kHhdm}
TRU'CSNG DH SU' PHAM KY THUAT TPHCM
KHOA DAO TAO CHAT Llf(?NG CAO
BO MON CO DIEN TU”
DE THI CUOI HOC ICY I NAM HOC 23-24
Mon: HE THONG TRUYEN DQNG SERVO
Ma mon hoc: SERV334029
De so/Ma de: 01 De thi co 6 trang.
Thai gian: 75 phut.
Dupe phep su dung tai lieu.
SV lam bai true tiep tren de thi va nop lai de
Chu ky giam thi 1 Chu ky giam thi 2
Diem va chir ky
CB cham thi thu nhat CB cham thi thu hai
Ho va ten:
..................................................................
Ma so SV :
..................................................................
So TT:
.......................
Phong thi:
..............................
■ i> ■ :' ■ ■
Phan 1 (Trac nghiem 5 diem)
Cau 1 (0.5d). Choose the correct statement:
A. A current feedback signal is used to stabilize torque of a servo motor.
B. Torque saturation is a drawback of controlling a servo system
C. High speed opto couplers are used to isolate pulse signals in a servo system
D. All true
Cau 2 (0.5d). Cho d$ng ca buac PM chay a ch6 d0 vi buac vbi he so chia buac N = 20. Tinh xung
PWM a buac dau tien
..............................
?
Cau 3 (0.5d). Cau khang djnh nao sau day la DUNG:
A. Noi suy SA khong chay noi suy duang thang
B. Noi suy DS cho ket qua chinh xac han noi suy SA vi cho phep chay true X vaY
dong thai.
C. Noi suy lay mlu (sampled-data) cho ket qua chinh xac han cac phuang phap noi
