TỔNG QUAN TÌNH HÌNH NGHIÊN CỨU MẠNG NƠ RON CHO
RÔBỐT THÔNG MINH
Tạ -Hồng-Kỳ . Phòng Cơ điện tử , Viện Cơ học , 264 Đội cấn ,Hà nội .
Email: tahongky@yahoo.com
Tóm tắt: Chương trình nghiên cứu Mạng nơ ron trên thế giới . Tình hình
nghiên cứu trong nước .Một số công trình nghiên cứư mạng nơ ron đã công
bố ở nước ngoài.
Abstract: Neural Network Projects in the World . Rerearchs of Neural
network in Vietnam Researchs of Neural Network in the world..
I.GIOI THIEU
Ngµy nay trªn thÕ giíi kh«ng cã
c«ng nghÖ nµo ph¸t triÓn nhanh vµ
m¹nh nhu kü thuËt robot . Nguêi ta dù
®o¸n ®Õn gi÷a thÕ kû 21 , Robot sÏ trë
thµnh mét trong nh÷ng ®éng lùc quan
träng nhÊt cña sù ph¸t triÓn kü thuËt.
M¹ng n¬ ron lµ ch×a kho¸ c«ng nghÖ
cña thÕ kû 21 trong lÜnh vùc trao ®æi vµ
xö lý th«ng tin. §ã lµ mét hÖ thèng bao
gåm mét sè luîng lín nh÷ng kiÓu ®Æc
biÖt cña nh÷ng bé xö lý phi tuyÕn gäi lµ
n¬ ron.
II. CHUONG TRINH NGHIEN CUU
MANG NO RON TOAN CAU:
Nghiªn cøu vÒ m¹ng N¬ ron ®· ®u-
îc quan t©m tõ nh÷ng n¨m 40 cña thÕ
kû 20 . Kho¶ng nh÷ng n¨m 90 N¬ ron
®uîc ®Æc biÖt chó ý bëi kh¶ n¨ng øng
dông réng lín cña nã .
Chu¬ng tr×nh nghiªn cøu vÒ n¬ ron
tËp chung nghiªn cøu ë Mü ( 50 tæ
chøc trong c¸c viÖn nghiªn cøu vµ tru-
êng ®¹i häc , riªng California ®· cã 15
tæ chøc nghiªn cøu ) . ¥ Anh cã 20 tæ
chøc , §øc (7) , NhËt (7), Ph¸p (6),
Thôy sü(4) , Thôy ®iÓn (4) , Hµ lan (4) ,
Australia (3) , Ytalia (3) , Cana®a (3),
Nga(1) , Czech (1) , Balan(1) ,
Hungary(1), Hµn quèc (1) , Singapor
(1) , Hong kong (1)v.v…¥ Mü , t¹i
bang California , Truêng §¹i häc
California San diego cã Chu¬ng tr×nh
tÝnh to¸n vµ HÖ thèng N¬ ron cña
Caltech, ViÖn tÝnh to¸n N¬ron, Nhãm
nghiªn cøu khoa häc M¸y tÝnh NhËn
thøc , Trung t©m nghiªn cøu Ng«n ng÷
, Phßng thÝ nghiÖm Kü thuËt N¬
ron , Trung t©m Sloan Sinh häc N¬ ron
Lý thuyÕt . §¹i häc California Santa
Cruz cã Nhãm M¸y D¹y häc , , Nhãm
Sinh häc tÝnh to¸n . §ai häc Nam
California cã Phßng thÝ nghiÖm TÝnh
to¸n N¬ ron . §¹i häc Stanford cã
nhãm LËp tr×nh Gen . ¥ Carlsbad cã
§éng lùc häc N¬ ron øng dông . ¥
Moffett Field cã Nhãm Kü thuËt N¬ ron
NASA .
Bang Massachusetts , cã Trung t©m
D¹y häc TÝnh to¸n vµ Sinh häc t¹i ViÖn
C«ng nghÖ Massachusetts -MIT , Nhãm
tÝnh to¸n ë khoa N·o vµ khoa häc NhËn
thøc thuéc MIT , NeuoDyne Ins,
Cambridge.
Bang Washington cã Phßng ThÝ nghiÖm
¦ng dông , TrÝ tuÖ TÝnh to¸n thuéc §¹i
häc Washington , Nhãm Nghiªn cøu N¬
ron t¹i Phßng thÝ nghiÖm Xö lý Th«ng tin
. Nhãm nghiªn cøu N¬ ron thuéc Phßng
thÝ nghiÖm Pacific Northwest t¹i
Washington.
