BÀI 12 GIỚI THIỆU MỘT SỐ HỆ THỐNG I/O
Nguồn:3c.com.vn
Cơ chế quản lý nhập/xuất(I/O) của hệ điều hành được minh họa cụ thể qua việc điều
khiển các thiết bị I/O cụ thể. Trong bài này chúng ta tìm hiểu một số hệ thống I/O sau:
Hệ thống nhập xuất đĩa
Hệ thống nhập xuất chuẩn
Cài đặt đồng hồ
Qua bài học này, chúng ta hiểu được cơ chế quản lý nhập/xuất của hệ điều hành được thể
hiện cụ thể trên một số thiết bị I/O. Chúng ta cũng nắm được cơ chế tương tác giữa hệ
điều hành với các thiết bị đó và trên hết chúng ta thấy được vai trò của độc lập thiết bị.
Bài học này đòi hỏi những kiến thức về : kiến trúc máy tính, hệ thống quản lý I/O của hệ
điều hành.
I. HỆ THỐNG I/O ĐĨA
Hầu như tất cả các máy tính đều có đĩa để lưu trữ thông tin. Đĩa có ba ưu điểm chính hơn
sử dụng bộ nhớ chính để lưu trữ :
Dung lượng lưu trữ lớn hơn rất nhiều.
Giá trên một bit rẻ hơn.
Thông tin không bị mất đi khi không còn cung cấp điện.
I.1 Phần cứng đĩa
Một đĩa bao gồm nhiều cylinder, mỗi cylinder chứa nhiều track trên các head. Mỗi track
được chia làm nhiều sector (từ 8 đến 32). Mỗi sector có số byte là như nhau dù vị trí của
nó ở gần tâm hay ở ngoài rìa đĩa, những khoảng trống thừa không dùng đến.
Một đặc điểm thiết bị cài đặt quan trọng cho driver của đĩa là khả năng của bộ điều khiển
thực hiện tìm kiếm trên hai hay nhiều driver cùng lúc gọi là tìm kiếm chồng. Trong khi
bộ điều khiển và phần mềm đợi việc tìm kiếm hoàn tất trên một đĩa, bộ điều khiển có thể
khởi động việc tìm kiếm trên đĩa khác. Các bộ điều khiển không thể cùng lúc đọc hoặc
ghi trên hai driver vì khả năng này có thể làm giảm thời gian truy xuất trung bình.
I.2 Các thuật toán đọc đĩa
Tất cả
m
điều qu
a
vụ truy
x
Tốc độ
đ
đọc đến
là
s
eek t
đầu đọc
.
và bộ n
h
khoảng
t
đó để gi
Lập l
ị
Phương
dể lập t
r
theo th
ứ
98, 183,
Giả sử
h
183, 37,
Lập l
ị
Thuật t
o
trí hiện
h
98, 183,
Giả sử
h
67, 37,
1
m
ọi công vi
ệ
a
n trọng là
d
x
uất đĩa tốt
đ
ĩa bao gồ
m
track hay
c
ime. Một k
h
.
