THIẾT KẾ HỆ TRUYỀN ĐỘNG T-Đ
22
CHƯƠNG II.
BỘ BIẾN ĐỔI CHỈNH LƯU TIRISTOR
Các bộ biến đổi điện áp và dòng điện
Trong các ngành công nghiệp thiết bị máy móc sử dụng năng lượng điện dưới
những dạng khác nhau. Trong khuôn khổ bản đồ án này chỉ chình bày các kỹ thuật
biến đổi các dạng điện năng. Biến năng lượng điện xoay chiều công nghiệp hay
của máy phát điện xoay chiều sẵn có thành những năng lượng điện một chiều
muốn có bằng phương pháp chỉnh lưu.
Dạng biến đổi này được dùng rộng rãi nhất trong các dạng biến đổi năng lượng
điện
Ngoài ra trong thực tế người ta còn sử dụng các quá trình biến đổi năng lượng
điện khác như.
- Kỹ thuật nghịch lưu.
- Kỹ thuật biến tần.
Trong các hệ truyển động 1 chiều. Nguồn cung cấp thường là các bộ biến
đồi (BBĐ) chỉnh lưu điều khiển. Việc chọn được BBĐ phù hợp với yêu cầu của
công nghệ và tối ưu về kinh tế là một việc quan trọng. Vì vậy trong chương này ta
sẽ phân tích về chỉnh lưu Tiristor để chọn lựa được sơ đồ phù hợp và thiết kế
mạch điều khiển nó.
I./ KHÁI NIỆM CHUNG.
Bộ chỉnh lưu liên hệ nguồn xoay chiều với tải một chiều, nghĩa là đổi điện áp
xoay chiều của nguồn thành điện áp một chiều trên phụ tải.
Điện áp một chiều trên tải không được lý tưởng như điện áp của ắc quy mà có
chứa các thành phần xoay chiều cùng với một chiều.
Đầu ra của các sơ đồ chỉnh lưu được cọi là một chiều nhưng thực sự là điện áp
đập mạch. Trị số điện áp một chiều, hiệu áp suất ảnh hưởng của chúng do nguồn
xoay chiều rất khác nhau.
Bộ biến đổi Tiristor với chuyển mạch tự nhiên và có điện áp (dòng điện) ra
là 1 chiều là các thiết bị biến nguồn điện xoay chiều 3 pha thành điện áp 1 chiều
điều khiển được.
Hoạt động của mạch do nguồn điện xoay chiều quyết định vì nhờ đó mà có
thể thực hiện được chuyển mạch dòng điện giữa các phần tử lực.
Việc phân loại chỉnh lưu phụ thuộc nhiều yếu tố:
Các bộ chỉnh lưu được chia làm hai loại: chỉnh lưu nửa chu kỳ còn gọi là chỉnh
lưu nửa sóng; chỉnh lưu hai nửa chu kỳ còn gọi là chỉnh lưu toàn sóng
- Theo kiểu van sử dụng có: Chỉnh lưu không điều khiển, chỉnh lưu có điều
khiển, chỉnh lưu bán điều khiển.
- Theo sơ đồ đấu có: Sơ đồ hình tia là khi chỉ có một nhóm van đấu chung
(Anốt) Katốt; Sơ đồ hình cầu là khi dùng kết hợp cả hai nhóm trên.
- Theo số pha nguồn có: Sơ đồ 1 pha, sơ đồ 3 pha, sơ đồ 6 pha,... m pha.
- Như vậy sơ đồ cầu sẽ có số van bằng 2 lần số van của sơ đồ hình tia khi có
cùng số pha nguồn.
THIẾT KẾ HỆ TRUYỀN ĐỘNG T-Đ
23
Dạng được áp dụng ra tải sẽ được xác định nhờ luật mở van đối với các
nhóm anốt (Katốt) chung. Đối với chỉnh lưu điều khiển vì dùng van Tiristor cho
nên phải căn cứ vào góc mở X và tính chất của tải. Nhìn chung dạng điện áp ra tải
là nhấp nhô không bằng phẳng. Độ đập mạch sẽ nhỏ đi khi số lần đập mạch tăng.