suy xung chuan (reference pulses)
D. Tat ca deu SAI
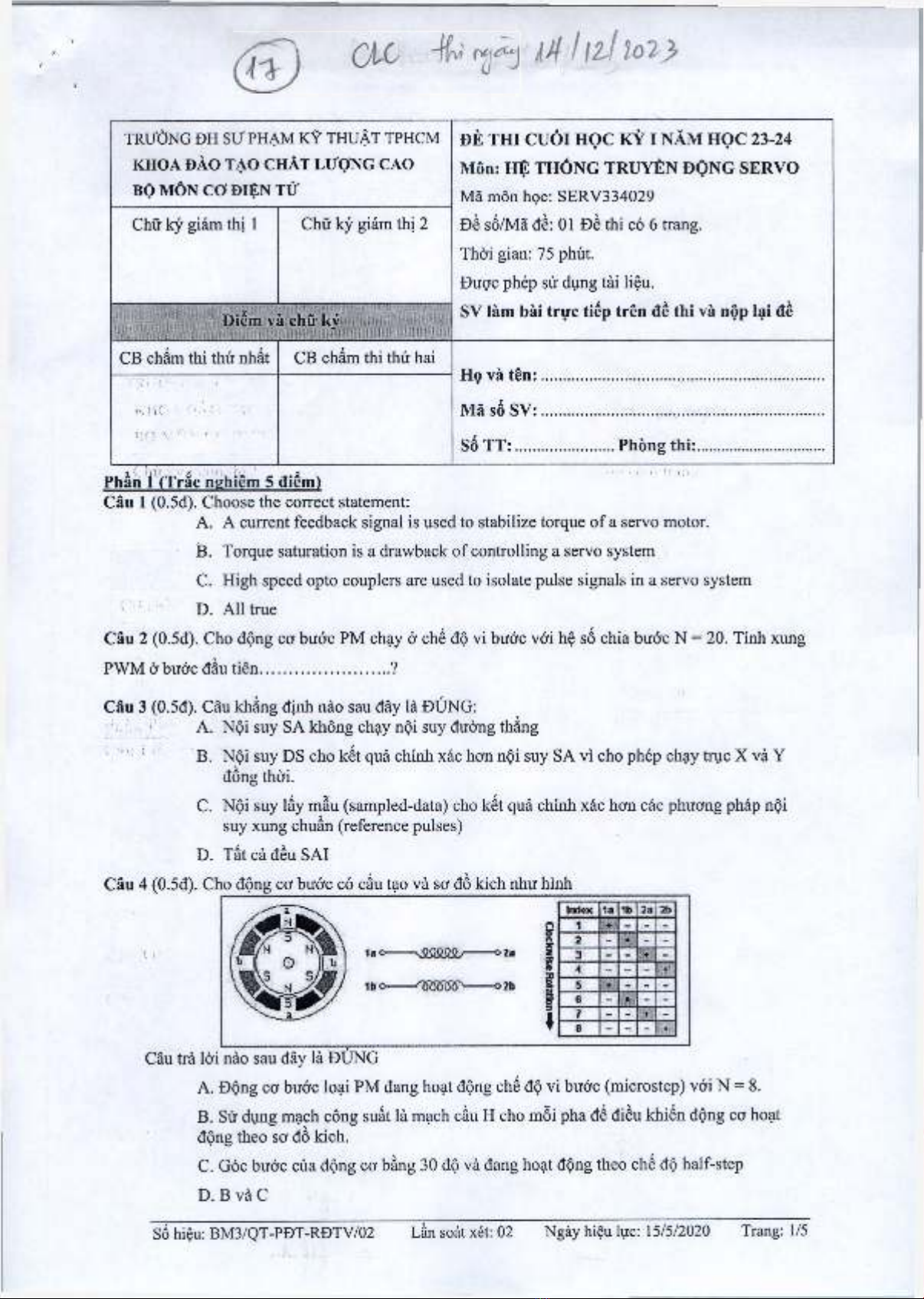
Cau 4 (0.5d). Cho dong ca buac co cau tap va sa do kich nhu hinh
_____________
/ | 1a0
------
1
ibe
-------
n n m s ''— »2b
|
Index 1a 1b 2a 2t>
1 + - - -
2- - -
3-- ♦ -
A- - *
5- - -
6- - -
7- - >-
8---«
Cau tra lai nao sau day la DUNG
A. Dong ca buac loai PM dang hoat dong che do vi buac (microstep) vai N = 8.
B. Sue dung mach cong suat la mach cau H cho moi pha de dieu khien dong ca hoat
dong theo sa do kich.
C. Goc buac ciia dong ca bang 30 do va dang hoat dong theo che do half-step
D. B va C
S6 hieu: BM3/QT-PDT-RDTV/02 Lin soat xet: 02 Ngay hieu luc: 15/5/2020 Trang: 1/5
Cau 5 (0.5d). Sir dung hinh cau 4, tinh t6c do dong ca biet thdi gian delay khi xuat xung T = 50 (ms)
A. 100 RPM
B. 50 RPM
C. 150 RPM
D
....................
(ghi ro dap an)
Cau 6 (0.5d). In a servo system, a PWM signal is:
A. to create a reference signal for a servo amplifier
B. is applied to a servo motor to control its velocity
C. normally isolated by a schottky diode
D. applied to the power amplifier
E. C and D
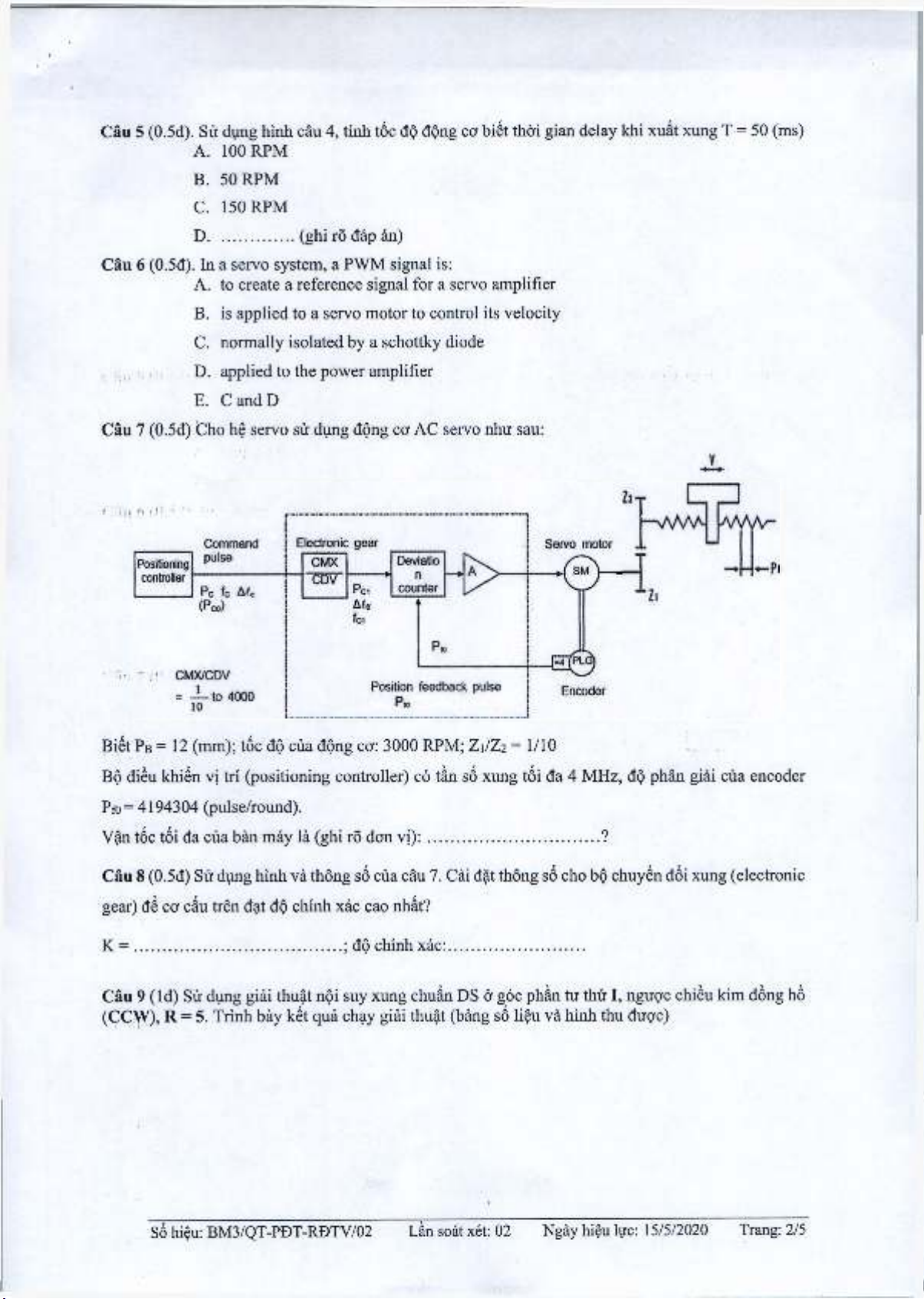
Cau 7 (0.5d) Cho he servo sir dung dong ca AC servo nhu sau:
V
Biet Pb = 12 (mm); toe do cua dong ca: 3000 RPM; Z1/Z2 = 1/10