Bang Texas cã Phßng thÝ nghiÖm Kü
thuËt N¬ ron R&D thuéc §¹i häc Texas
ë Austin .Phßng thÝ nghiÖm TÝnh to¸n
¦ng dông t¹i ®¹i häc Kü thuËt Texas .
Bang Pensylvania cã Trung t©m C¬ së
N¬ ron cña NhËn thøc t¹i Carnegie
Melon .
Bang Ohio cã Phßng ThÝ nghiÖm HÖ
thèng N¬ ron Nh©n t¹o thuéc §ai häc
Cincinnati.
Bang New Mexico cã Nhãm TÝnh
to¸n ThÝch nghi thuéc §¹i häc New
Mexico. Nhãm TÝnh to¸n ThÝch nghi Phi
tuyÕn thuéc Phßng thÝ nghiÖm Quèc gia
Los Alamos .
Bang New Jersey cã Nhãm Nghiªn
cøu N¬ ron Nh©n t¹o ë ViÖn nghiªn cøu
NEC , Princeton. Nhãm NhËn thøc , TrÝ
tuÖ vµ TÝnh to¸n dùa trªn DNA , ë ViÖn
nghiªn cøu NEC , Princeton v.v…
Anh: cã Trung t©m M¹ng N¬ ron t¹i tr-
uêng Hoµng gia London. Trung t©m
HÖ thèng N¬ ron t¹i §¹i häc Edinburgh.
Nhãm Nghe , Nh×n vµ Robot §¹i häc
Cambridge. Nhãm Nghe , Nh×n vµ HÖ
thèng Th«ng minh §¹i häc
Southhampton.Nhãm Nghiªn cøu TrÝ
tuÖ Nh©n t¹o thuéc §¹i häc
Nottingham. Nhãm nghiªn cøu HÖ
thèng Th«ng minh, khoa Khoa Häc
M¸y tÝnh thuéc §¹i häc London v.v…
NhËt: cã Phßng ThÝ nghiÖm Robot
vµ C¬ -§iÖn tö thuéc §¹i häc Nagoya.
Phßng thÝ nghiÖm Okabe vµ Hirose
thuéc §¹i häc Tokyo . Phßng thÝ
nghiÖm Sinh-§iÖn tö thuéc §¹i häc
Nagoya.Phßng thÝ nghiÖm Nghiªn cøu
Xö lý Th«ng tin Nguêi ë Kyoto v.v…
§øc: cã ViÖn Tin häc N¬ ron ë §¹i
häc Ruhr , Bochum. Nhãm nghiªn cøu
Mê vµ TÝnh to¸n MÒm t¹i §¹i häc
Braunschweig. Nhãm Nhiªn cøu Mê vµ
N¬ ron t¹i §¹i häc C«ng nghÖ
Damstardt. Nhãm Nh×n- M¸y tÝnh vµ
NhËn d¹ng thuéc §¹i häc Bon . Trung
t©m nghiªn cøu TrÝ tuÖ Nh©n t¹o §øc
DFKI thuéc Kaiserlautern . Nhãm
Nghiªn cøu N¬ ron cña GMD FIRST t¹i
Berlin.ViÖn Logic, Tæ hîp vµ HÖ thèng
Suy diÔn t¹i §¹i häc Karlsruhe.
Ph¸p: cã Nhãm nghiªn cøu Tin-Sinh
häc Truêng Cao cÊp ,Pari.Nhãm tÝnh
to¸n N¬ ron thuéc Phßng Tin häc Pari
Nord .Nhãm nghiªn cøu N¬ ron ë
LEIBNIZ, Grenoble. Nhãm nghiªn cøu
Laplace , M« h×nh gÇn ®óng trong
Robot vµ TrÝ tuÖ Nh©n t¹o ë LEIBNIZ,
Grenoble.
Hungary: cã Nhãm Xö lý th«ng tin
N¬ ron thuéc §¹i häc Eotvos Lorand ,
Budapest .
