BỘ LAO ĐỘNG THƢƠNG BINH VÀ XÃ HỘI
TRƢỜNG CAO ĐẲNG KỸ NGHỆ II
ĐỀ CƢƠNG BÀI GIẢNG
Mô đun:
ĐIỀU KHIỂN KHÍ NÉN, THỦY LỰC
GIÁO VIÊN: BÙI QUANG HÒA
TP.HCM 3/2018

1
BÀI 1
TỔNG QUAN VỀ HỆ THỐNG THỦY LỰC, KHÍ NÉN
1.1. MỘT SỐ ĐẶC ĐIỂM CỦA HỆ THỐNG TRUYỀN ĐỘNG BẰNG KHÍ
NÉN:
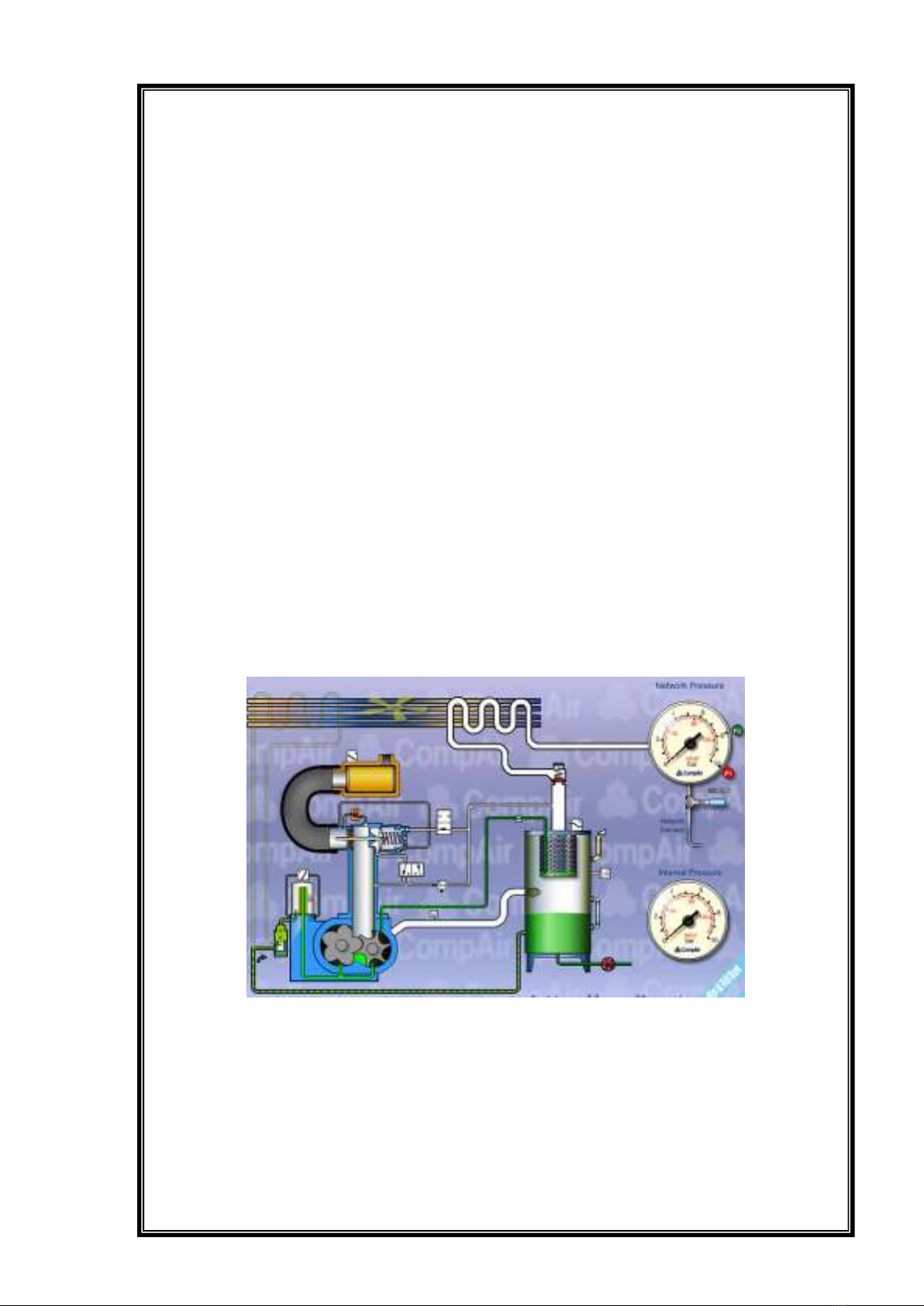
Hệ thống khí nén (Pneumatic Systems) đƣợc sử dụng rộng rãi trong công
nghiệp lắp ráp, chế biến, đặc biệt ở những lĩnh vực cần phải đảm bảo vệ sinh,
chống cháy nổ hoặc ở môi trƣờng độc hại. Ví dụ, lĩnh vực lắp ráp điện tử; chế
biến thực phẩm; các khâu phân loại, đóng gói sản phẩm thuộc các dây chuyền
sản xuất tự động; Trong công nghiệp gia công cơ khí; trong công nghiệp khai
thác khoáng sản…
• Các dạng truyền động sử dụng khí nén:
+ Truyền động thẳng là ƣu thế của hệ thống khí nén do kết cấu đơn giản và linh
hoạt của cơ cấu chấp hành, chúng đƣợc sử dụng nhiều trong các thiết bị gá kẹp
các chi tiết khi gia công, các thiết bị đột dập, phân loại và đóng gói sản phẩm…
+ Truyền động quay: trong nhiều trƣờng hợp khi yêu cầu tốc độ truyền động rất
cao, công suất không lớn sẽ gọn nhẹ và tiện lợi hơn nhiều so với các dạng truyền
động sử dụng các năng lƣợng khác, ví dụ các công cụ vặn ốc vít trong sửa chữa
và lắp ráp chi tiết, các máy khoan, mài công suất dƣới 3kW, tốc độ yêu cầu tới
hàng chục nghìn vòng/phút. Tuy nhiên, ở những hệ truyền động quay công suất
lớn, chi phí cho hệ thống sẽ rất cao so với truyền động điện.
