Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
145
PHƯƠNG PHÁP ĐIỀU CHẾ CHỐNG NHIỄU ĐỘNG
DÒNG ĐIỆN TRỄ DỰA VÀO TUYẾN TÍNH HOÁ SÓNG HÀI
Bùi Văn Đại1, Vũ Minh Quang2
1Đại học Thuỷ lợi, email: daibv@tlu.edu
2Đại học Thuỷ lợi, email: quang_vm@tlu.edu.vn
1. GIỚI THIỆU CHUNG
Dựa vào thiết bị lọc có nguồn (HAPF),
thiết bị điều khiển PWM theo dòng điện [2]
thực hiện tương đối thành công: điều khiển
trễ thực hiện dễ, tính năng động tốt do vậy
được ứng dụng rộng rãi.
Trong tài liệu [2] và [3], tần số đóng cắt là
cố định. Trong [4] và [5] sử dụng phương
pháp mô tả hàm số phân tích tính ổn định,
tiến hành giảm nhỏ sóng nhiễu.
Tuy nhiên với tính trạng tự rung động phát
sinh hiện chưa có phương pháp giải quyết
hiệu quả. Trong [6] đề xuất phương pháp tự
chỉnh định, tuy nhiên dựa vào thiết bị biến
đổi chưa xác định tham số tối ưu.
Trong [7] đề xuất phương pháp tuyến tính
hoá sóng hài, tuy nhiên chưa nghiên cứu lúc
điều chế dòng điện.
Dựa vào luật điều khiển ITAE (integral
time absolute error) có thể tăng cường năng
lực chịu nhiễu tác động với tham số thiêt kế
tối ưu. Sóng hài tuyến tính hoá đáp ứng được
sử dụng làm hệ thống phi tuyến rung động
trở thành hệ thống tuyến tính, làm cho nó bao
gồm các ưu điểm của cả hệ thống phi tuyến
và tuyến tính.
Do đó, bài báo dựa vào luật điều khiển
ITAE, thực hiện khâu trung gian hồi trễ điều
khiển tối ưu hoá, thiết kế tham số 2 lần tối
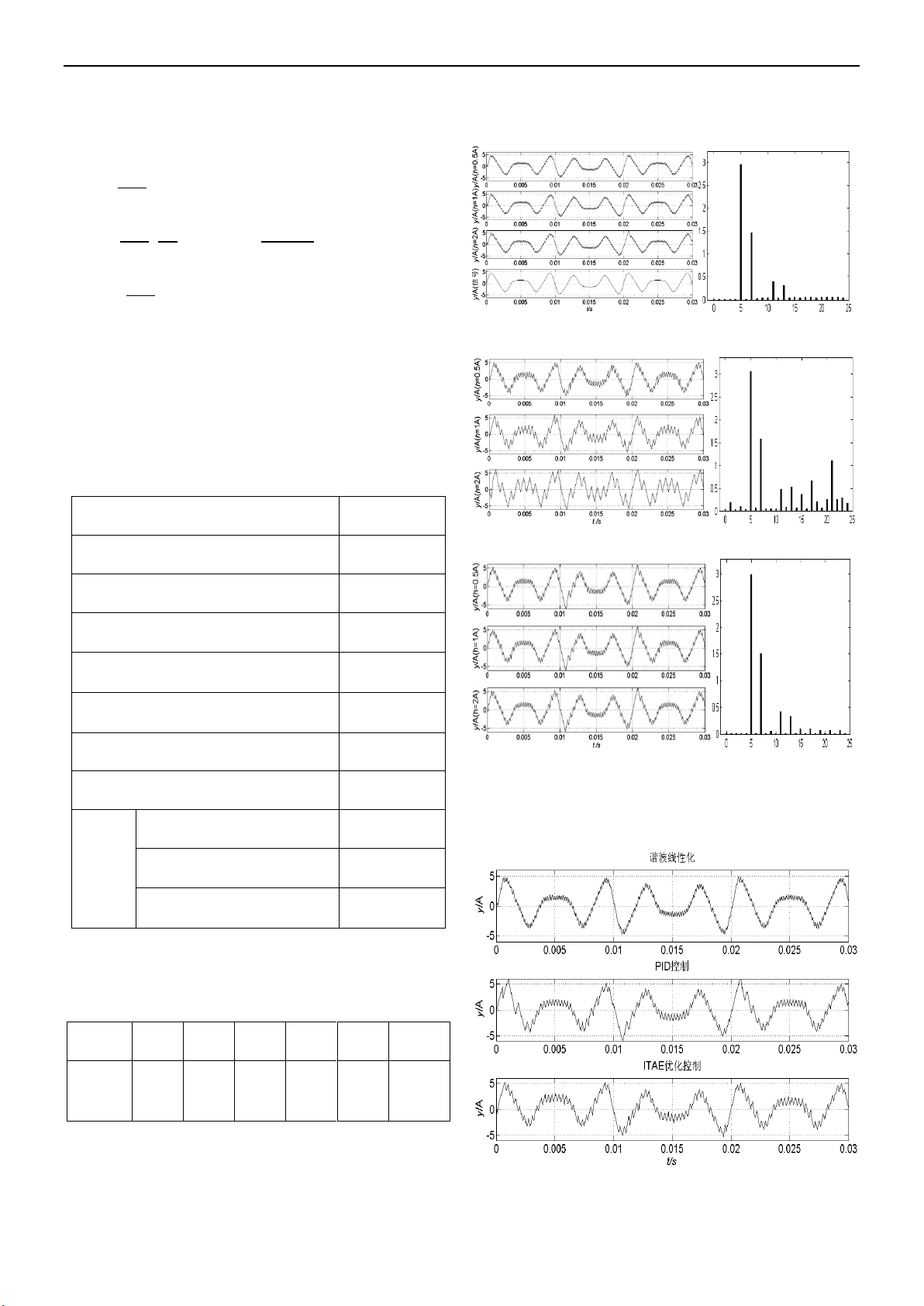
ưu. Dùng phương pháp tuyến tính hoá sóng
hài đối với khâu hồi trễ, tuyến tính hoá mạch
phản hồi phi tuyến. Kết quả mô phỏng cho
thấy dòng điện điều khiển có khả năng kháng
nhiễu mạnh.