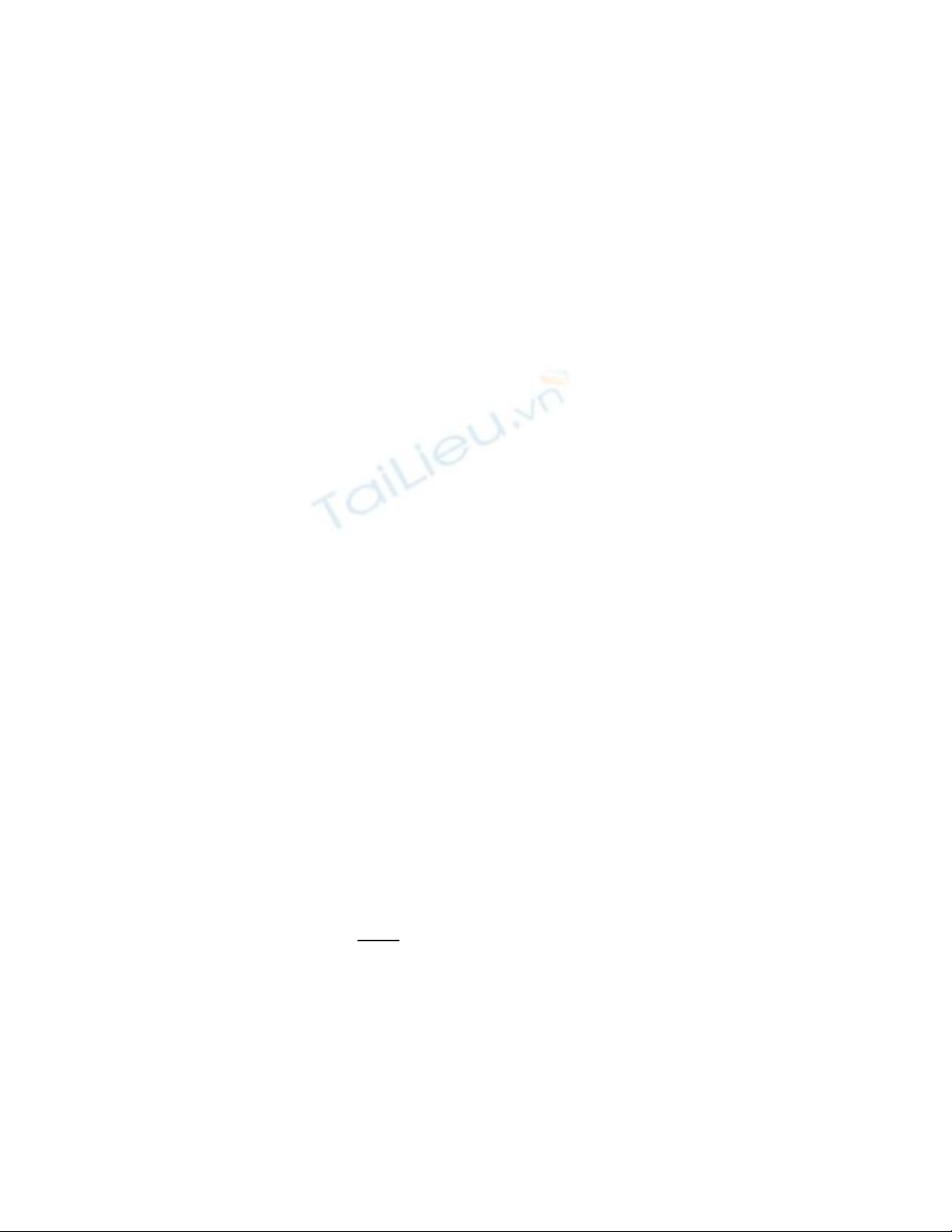
III.MANG PERCEPTRON NHIEU LOP–
MPL
§©y lµ m¹ng N¬ ron thuËn víi nh÷ng tÝn
hiÖu vµo liªn tôc vµ nh÷ng líp bao gåm :
líp tÝn hiÖu vµo , líp tÝn hiÖu ra , líp trung
gian (líp Èn ) . §Æc ®iÒm chÝnh cña m¹ng
perceptron lµ liªn kÕt trùc tiÕp nh÷ng nót
cña nh÷ng líp gièng nhau lµ kh«ng cho
phÐp . §uêng vßng cña nh÷ng líp còng
kh«ng ®uîc phÐp . VÝ dô , khi liªn kÕt nót
tÝn hiÖu vµo víi nót tÝn hiÖu ra ®uêng vßng
cña líp Èn bÞ cÊm .
0
y 1−M
y
Lop ra
lop an
1
Lop an
2
'
0
x
Lop vao
0
x 1−N
x
IV.THUAT TOAN PHAN HOI :
Buíc 1 : §ua ra träng luîng vµ gi¸ trÞ
nguìng b»ng nh÷ng gi¸ trÞ du¬ng nhá .
Buíc 2: §ua ra tÝn hiÖu ®Çu vµo 121 ,...,, −N
xxx
và giá trị đầu ra mong muốn 121 ,..., −M
ddd .