1.2. NHỮNG ƢU ĐIỂM VÀ NHƢỢC ĐIỂM CỦA HỆ THỐNG TRUYỀN
ĐỘNG BẰNG KHÍ NÉN
1.2.1. Ƣu điểm :
+ Có khả năng truyền năng lƣợng đi xa, bởi vì độ nhớt động học của khí nén
nhỏ và tổn thất áp suất trên đƣờng dẫn nhỏ.
+ Do khả năng chịu nén (đàn hồi) lớn của không khí, nên có thể trích chứa
khí nén rất thuận lợi. Vì vậy có khả năng ứng dụng để thàỡnh lập một trạm trích
chứa khí nén.
+ Không khí dùng để nén, hầu nhƣ có số lƣợng không giới hạn và có thể thải
ra ngƣợc trở lại bầu khí quyển.
+ Hệ thống khí nén sạch sẽ, dù cho có sự rò rỉ không khí nén ở hệ thống ống
dẫn, do đó không tồn tại mối đe dọa bị nhiễm bẩn.

2
+ Chi phí nhỏ để thiết lập một hệ thống truyền động bằng khí nén, bởi vì
phần lớn trong các xí nghiệp, nhà máy đã có sẳn đƣờng dẫn khí nén.
+ Hệ thống phòng ngừa quá áp suất giới hạn đƣợc đảm bảo, nên tính nguy
hiểm của quá trình sử dụng hệ thống truyền động bằng khí nén thấp.
+ Các thành phần vận hành trong hệ thống (cơ cấu dẫn động, van, ...) có cấu
tạo đơn giản và giá thành không đắt.
+ Các van khí nén phù hợp một cách lý tƣởng đối với các chức năng vận
hành logic, và do đó đƣợc sử dụng để điều khiển trình tự phức tạp và các móc
phức hợp.
1.2.2. Nhƣợc điểm :
+ Lực để truyền tải trọng đến cơ cấu chấp hành thấp.
+ Khi tải trọng trong hệ thống thay đổi, thì vận tốc truyền cũng thay đổi
theo, bởi vì khả năng đàn hồi của khí nén lớn. (Không thể thực hiện đƣợc những
chuyển động thẳng hoặc quay đều).
+ Dòng khí thoát ra ở đƣờng dẫn ra gây nên tiếng ồn.