Thời gian
h
ớ chính g
ọ
t
hời gian t
r
ê
ảm thiểu t
h
ị
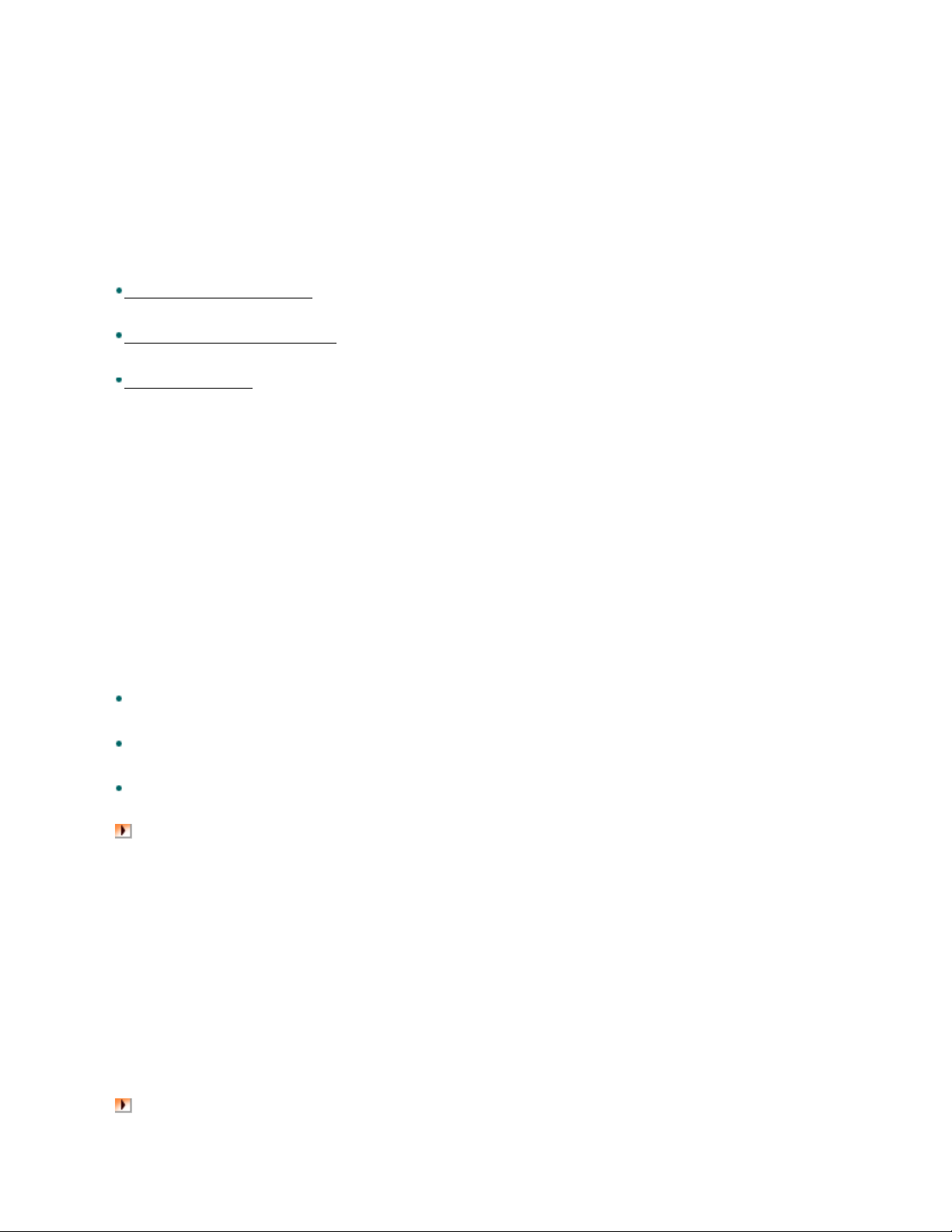
ch FCFS :
pháp lập lị
c
r
ình nhưng
k
ứ
tự như sa
u
37, 122, 1
4
h
iện tại đầu
122, 14, 1
2
ị
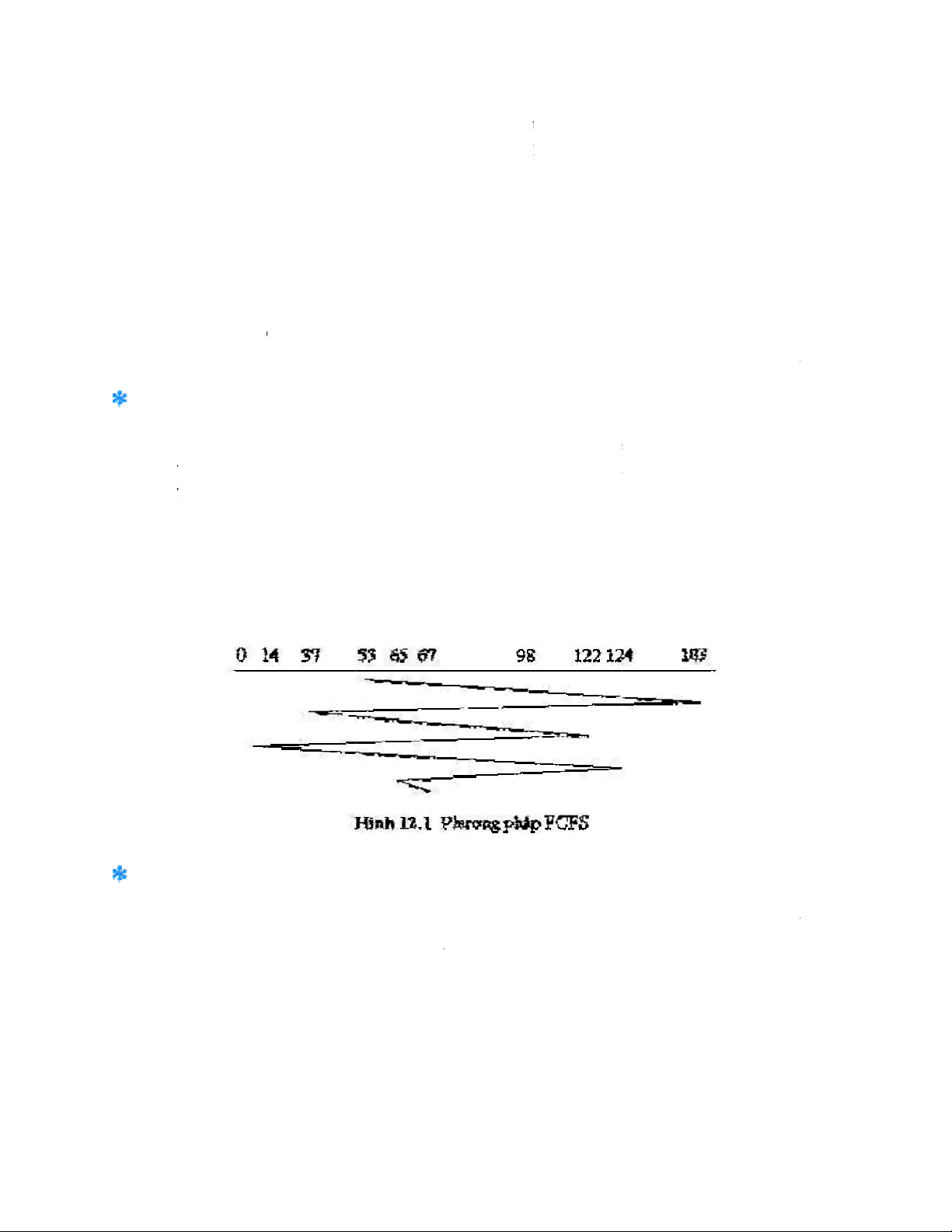
ch SSTF (
s
o
án này sẽ
d
h
ành của đ
ầ
37, 122, 1
4
h
iện tại đầu
1
4, 98, 122
,
ệ
c đều phụ
d
ịch vụ đĩa
hơn bằng
c
m
ba phần.
Đ
c
ylinder thí
c
h
i đã đến đ
ú
chờ này g
ọ
ọ
i là transfe
r
ê
n. Trong
đ
h
ời gian tru
y
c
h đơn giả
n
k
hông cun
g
u
:
4
, 124, 65,
v
đọc đang
ở
2
4, 65, và
6
s
hortest-s
e
d
i chuyển đ
ầ
ầ
u đọc nhấ
t
4
, 124, 65,
v
đọc đang
ở
,
124 và 18
3
thuộc vào
v
phải càng
n
c
ách lập lịc
h
Đ
ể truy xu
ấ
c
h hợp, tha
o
ú
ng track,
c
ọ
i là latenc
y
r
time. Tổn
đ
ó
s
eek tim
e
y
xuất hệ đ
i
n
nhất là F
C
g
cấp được
m
v
à 67
ở
vị trí 53.
N
6
7 như hìn
h
e
e
k
-time-fi
r
ầ
u đọc đến
t
. Ví dụ : c
ầ
v
à 67
ở
vị trí 53.