Nếu gọi số lần đập mạch trong một chu kỳ điện áp nguồn là P và số pha của
nguồn cấp là m ta có nhận xét:
- Sơ đồ tia có: P = m.
- Sơ đồ cầu có: P = 2m.
- Dùng sơ đồ cầu 2 pha có P = m vì điện áp tổng cộng 2 pha là hình sin
cùng tần số.
Như vậy để nhận được dạng điện áp ra tải có tốc độ đập mạch thấp thì sơ
đồ chỉnh lưu 3 pha là tốt hơn.
- Sử dụng điện áp 3fa rất thuận tiện vì có công suất ra tải lớn.
- Dạng điện áp và dùng điện ra tải ít đập mạch, do đó vấn đề lọc sẽ đơn giản, rẻ
tiền
Tuy nhiên mỗi sơ đồ đều có các ưu nhược điểm riêng. Để chọn được sơ đồ
chỉnh lưu thích hợp ta xem xét từng loại sơ đồ chỉnh lưu.
II./ CÁC BỘ CHỈNH LƯU DÙNG TRONG HỆ T - Đ.
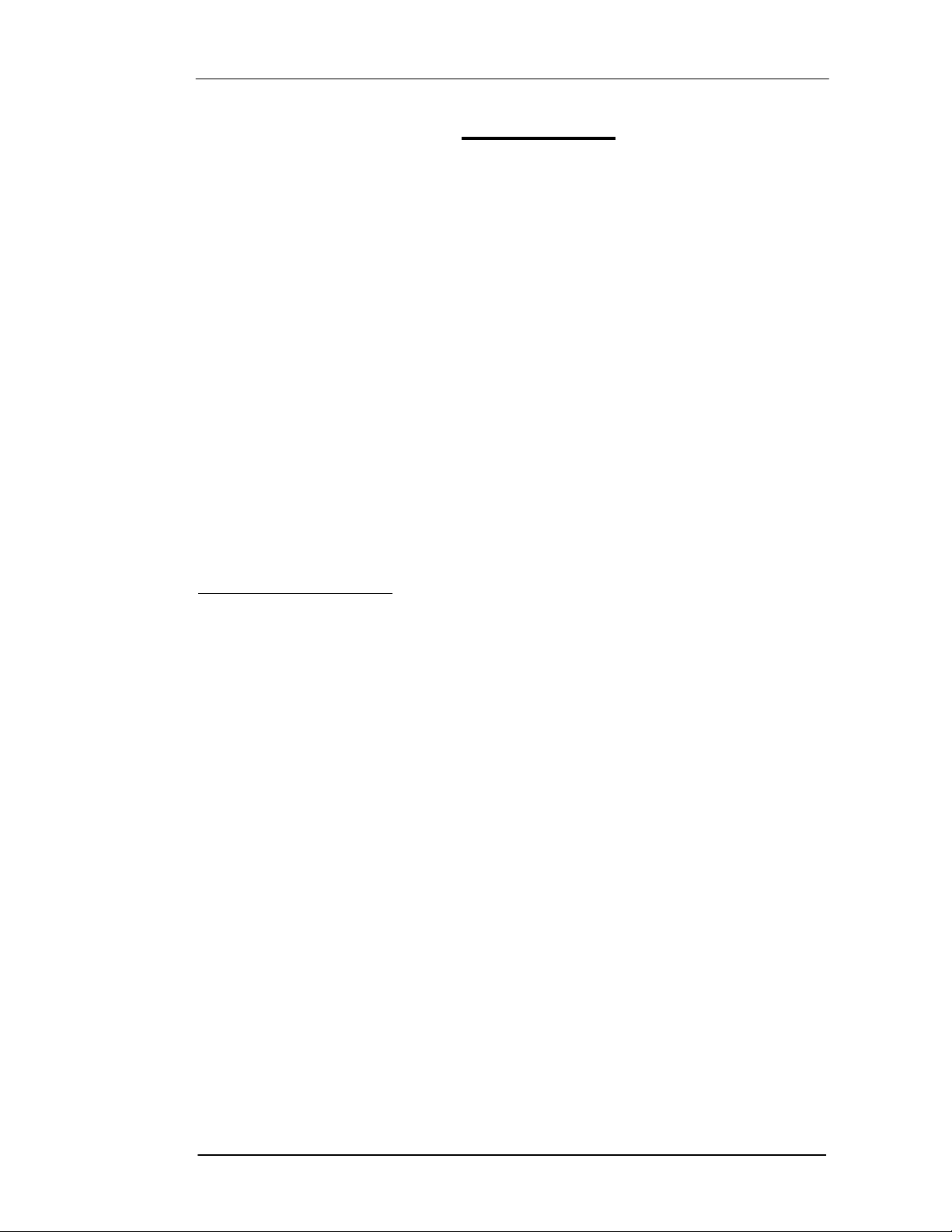
1. Chỉnh lưu một pha hai nửa chu kỳ
Hình II – 1: Chỉnh lưu một pha hai nửa chu kỳ
Tải
T
1
T
4
T
2
T
3
Ig1 Ig3
Ig32
Ig4
I
1
I
3
I
2
I4
UT1
UU
U1
U2
N
Tải điện
cảm
UL
THIẾT KẾ HỆ TRUYỀN ĐỘNG T-Đ
24
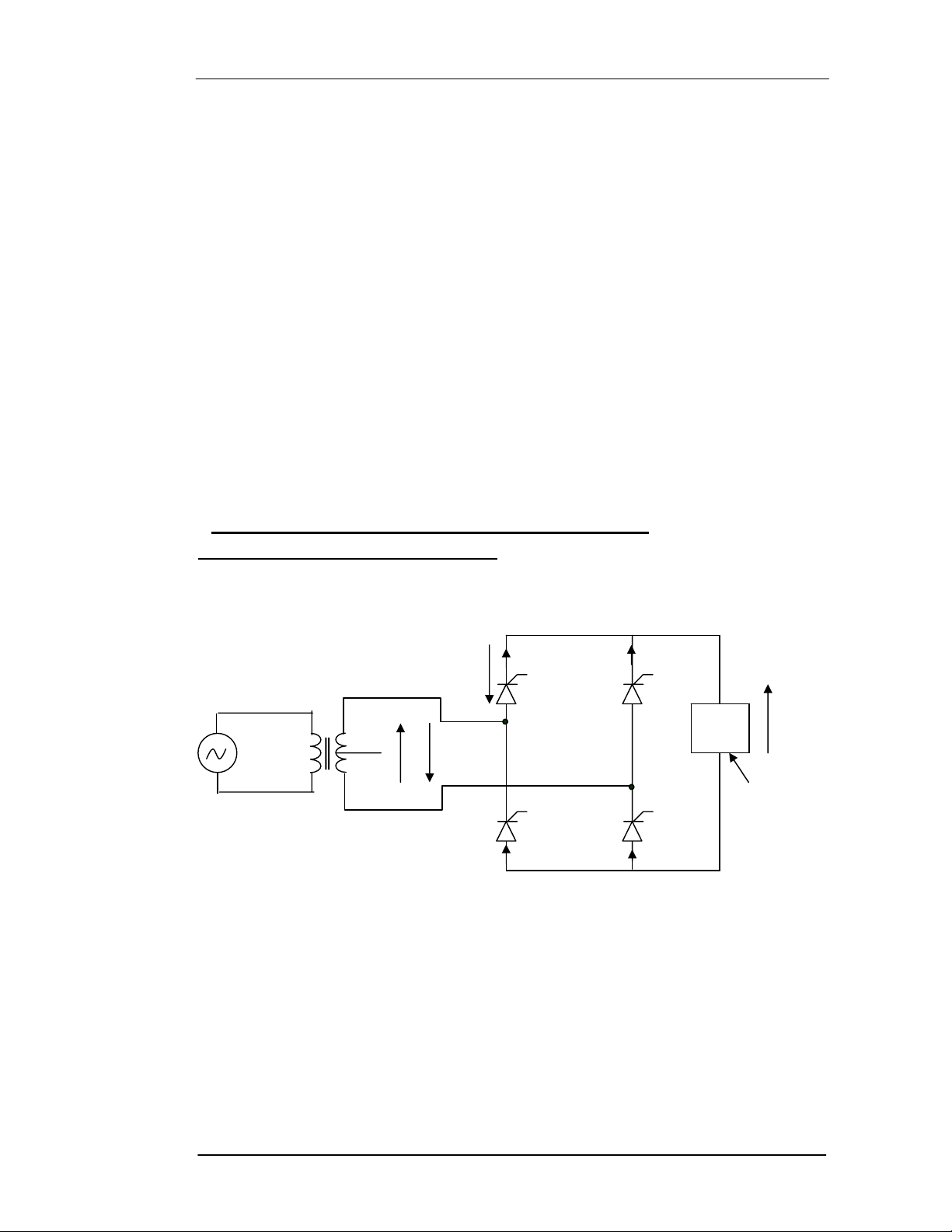
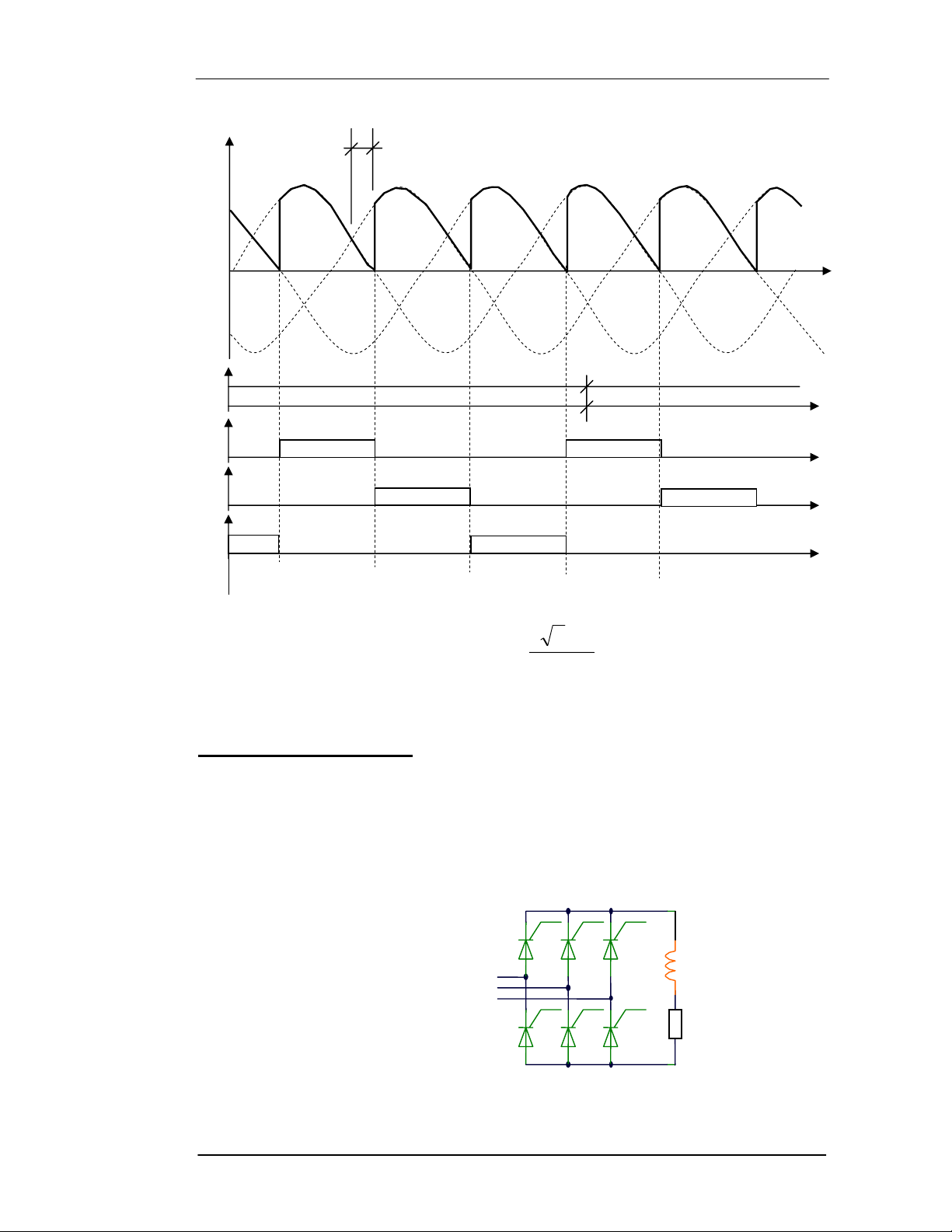
Hình 1I-1: Sơ đồ chỉnh lưu cầu 1 pha có điều khiển và các dạng sóng
Bộ chỉnh lưu điều khiển biểu diễn trên hình II-4 dùng toàn tiristor. Trước
