4/9/2013
1
BộBộ mônmôn TínTín HiệuHiệu & & HệHệ ThốngThống
20122012--20132013
1
2
•Thời lượng môn học:
–3 ĐVHT (20LT + 4BT + 6TH + 15 Tự Học)
•Mục tiêu:
–Kiến thức: Cung cấp cho người học những khái niệm và kiến thức cơ bản về
mô hình hóa và mô phỏng. Nội dung của môn học sẽ tập trung vào phương
pháp luận cũng như công cụ mô phỏng hệ thống truyền thông làm cơ sở cho
các môn học chuyên sâu khác và hỗ trợ cho làm đồ án tốt nghiệp.
–Kỹ năng: Rèn cho sinh viên có kỹ năng sử dụng bộ công cụ chương trình
MATLAB và Simulink, và các phương pháp cơ bản áp dụng cho việc mô phỏng
các hệ thống truyền thông.
•Đánh giá:
−Tham gia học tập trên lớp: 10%
− Thực hành-Thí nghiệm 10%
−Bài tập/Thảo luận: 20 %
− Kiểm tra giữa kỳ: 10%
− Kiểm tra cuối kỳ: 50%
4/9/2013
2
3
•Nội dung:
–Chương 1: Tổng quan về kỹ thuật mô phỏng
–Chương 2: Giới thiệu về MATLAB
–Chương 3: Giới thiệu về Simulink
–Chương 4: Mô phỏng tín hiệu và quá trình thu phát
–Chương 5: Mô phỏng kênh thông tin
–Chương 6: Ước tính tham số và đánh giá hiệu năng
4
• Tài liệu tham khảo:
[1] Michel C. Jeruchim, Philip Balaban, Simulation of Communication Systems: Modeling,
Methodology and Techniques, 2nd ed., Kluwer Academic/Plenum Publishers, 2000.
[2] Nguyễn Viết Đảm, Mô phỏng hệ thống viễn thông và ứng dụng MATLAB, NXB Bưu Điện,
2007.
[3] J. G. Proakis, M. Salehi, G. Bauch, Contemporary Communication Systems Using MATLAB
and Simulink, 3rd ed., Cengage Learning, 2012.
[4] O. Beucher, M. Weeks, Introduction to MATLAB and Simulink: A Project Approach, 3rd ed.,
Infinity Science Press, 2008.
[5] Mathworks Inc., MATLAB and Simulink Student Version: Getting Started With MATLAB, 2007.
[6] Steven C. Chapra, R. P. Canale, Numerical Methods for Engineers, 6th ed., Mcgraw-Hill, 2010.
[7] Dennis Silages, Digital Communication Systems using MATLAB and Simulink, Bookstand
Publishing, 2009.
[8] K. C. Raveendranathan, Communication Systems Modeling and Simulation using MATLAB
and Simulink, Universities Press, 2011.
[9] Mohsen Guizani, Ammar Rayes, Bilal Khan, Ala Al-Fuqaha, Network Modeling and Simulation:
A Practical Perspective, Wiley, 2010.
4/9/2013
3
5
•Độ phức tạp của hệ thống truyền thông hiện đại:
– Ngày càng tăng lên
– Tính phức tạp do:
•Cấu trúc phức tạp của hệ thống
• Môi trường được triển khai
• Yêu cầu về đồng bộ do hoạt động tại tốc độ cao
động lực thúc đẩy sử dụng mô phỏng (simulation)
•Sự phát triển của máy tính số
–Khả năng xử lý, giá thành, độ thân thiện, ...
•Ứng dụng mô phỏng
– Giúp hiểu biết sâu cư xử của hệ thống
– Cho phép triển khai thí nghiệm tương tự như hệ thống
thực giảm thiểu chi phí và thời gian cho việc thiết kế hệ
thống
6
4/9/2013
4
7
• Bài toán mô phỏng: gồm 4 bước cơ bản
– Ánh xạ bài toán đã cho thành mô hình mô phỏng
– Phân giải bài toán tổng thể thành một tập các bài
toán nhỏ hơn
–Lựa chọn các kỹ thuật mô hình hóa, mô phỏng, ước
tính phù hợp và áp dụng chúng để giải quyết các bài
toán nhỏ của chúng
–Kết hợp các kết quả của các bài toán con xử lý tạo
ra nghiệm cho bài toán tổng thể.
•Gần đúng bài toán dễ dàng cho phân tích:
– Phân tích
– Mô phỏng
• Phân tích
– Tính toán một số đặc trưng cho một đại lượng quan tâm
• Mô phỏng
– Sao chép hệ thống quan tâm: xử lý một đại lượng động giám
sát hệ thống tại các điểm khác nhau
–Sử dụng mô hình thực
– Có thể thay đổi mô tả của bất kỳ một phần tử trong hệ thống
(tính module)
•Hệ thống thông tin thực:
– Quá phức tạp để đặc trưng và mô phỏng Đơn giản hóa một
số mặt của bài toán (Giảm độ phức tạp) dễ dàng hơn cho
việc tính toán
8
4/9/2013
5
9
• Ví dụ:
–Dạng sóng đầu ra Vtcủa hệ thống: Vt= g()
• g – đặc tính truyền đạt hệ thống; = (z1, z2,..., zK) – tập các quá
trình đầu vào (rời rạc thời gian)
–Chức năng mô phỏng:
•Tạo ra chuỗi giá trị {Vt} tại t = kTs, k = 1, 2,...; Ts– chu kỳ lấy
mẫu
•Chuỗi được xử lý thu được đại lượng hiệu năng hoặc thông
tin phù hợp
– Thí nghiệm điều kiện:
•Tạo ra Vt= g(’) với = (z1,..., zk,... , zk+1=k+1,.., zK=K)
• k quá trình đầu tiên được mô phỏng, còn lại được giữ tại giá trị
cố định
• Thí nghiệm lặp lại cho một tập các điều kiện
– Thí nghiệm mô phỏng:
•Tạo ra Vt= g’(’), g’ - đặc tính truyền đạt hệ thống được đơn
giản hóa
10
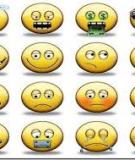
Xử lý tín hiệu số Lý thuyết
xác suất
Lý thuyết
truyền thông
Phân tích số Khoa học
máy tính
Mô phỏng các
hệ thống
truyền thông
Lý thuyết hệ
thống tuyến tính
Lý thuyết
ước tính
Lý thuyết số
Lý thuyết quá
trình ngẫu nhiên
Các lĩnh vực ảnh hưởng lên nghiên cứu mô phỏng các hệ thống truyền thông












![Bài giảng Tin học đại cương Trường Đại học Lâm Nghiệp [Năm mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/85781779160272.jpg)
![Giáo trình Cấu trúc dữ liệu và giải thuật - TS. Đào Thị Hường [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/49281779160273.jpg)





![Câu hỏi ôn tập Đồ hoạ máy tính [năm/khóa/chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/48771779155952.jpg)





%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)