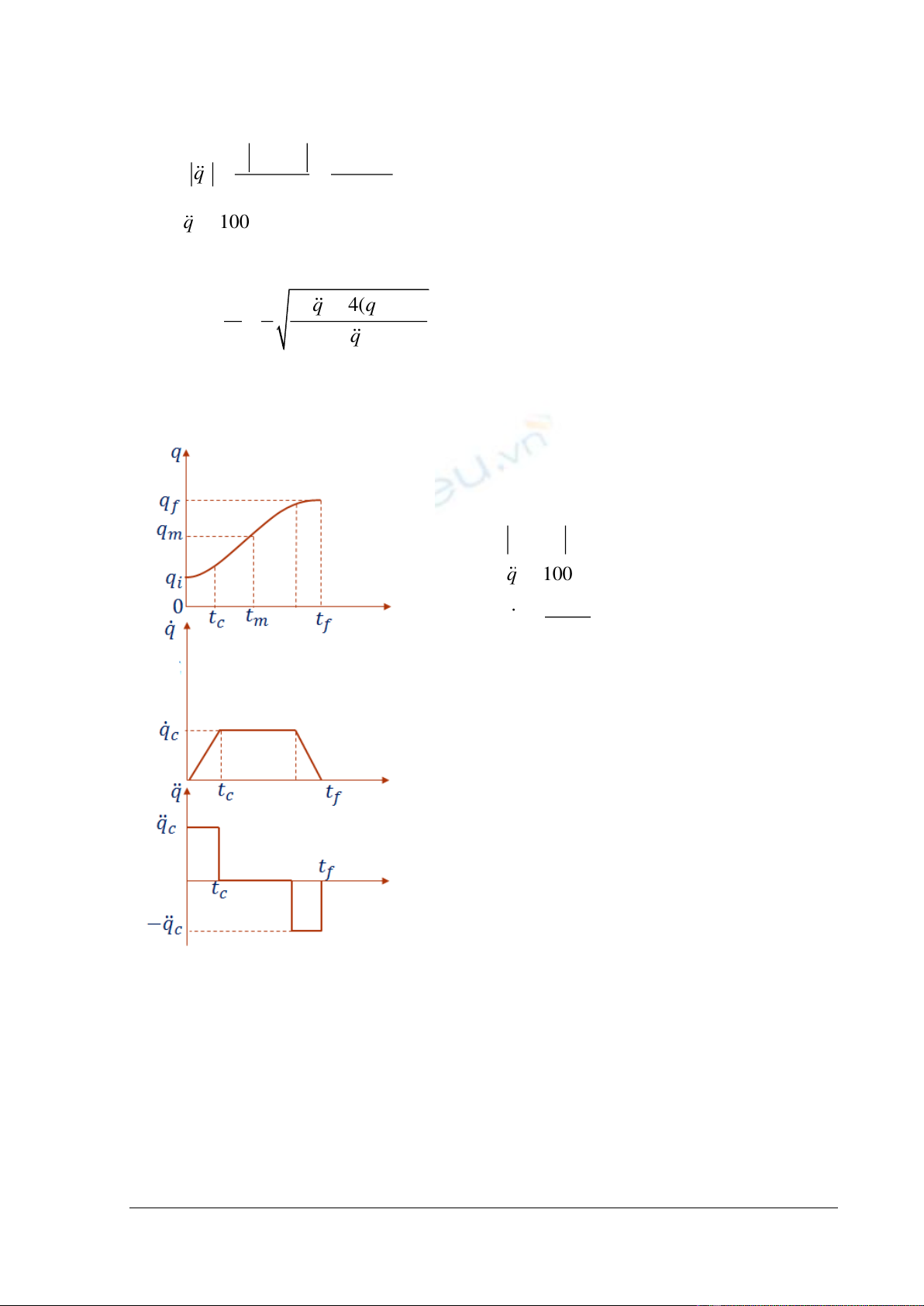
Tính quỹ đạo q(t) theo công thức (4.14) trong slide bài giảng (0.5)
Đồ thị vị trí, vận tốc, gia tốc (0.5)
Trong đó
0.225( )
c
ts
,
2( )
f
ts
40 ( )
fi
q q rad
2
100 (rad/ s )
c
q
200 (rad/ s)
3
c
q














![Chương trình đào tạo cơ bản Năng lượng điện mặt trời mái nhà [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260126/cristianoronaldo02/135x160/21211769418986.jpg)

![Chương trình đào tạo cơ bản Năng lượng gió [Tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260126/cristianoronaldo02/135x160/53881769418987.jpg)