lúc mồi các tiristor chưa dẫn điện và để có được dòng điện trên tải cần mở đồng
thời tiristor I1 và T2, tương tự sẽ mở đồng thời tiristor T3 và T4 ở nửa chu kỳ sau.
Phải dùng một mạch mồi đồng thời cho tiristor T1 và T2. Máy biến áp xung có
hai đầu ra cách ly, vì catốt của các tiristor có điện thế khác nhau trong mạch công
suất. Điện áp tải cũng giống như điện áp mô tả ở bộ chỉnh lưu hai nửa chu kỳ, trị
số trung bình là:
U1 U2
Uy
Ux
UL
α
α
Umax Điện áp trên của tải so với điểm
trung bình
Điện áp dưới của tải so với
điểm trung bình
Các xung môi trên cực điều
khiển
Điện áp tải
Vtb
θ
=
ω
t
Dòng điện tải
Dòng điện qua các
tirista
Dòng điện
nguồn
Vmax = Đỉnh điện áp thuận
Ux
0
Vmax = Đỉnh điện áp ngược
0
0
0
0
0
0
0
t
t
t
t
t
t
t
THIẾT KẾ HỆ TRUYỀN ĐỘNG T-Đ
25
α
π
θθ
π
απ
α
cos
2
sin
1max
max
U
dUUtb == ∫
+
trừ đi hai điện áp rơi trên tiristor.
Phương trình trên không dùng được nếu dòng điện tải là không liên tục
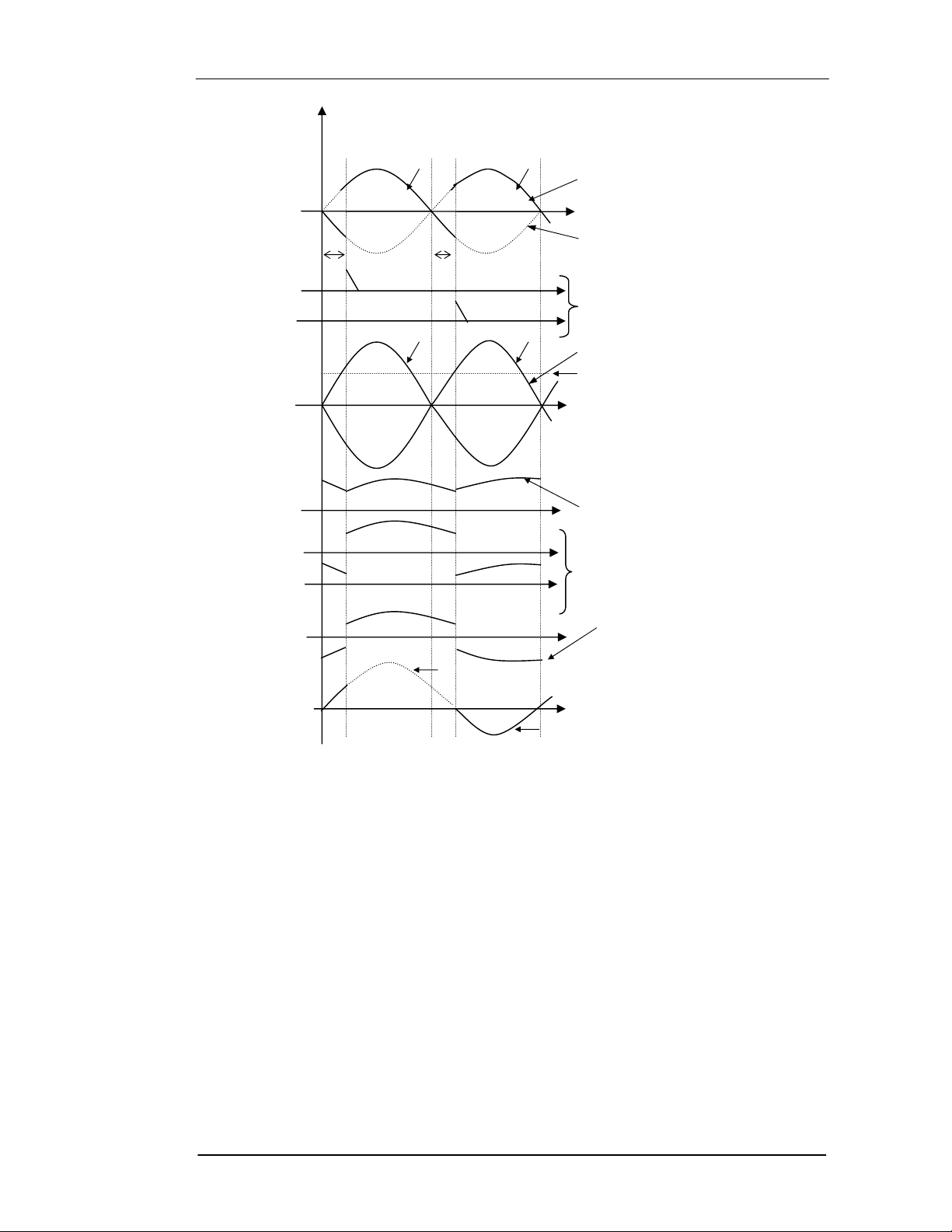
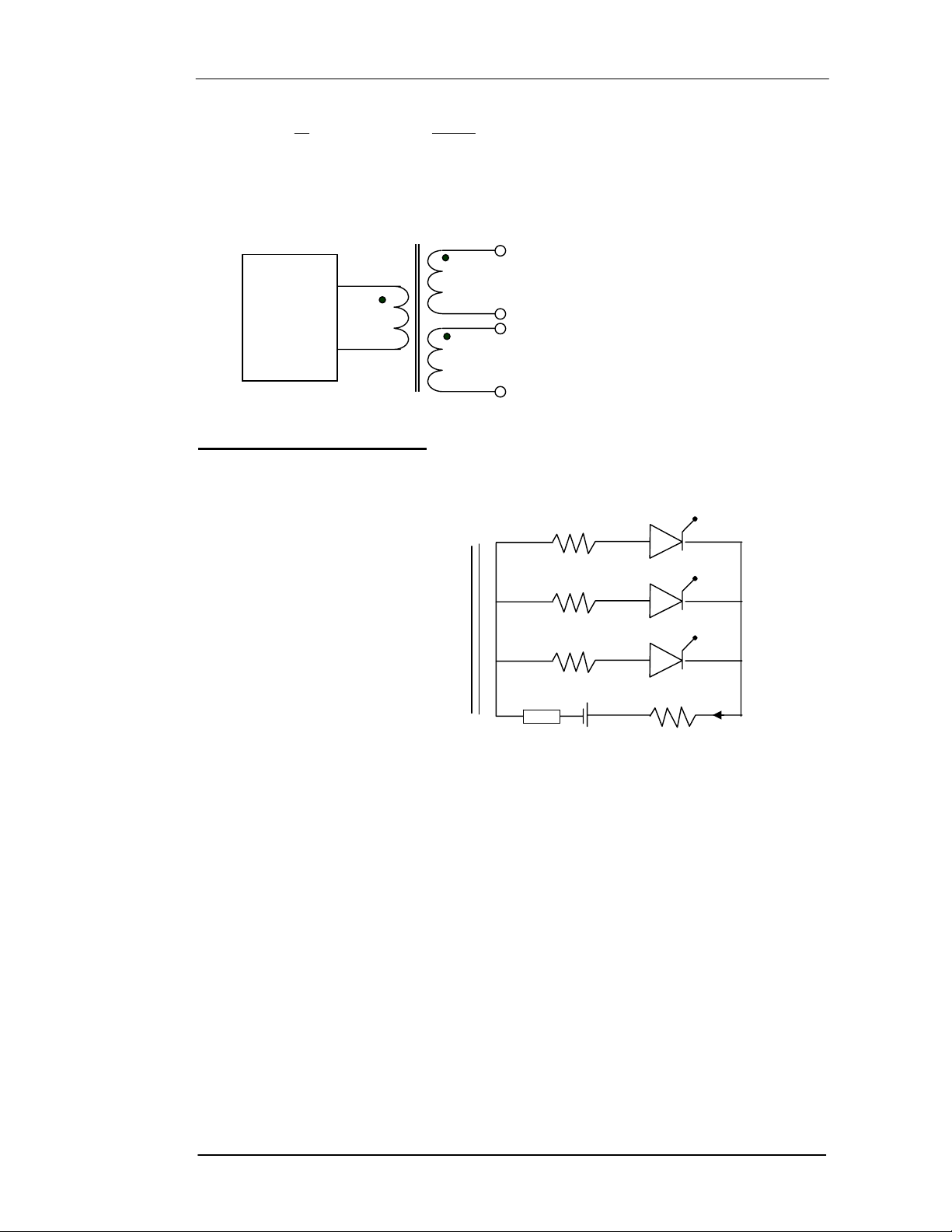
Hình 11-2: Sơ đồ nối đầu ra của mạch điều khiển
2- Sơ đồ chỉnh lưu tia 3 pha.
Mạch
mới
Cực điều khiển
đèn tiristor 1
Catốt
Cực điều khiển
đèn tiristor
Catốt
R E L
Va
T
1 G1
Vb T2 G2