Bo dieu khien vi tri (positioning controller) co tan so xung toi da 4 MHz, do phan giai cua encoder
Pro = 4194304 (pulse/round).
Van t6c t6i da cua ban may la (ghi ro dan v i):
........................................
?
Cau 8 (0.5d) Sir dung hinh va thong so cua cau 7. Cai dat thong so cho bo chuyen doi xung (electronic
gear) de ca cau tren dat do chinh xac cao nhat?
K = .................................................; do chinh xac:
................................
Cau 9 (Id) Sir dung giai thuat noi suy xung chuan DS a goc phan tu thir I, ngirge chieu kim dong ho
(CCW), R = 5. Trinh bay ket qua chay giai thuat (bang so lieu va hinh thu dugc)
S6 hieu: BM3/QT-PBT-RBTV/02 Ldn soat xet: 02 Ngay hieu lire: 15/5/2020 Trang: 2/5
Bang ket qua (0.5d) Ket qua goc I, CCW (0.5d)
Phan 2 (Tir luan 5 diem):
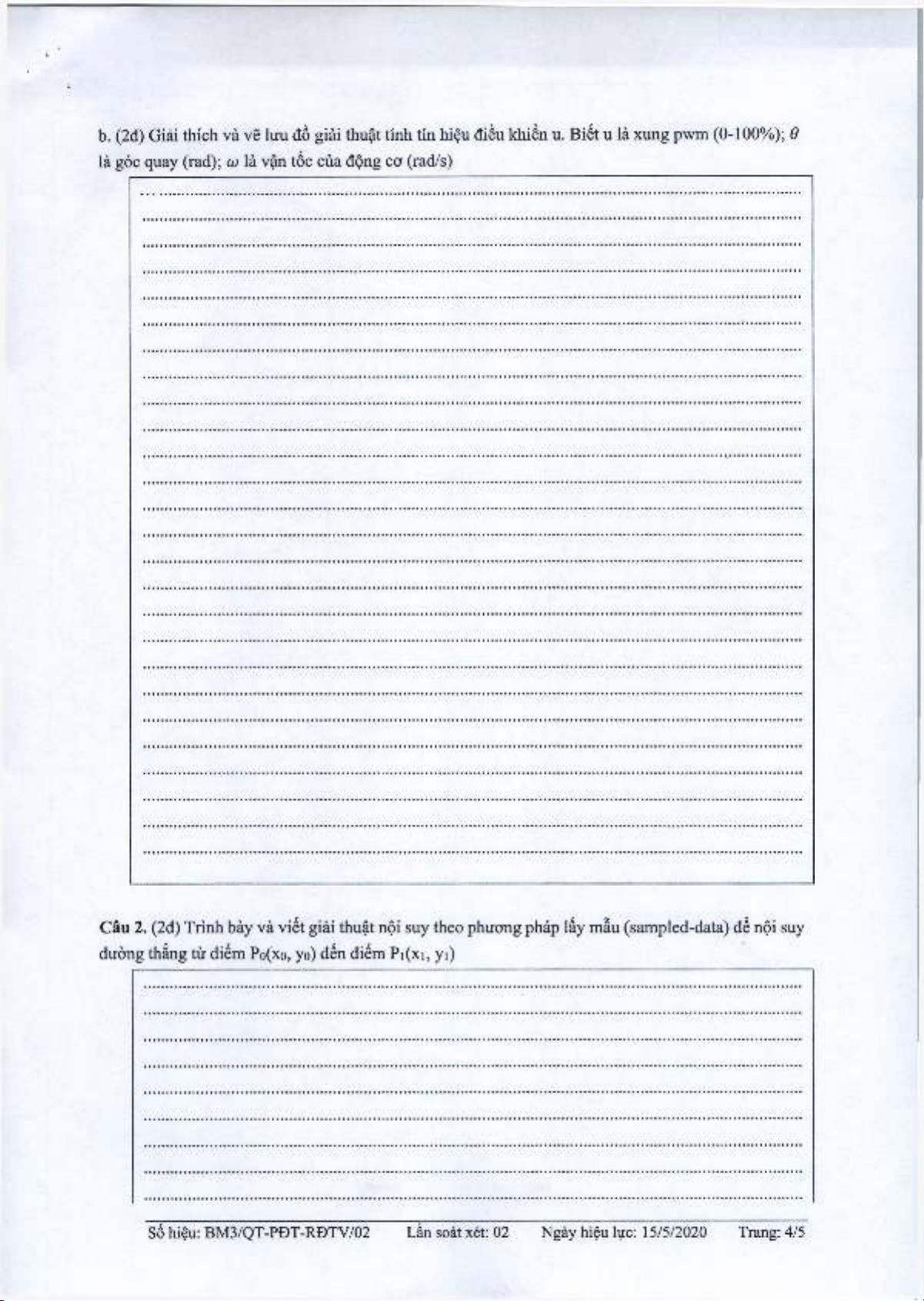
Cau 1 (3d): Cho he servo vi tri dung dong co DC servo co so do nhu hinh:
a. (Id) Controller la vi dieu khien STM32, hai duong hoi tiep (velocity va position loop) la tin hieu
doc tCr encoder. Ve so do ket noi tin hieu tir encoder voi vi dieu khien co sir dung opto coupler de
each ly?
S6 hieu: BM3/QT-PDT-RDTV/02 Lan soat xet: 02 Ngay hieu luc: 15/5/2020 Trang: 3/5
b. (2d) Giai thich va ve luu do giai thuat tinh tin hieu dieu khien u. Bi6t u la xung pwm (0-100%); 6
la goc quay (rad); co la van toe cua dQng co (rad/s)