1.3. ĐƠN VỊ ĐO TRONG HỆ THỐNG ĐIỀU KHIỂN:
1.3.1. Áp suất:
Đơn vị cơ bản của áp suất theo hệ đo lƣờng SI là Pascal
1. Pascal là áp suất phân bố đều lên bề mặt có diện tích 1m2 với lực tác
động vuông góc lên bề mặt đó là 1 Newton (N)
1 Pascal (Pa) =1 N/m2
1 Pa = 1 kg m/s2/m2 = 1kg/ms2
Trong thực tế ngƣời ta dùng đơn vị bội số của Pascal là Megapascal (MPa).
1 MPa = 1.000.000Pa
Ngoài ra còn dùng đơn vị bar: 1 bar = 105Pa = 100.000Pa
1 kp/cm2 = 0,980665 bar = 0,981 bar
1 bar = 1,01972kp/cm2 = 1,02 kp/cm2
Trong thực tế ngƣời ta coi :
1 bar = 1 kp/cm2 = 1 at
Ngoài ra một số nƣớc (Anh, Mỹ) còn sử dụng đơn vị đo áp suất:
Pound (0,45336kg) per square inch (6,4521 cm2)
Kí hiệu lbf/in2 (psi)

3
1 bar = 14,5 psi
1psi = 0,06895 bar
1.3.2. Lƣu lƣợng :
Lƣu lƣợng dòng khí nén đƣợc tính:
Trong đó:
Q: lƣu lƣợng;
V: thể tích khí chuyển qua tiết diện ngang của đƣờng ống hay buồng
xilanh trong 1 đơn vị thời gian t
Lƣu lƣợng dòng khí nén có ý nghĩa quan trọng trong xác định tốc độ làm
việc của các cơ cấu chấp hành.
1.3.3. Lực:
Lực đẩy hay kéo của Piston gây bởi tác dụng của khí nén có áp suất P đƣợc
tính theo công thức:
F = P.A [N]
Trong đó:
P là áp suất khí nén [Pa]
A là điện tích bề mặt Piston[m2]
F lực tác dụng vuông góc với bề mặt Piston [N]
Trong hình vẽ, các diện tích A1 , A2 khác nhau (A2 = A1 –A3), A3 là diện tích
tiết diện của cần piston, nên các lực tác dụng cũng khác nhau tại cùng một
nguồn khí nén có áp suất P.
F1 = P.A1; F2 = P.A2 F1 > F2
1.3.4. Tốc độ truyền động của xy lanh:
Khi tải trọng của truyền động không đổi, tốc độ truyền động đƣợc xác định
theo quan hệ:
4
Khi Q[m3/s]; A[m2] thì v[m/s], nhƣ vậy, trong trƣờng hợp dung tích hành
trình của cơ cấu chấp hành và tải trọng không đổi, tốc độ truyền động tỷ lệ với
lƣu lƣợng Q.
Trong kỹ thuật khí nén, ngƣời ta dùng các van tiết lƣu ( điều tiết lƣu lƣợng)
để khống chế tốc độ của các cơ cấu chấp hành.
1.4. CÁC ĐỊNH LUẬT KHÍ:
1.4.1. Định luật khí lý tƣởng: Biểu diễn mối liên hệ giữa áp suất, thể tích và
nhiệt độ. Khi áp dụng các định luật này chúng ta chỉ sử dụng áp suất và nhiệt độ
tuyệt đối.