N
3
như hình
v
iệc nạp ch
ư
n
hanh càn
g
h
yêu cầu t
r
ấ
t các khối
t
o
tác này g
ọ
c
òn phải ch
y
time. Cuố
i
g thời gian
e
và latenc
y
i
ều hành đ
ư
C
FS(firs
t
-c
o
m
ột dịch v
ụ
N
hư vậy đầ
u
h
sau :
r
st)
các khối c
ầ
ầ
n đọc các
k
N
hư vậy đầ
u
sau :
ư
ơng t
r
ình
g
t
ốt. Hệ đi
ề
r
uy xuất đĩ
a
tr
ên đĩa, tr
ư
ọ
i là seek v
ờ cho đến
k
i
cùng là v
ậ
cho dịch v
ụ
y
time là m
ấ
ư
a ra các th
u
o
me,firs
t
-s
e
ụ
tốt. Ví d
ụ
u
đọc lần l
ư
ầ
n thiết the
o
k
hối như sa
u
u
đọc lần l
ư
và nhập xu
ề
u hành có
t
a
.
ư
ớc tiên ph
ả
à thời gian
k
hi khối cầ
n
ậ
n chuyển
d
ụ
đĩa chính
ấ
t nhiều th
ờ
u
ật toán lậ
p
e
rved). Thu
ậ
ụ
: cần phải
ư
ợt đi qua
c
o
vị trí lần
l
u
:
ư
ợt đi qua
c
ất tập tin,
d
t
hể tổ chức
ả
i di chuyể
n
để hoàn tấ
t
n
thiết đến
d
d
ữ liệu giữa
là tổng củ
a
ờ
i gian nhất
,
p