Cau 2. (2d) Trinh bay va viet giai thuat noi suy theo phirang phap lay mau (sampled-data) de noi suy
duong thang tu diem Po(xo, yo) den diem Pi(xi, yi)
So hieu: BM3/QT-PDT-RDTV/02 Lan soat xet: 02 Ngay hieu luc: 15/5/2020 Trang: 4/5
Ghi chu: Can bo coi thi khong dicac giai thick de thi.
Chuan dau ra cua hoc phan (ve kien thuc) Noi dung kiem tra
CLO 2: Co kha nang giai thick, phan tich cac bai torn ky
thuat trong link vuc dieu khien he servo, tie do biet van
dung ket qua vao trong thiet ke cac bo phan cua mot he
thong servo ca dien tie.
Cau 1, 3, 4, 6 (trac nghiem).
Cau lb (tir luan)
Cau 2 (tu luan)
f \ r
CLO 3: Co kha nang tinh toan cac thong so can thiet khi
dieu khien he thong servo co dien tie. Cau 2, 5, 7, 8, 9 (trac
nghiem)
CLO 4: Co kha nang doc tai lieu chuyen nganh bang tieng
Anh Cau 1, 6 (trac nghiem)
CLO 7: Co kha nang viet phan mem, che tao phan cieng
cho cac bo dieu khien voi sie tra giup cac phan mem va
dung cu hap ly
Cau 1, Cau 2 (tu luan)
N g a y H thang /f^na m 20 2 3
Truong bo mon
So hieu: BM3/QT-PDT-RDTV/02 Lan soat xet: 02 Ngay hieu luc: 15/5/2020 Trang: 5/5









![Đề thi học kì 1 Hệ thống truyền động Servo 2020-2021 có đáp án [PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250401/lakim0906/135x160/9061743477176.jpg)





![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)