NÕu m¹ng n¬ ron ®uîc sö dông nhu mét bé
ph©n lo¹i , sau ®ã ®Æt tÊt c¶ i
dtíi kh«ng , trõ
mét
c¸i lµ biÓu hiÖn lo¹i trong ®ã tÝn hiÖu
gi¸ trÞ 1.
Buíc 3:
TÝnh to¸n gi¸ trÞ thùc , sö dông hµm
sigmoid vµ thùc hiÖn tÝnh to¸n
theo s¬ ®å
Buoc 4:
CËp nhËt träng luîng ban ®Çu tõ nót tÝn hiÖu ra
vµ thùc hiÖn ph¶n håi sö dông c«ng thøc :
Hinh.1
–
MANG NO RON 3 LOP

,
)()1( xjijij xtwtw
ηδ
+=+
ë ®©y :
w ij lµ träng luîng synap cña liªnkÕt nót i
víi nót j cña líp tieptheo ë thêi gian t .
x '
i tÝn hiÖu ra cña nót i ( hoÆc tÝn
hiÖu vµo i cña m¹ng n¬ ron ) .
η
hÖ sè thu nhËn ( hÖ sè tØ sè
d¹y häc )
j
δ
sè h¹ng sai sè cho nót x¸c ®Þnh
nhu :
j
δ
=y j (1-y j)(d i-yi)
víi
y j lµ tÝn hiÖu thùc
d
j
lµ tÝn hiÖu ®Çu ra mong muèn .
NÕu nót j lµ nót cña líp Èn , khi ®ã :
j
δ
= x '
j(1-x '
j)∑
k
k
δ
wjk
ë ®©y , k më réng cho tÊt c¶ c¸c nót cña
nh÷ng líp truíc . Nguìng cña nh÷ng nót
bªn trong ®uîc thÝch øng tu¬ng tù nhu vËy ,
gi¶ sö chóng lµ träng luîng liªn kÕt trong
nh÷ng tÝn hiÖu vµo cña nh÷ng gi¸ trÞ kh«ng
®æi . Cho tèc ®é héi tô , mét c¸i cã thÓ
céng thªm sè h¹ng nhu :wij (t}= w ij +
j
ηδ
x'
i+
α
[ w ij (t) - wij (t-1)] , 0 <
α
< 1
Buíc 5 : LÆp l¹i tõ buíc 2 .
V. MOT SO CONG TRINH MANG NO
RON DA CONG BO O NUOC NGOAI:
§a sè c¸c nhµ nghiªn cøu c¸c HÖ
thèng Th«ng minh chÊp nhËn r»ng : TrÝ
tuÖ TÝnh to¸n (Computational
Intelligence) do Héi ®ång M¹ng N¬ ron
ThÕ giíi ®ua ra vµo n¨m 1991 vµ TÝnh
to¸n mÒm (Soft computing) do Lofti A
Zadeh , gi¸o su ®¹i häc California
Berkeley ®ua ra n¨m 1990 lµ ®ång
nghÜa vµ ®uîc sö dông thay thÕ lÉn
nhau . TrÝ tuÖ TÝnh to¸n ®uîc chÊp
nhËn lµ mét thuËt ng÷ ®Ó biÓu diÔn c¸c
kü thuËt cho viÖc ra quyÕt ®Þnh dùa trªn
viÖc xö lý th«ng tin kh«ng ch¾c ch¾n .