lịch truy
x
ậ
t toán này
đọc các kh
ố
c
ác khối 53
,
l
ượt gần v
ớ
c
ác khối 53
,
d
o đó
dịch
n
đầu
t
gọi
d
ưới
đĩa
a
ba
,
do
x
uất.
r
ất
ố
i
,
98,
ớ
i vị
,
65,
Với ví
d
Lập l
ị
Theo th
u
p
hía kia
98, 183,
Giả sử
h
14, 0 , 6
Thuật t
o
ảnh của
Lập l
ị
d
ụ này, thu
ậ
ị
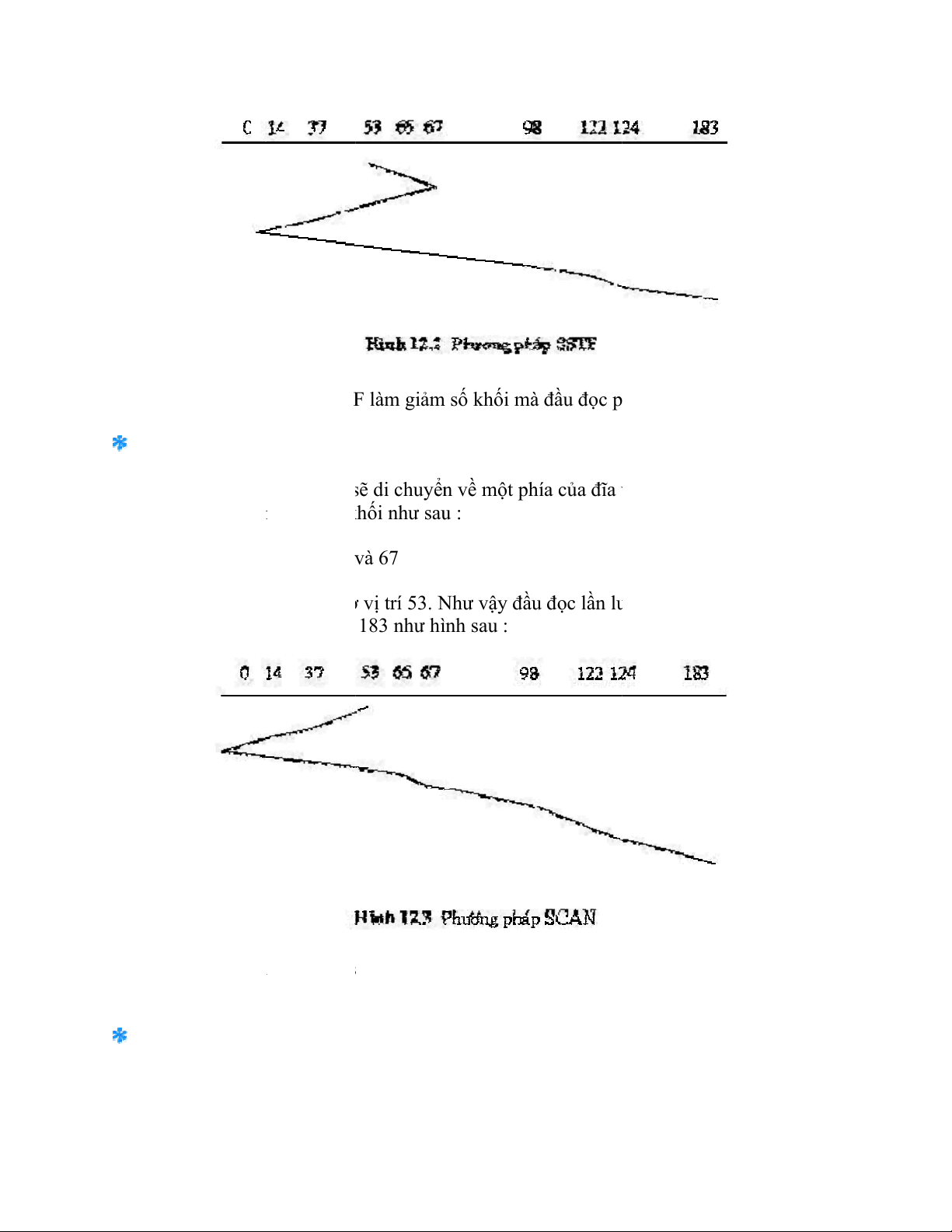
ch SCAN
u
ật toán nà
y
. Ví dụ : cầ
n
37, 122, 1
4
h
iện tại đầu
5, 67, 98, 1
o
án này cò
n
một người
ị
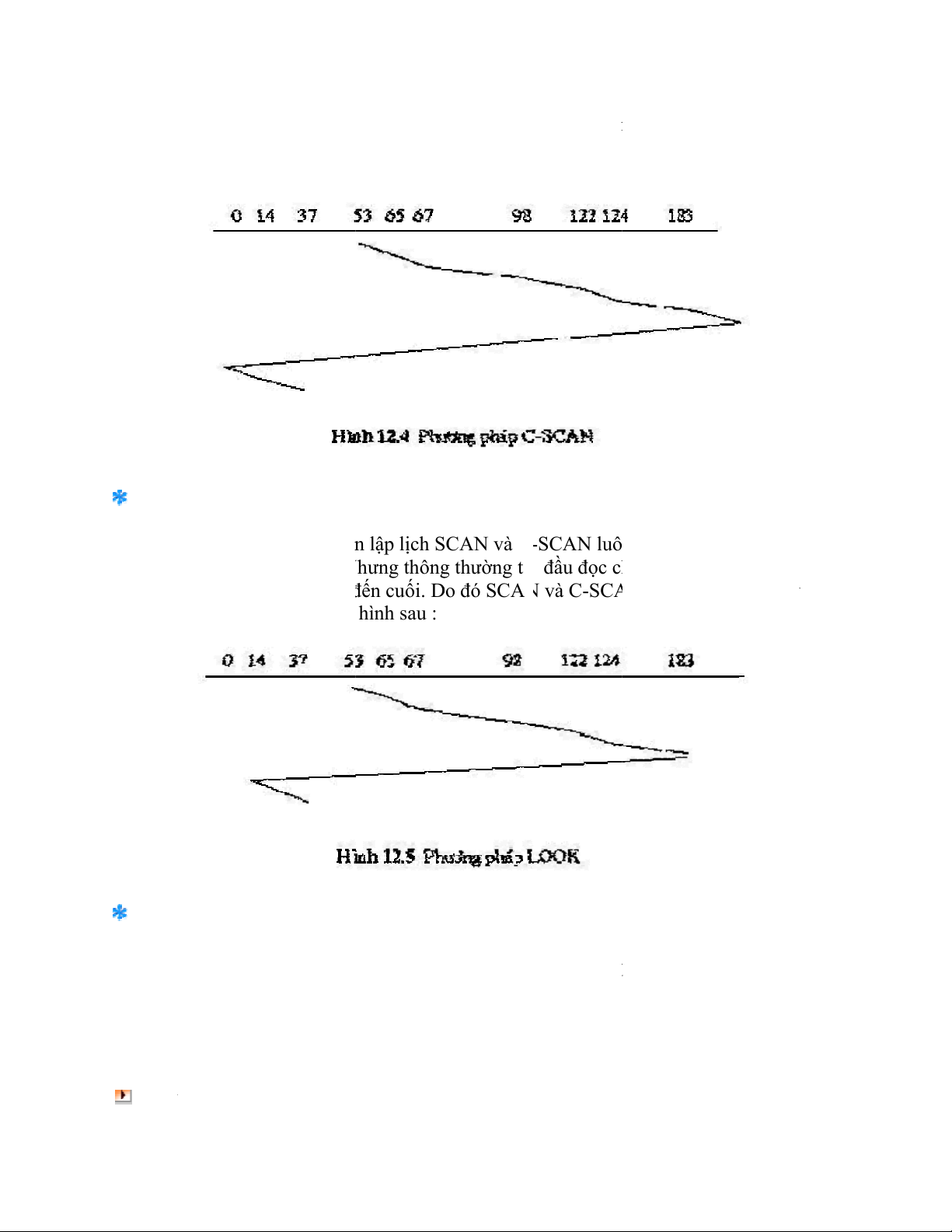
ch C-SCA
ậ
t toán SST
F
y
, đầu đọc
s
n
đọc các
k
4
, 124, 65,
v
đọc đang
ở
22, 124 và
n
được gọi l
à
quét tuyết,
N
F
làm giả
m
s
ẽ di chuyể
n
k
hối như sa
u
v
à 67
ở
vị trí 53.
N
183 như h
ì
à
thuật toá
n
hay quét l
á
m
số khối m
à
n
về một p
h
u
:
N
hư vậy đầ
u
ì
nh sau :
n
thang má
y
á
.
à
đầu đọc p
h
ía của đĩa
v
u
đọc lần l
ư
y
. Hình ản
h
hải di chu