2. PHƯƠNG PHÁP NGHIÊN CỨU
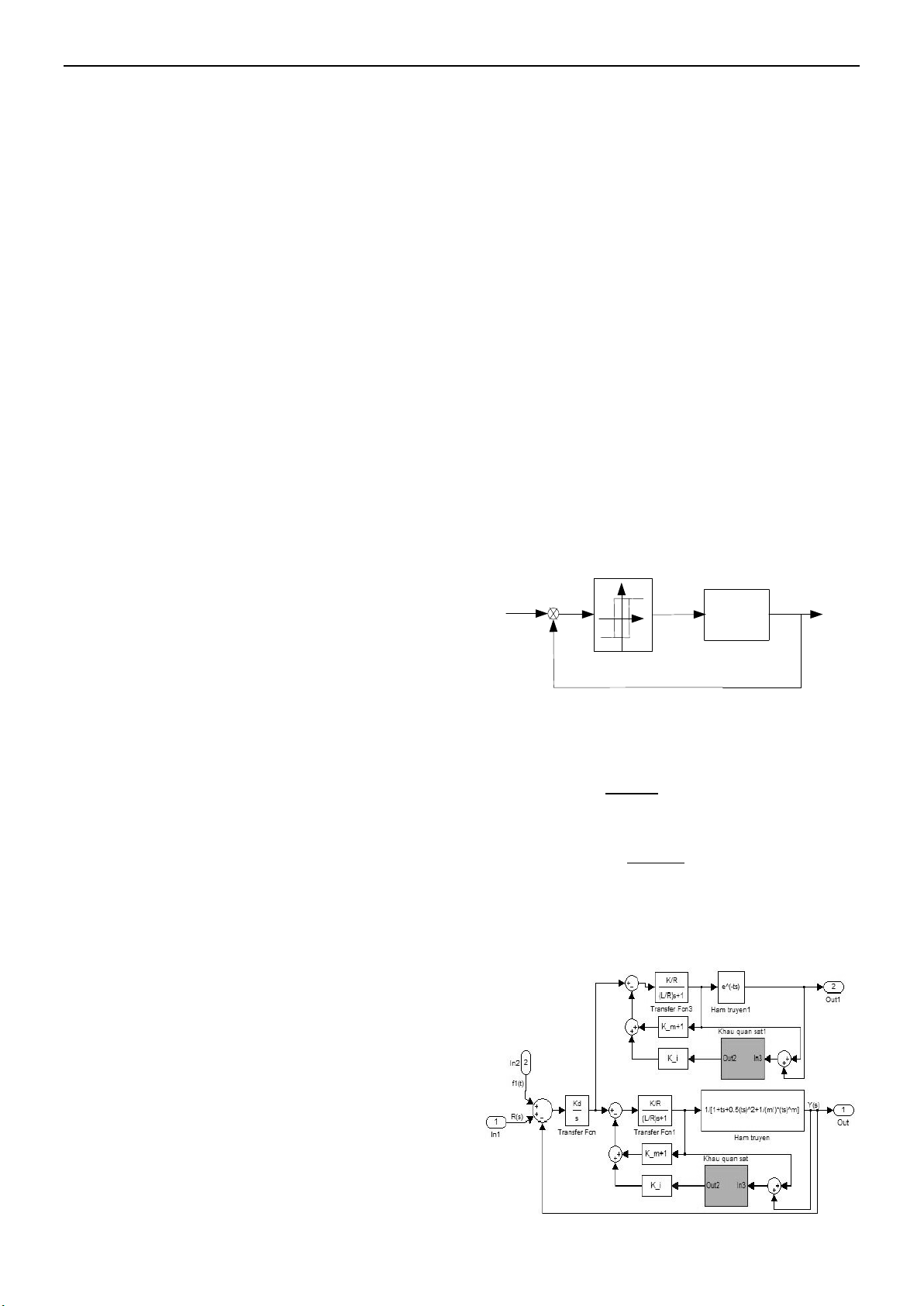
a) Nguyên lý điều khiển dòng điện hồi trễ
Thành phần sóng điện áp dây 1 chiều
thông qua hàm tính toán, cộng thêm giá trị
đặt f1(t).
Mạch hồi trễ so sánh sai khác để thực hiện
điều chế PWM đóng cắt các van.
*i
i
M
h
x
()Ps
i
Hình 1: Sơ đồ nguyên lý
Hàm truyền các khâu:
os
c
()
() () s
Us
f s K e
Us
(1)
1
/
( ) e
1s
KR
Ps Ts
(2)
b) Định luật Peima và điều khiển tối ưu ITAE