Vc T3 G3
Id
THIẾT KẾ HỆ TRUYỀN ĐỘNG T-Đ
26
Đối với sơ đồ tia 3 pha: Giá trị trung bình điện áp tải:
Ud = α
πCos
2
U63 2
dòng trung bình qua van: Iv = Id/3, số lần đập mạch của điện áp chỉnh lưu :
P = 3; công suất máy biến áp: Sba = 1,34Pd.
2-Bộ chỉnh lưu cầu 3 pha :
Ở mạch này người thiết kế sử dụng bộ chỉnh lưu cầu 3 pha có điều khiển được
mắc theo sơ đồ cầu 3 pha đối xứng được biểu diễn ở (hình III-3) bao gồm 6
thyristor được chia thành 2 nhóm.
+ Nhóm anôt chung gồm T2, T4, T6.
+ Nhóm catôt chung gồm T1, T3, T5.
T1 T3 T5
T4 T6 T2
ea
eb
ec
L
R
Id
Id
IT3
IT2
IT
1
Ud
θ
α
θ
θ
θ
θ
0
0
0
0
0
![Động cơ điện không đồng bộ 3 pha roto lồng sốc: Đặc tính kỹ thuật [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2017/20170305/nvtamanhs11/135x160/3841488728348.jpg)






![Tổng quan về máy phát điện xoay chiều [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20131213/lethanhvinh1992/135x160/1161386937357.jpg)
![Động cơ điện xoay chiều đồng bộ 3 pha - Chương 9: [Nội dung chi tiết/Hướng dẫn/Tìm hiểu]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20131023/080893/135x160/2791382466320.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)