y
v
à từ đó di
ư
ợt đi qua
c
h
thuật toán
y
ển là 208
k
chuyển qu
a
c
ác khối 53
,
giống như
k
hối.
a
,
37,
hình
Thuật t
o
nào đó
c
truy xu
ấ
Lập l
ị
Nhận x
é
đ
ĩ
a từ đ
ầ
nhất ở
m
và gọi l
à
Lựa c
Với nh
ữ
toán SS
T
thống p
h
trọng là
liên tục
t
I.3 Q
u
o
án này tươ
n
c
ủa đĩa, nó
s
ấ
t các khối
s
ị
ch LOOK
é
t rằng cả h
a
ầ
u này san
g
m
ỗi hướng
c
à
lập lịch L
O
họn thuật
ữ
ng thuật to
á
T
F thì
r
ất t
h
h
ải truy xu
ấ
khối lượn
g
t
hì FCFS l
à
u
ản lý lỗi
n
g
t
ự như t
h
s
ẽ lập tức t
r
s
ẽ là : 53, 6
:
a
i thuật toá
n
g
đầu kia.
N
c
hứ không
đ
O
OK. Như
toán lập lị
c
á
n lập lịch,
h
ông thườn
g
ấ
t dữ liệu k
h
g
về số và k
i
à
thuật toán
h
uật toán S
r
ở về đầu b
ắ
5, 67, 98, 1
n
lập lịch
S
N
hưng thôn
g
đ
ến cuối.
D
hình sau :
c
h :
vấn đề là
p
g
. Thuật to
á
h
ối lượng l
ớ
i
ểu khối cầ
n
tốt.