Đẳng áp : V/T = const
Đẳng tích : P/T = const
Đẳng nhiệt : P.V = const
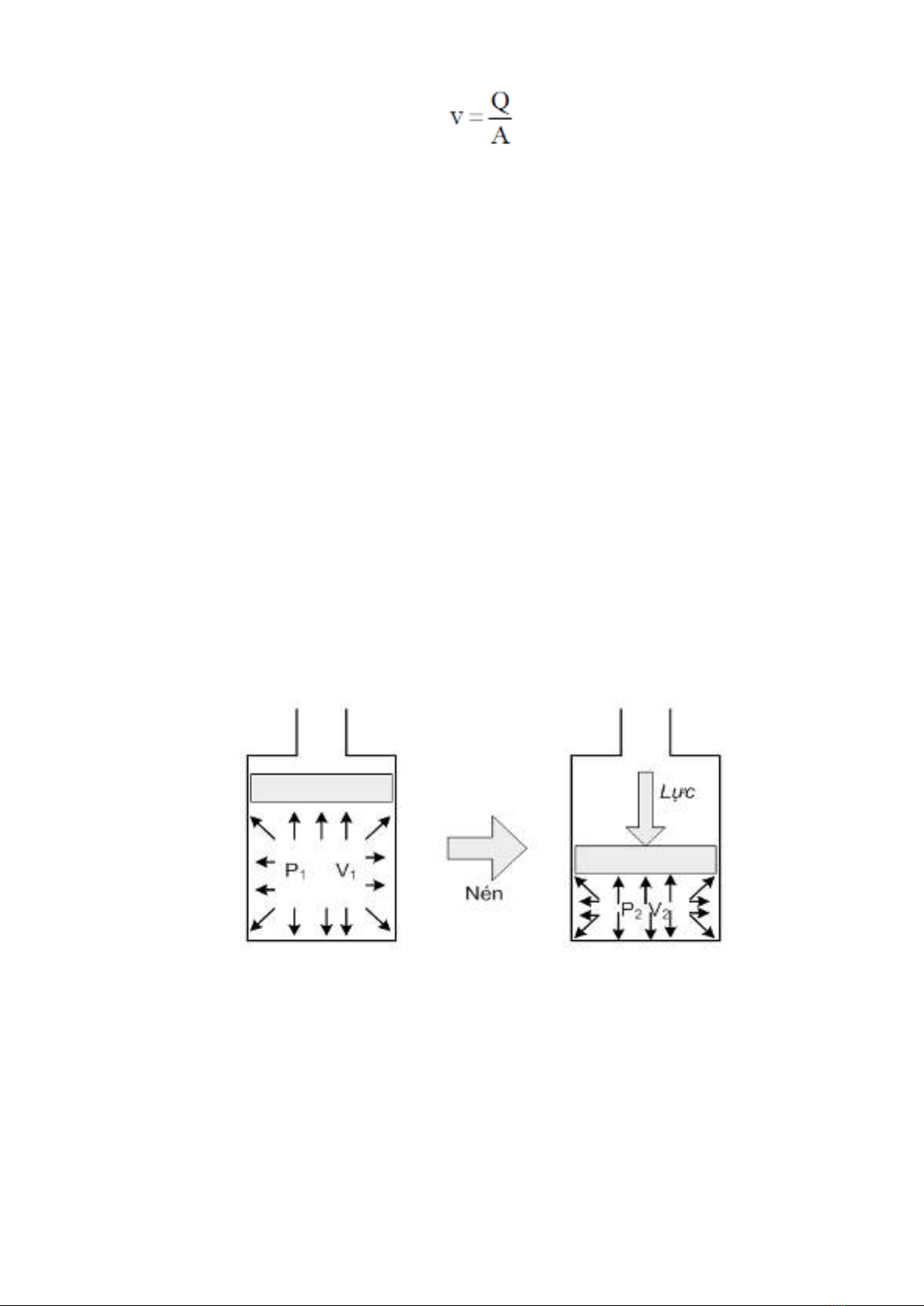
1.4.2. Định luật Boyle: Tích của áp suất tuyệt đối và thể tích của khối khí
luôn là hằng số nếu nhiệt độ của khí không thay đổi.
1.4.3. Định luật Pascal: Áp suất tác dụng lên dòng chảy sẽ đƣợc chuyền đi
theo mọi hƣớng với lực bằng nhau.
Với A là diện tích bề mặt tác dụng, P là áp suất và F là lực tạo ra.

![Giáo trình Sửa chữa hệ thống thủy lực, khí nén: Phần 2 [Chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20241130/nienniennhuy55/135x160/1409554070.jpg)
![Giáo trình sửa chữa hệ thống thủy lực, khí nén: Phần 1 [chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20241130/nienniennhuy55/135x160/1258441985.jpg)
![Giáo trình Sửa chữa hệ thống điện điều khiển thủy lực [Chuẩn Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20241130/nienniennhuy55/135x160/1051048720.jpg)








![Giáo trình Tính toán thiết kế hệ thống máy lạnh và điều hoà không khí (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoabattu2026/135x160/70831778842526.jpg)













%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)