CAN, chỉ
k
ắ
t đầu của
đ
22, 124, 1
8
S
CAN và C
-
g
thường th
D
o đó SCA
N
p
hải lựa ch
ọ
á
n SCAN
v
ớ
n. Với bất
n
truy xuất
.
k
hác là khi
n
đ
ĩa. Lấy lại
8
3, 199, 0,
1
-
SCAN luô
ì đầu đọc c
h
N
và C-SC
A
ọ
n thuật to
á
v
à C-SCA
N
kỳ thuật t
o
.
Ví dụ , nế
u
n
ó di chuy
ể
ví dụ t
r
ên,
1
4, 37 như
h
n luôn chu
y
h
ỉ chuyển
đ
A
N được c
h
á
n nào cho
h
N
thích hợp
c
o
án lập lịch
u
số khối c
ầ
ể
n đến một
khi đó thứ
h
ình sau :
y
ển đầu đọ
c
đ
ến khối xa
h
ỉnh theo th
ự
h
ệ thống. T
h
c
ho những
nào, điều
q
ầ
n truy xuấ
t
đầu
tự
c
của
ự
c tế
h
uật
hệ
q
uan
t
là
Đĩa là đối tượng mà khi truy xuất có thể gây nhiều lỗi. Một trong số các lỗi thường gặp là
:
Lỗi lập trình : yêu cầu đọc các sector không tồn tại.
Lỗi lập trình xảy ra khi yêu cầu bộ điều khiển tìm kiếm cylinder không tồn tại, đọc sector
không tồn tại, dùng đầu đọc không tồn tại, hoặc vận chuyển vào và ra bộ nhớ không tồn
tại. Hầu hết các bộ điều khiển kiểm tra các tham số và sẽ báo lỗi nếu không thích hợp.
Lỗi checksum tạm thời : gây ra bởi bụi trên đầu đọc.
Bụi tồn tại giữa đầu đọc và bề mặt đĩa sẽ gây ra lỗi đọc. Nếu lỗi tồn tại, khối có thể bị
đánh dấu hỏng bởi phần mềm.
Lỗi checksum thường trực : đĩa bị hư vật lý trên các khối.
Lỗi tìm kiếm : ví dụ đầu đọc đến cylinder 7 trong khi đó phải đọc 6.
Lỗi điều khiển : bộ điều khiển từ chối thi hành lệnh.
I.4 RAM Disks
Ý tưởng RAM disk khá đơn giản. Thiết bị khối là phần lưu trữ trung gian với hai lệnh :
đọc một khối và ghi một khối. Thông thường những khối này được lưu trữ trên đĩa mềm
hoặc đĩa cứng. RAM disk dùng một phần đã định vị trước của bộ nhớ chính để lưu trữ
các khối. RAM disk có ưu điểm là cho phép truy xuất nhanh chóng (không phải chờ quay
hay tìm kiếm). Như vậy nó thích hợp cho việc lưu trữ những chương trình hay dữ liệu
được truy xuất thường xuyên.
![Trắc nghiệm Tin học cơ sở: Tổng hợp bài tập và đáp án [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250919/kimphuong1001/135x160/59911758271235.jpg)



![Bài giảng Phần mềm mã nguồn mở [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250526/vihizuzen/135x160/6381748258082.jpg)
![Tài liệu giảng dạy Hệ điều hành [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250516/phongtrongkim0906/135x160/866_tai-lieu-giang-day-he-dieu-hanh.jpg)


![Bài giảng Hệ điều hành: Trường Đại học Công nghệ Thông tin (UIT) [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250515/hoatrongguong03/135x160/6631747304598.jpg)







![Đề thi Excel: Tổng hợp [Năm] mới nhất, có đáp án, chuẩn nhất](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251103/21139086@st.hcmuaf.edu.vn/135x160/61461762222060.jpg)


![Bài tập Tin học đại cương [kèm lời giải/ đáp án/ mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251018/pobbniichan@gmail.com/135x160/16651760753844.jpg)
![Bài giảng Nhập môn Tin học và kỹ năng số [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251003/thuhangvictory/135x160/33061759734261.jpg)
![Tài liệu ôn tập Lý thuyết và Thực hành môn Tin học [mới nhất/chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251001/kimphuong1001/135x160/49521759302088.jpg)