VÒ c¬ b¶n , TrÝ tuÖ TÝnh to¸n bao gåm
Logic Mê , M¹nh N¬ ron , ThuËt gi¶i Di
truyÒn , LËp luËn X¸c xuÊt ,c¸c Phu¬ng
ph¸p Häc , Lý thuyÕt Hçn ®én , c¸c HÖ
chuyªn gia . Mét ®iÒu quan träng cÇn
nhÊn m¹nh lµ TrÝ tuÖ Nh©n t¹o kh«ng
chØ lµ mét t©p hîp c¸c phu¬ng ph¸p
luËn cho lËp luËn dùa trªn th«ng tin
kh«ng ch¾c ch¾n mµ lµ sù liªn kÕt c¸c
phu¬ng ph¸p trong ®ã mçi phu¬ng
ph¸p ®Òu cã lîi thÕ riªng ®Ó tiÕn tíi ®¹t
môc tiªu chung . Bëi vËy , c¸c thµnh
phÇn cña TrÝ tuÖ TÝnh to¸n ph¶i ®uîc
xem nhu c¸c phÇn bæ xung cho nhau
chø kh«ng ph¶i tu¬ng ®u¬ng . TÊt c¶
c¸c kü thuËt ®ã nh»m môc ®Ých ®ua ra
mét d¹ng “ M¸y Th«ng minh “nµo ®ã
mµ nã cã thÓ b¾t chuíc sù suy nghÜ
cña con nguêi trong viÖc ra quyÕt ®Þnh
. §éng c¬ chñ yÕu cho viÖc sö dông TrÝ
tuÖ TÝnh to¸n lµ khai th¸c kh¶ n¨ng xö
lý th«ng tin kh«ng chÝnh x¸c , kh«ng
ch¾c ch¾n , chØ ®óng mét phÇn vµ kÕt
qu¶ ®¹t ®uîc lµ tÝnh dÔ ¸p dông ,sù
n¨ng ®éng vµ c¸c gi¶i ph¸p chi phÝ
thÊp cho c¸c vÊn ®Ò phøc t¹p . §©y
còng lµ môc tiªu do gi¸o su Lofti A
Zadeh , §¹i häc California Berkeley (
nguêi s¸ng t¹o Lý thuyÕt TËp Mê 1965
dua ra vµo ®Çu nh÷ng n¨m 1990 ®èi
víi sù ph¸t triÓn cña c¸c HÖ Th«ng
minh .
Hai d¹ng cña M¹ng N¬ ron thuêng
®uîc sö dông trong Kü thuËt Robot lµ
M¹ng Hopfield vµ M¹ng Perceptron
nhiÒu líp do Hopfied ®a ra 1982,
Kohonen 1984, Rumelhart 1986.
Nh÷ng m¹ng kh¸c bao gåm M¹ng
C¹nh tranh & Hîp t¸c do Amari &Arbib
nghiªn cøu n¨m 1977 vµ M¹ng Thuëng
ph¹t do A.G.Barto&C.W.Anderson
1983.
HÖ thèng Robot bao gåm 3 hÖ thèng
phô lµ : HÖ thèng truyÒn ®éng , HÖ
thèng NhËn d¹ng vµ HÖ thèng §iÒu
khiÓn . Nh÷ng vÊn ®Ò chÝnh cña §iÒu
khiÓn Robot bao gåm §éng häc , §éng
lùc häc , LËp kÕ ho¹ch ®uêng ®i (ThiÕt
lËp quÜ ®¹o ) , §iÒu khiÓn , C¶m biÕn ,
LËp tr×nh vµ TrÝ tuÖ (Th«ng minh).
M¹ng N¬ ron cã thÓ gi¶m tæ hîp tÝnh
to¸n vµ gi¶i nh÷ng bµi to¸n robot ®uîc
®ua ra “yÕu” . Lêi gi¶i gi¶i tÝch cña ®éng
häc nguîc lµm chÝnh x¸c kÕt qu¶ sè ,

trong khi lêi gi¶i M¹ng n¬ ron nãi chung
kh«ng lµm chÝnh x¸c.C«ng viÖc ph¸t
triÓn §éng häc nguîc N¬ ron ®uîc
T.Iberall ph¸t triÓn n¨m 1987, A.Guez
n¨m1988.
Trong §éng lùc häc Robot N¬ ron ,
M.Kawato,Furukawa,Suzuki ph¸t triÓn
n¨m 1987. Y.Uno &M.Isobe 1988.
S.G.Tzafestas1986, M.Kawato
,Y.Maeda,Y.Uno &Suzuki 1990.
M¹ng N¬ ron sö dông nh»m thiÕt lËp
quÜ ®¹o ®uîc K.Tsutsumi 1988,
H.liu1988, R.Ecmiller 1987.
Bµi to¸n lËp quÜ ®¹o tr¸nh vËt c¶n sö
dông M¹ng Hopfield ®uîc
H.matsumoto& K.Tsutsumi ph¸t triÓn .
Truêng hîp Robot Di ®éng , ThiÕt lËp
quÜ ®¹o víi M¹ng N¬ ron ®uîc nghiªn
cøu bëi V.Seshadri1988.¥ ®©y M¹ng
N¬ ron cè g¾ng cùc tiÓu ho¸ ®é dµi ®u-
êng ®i . Nick Vallidis ®· nghiªn cøu
®iÒu khiÓn Hexapod di ®éng b»ng
m¹ng n¬ ron , 2000. L.M.Reyneri,
M.Chiaberge Khoa ®iÖn tö , §¹i häc
B¸ch khoa Torino- Italy nghiªn cøu
phÇn cøng-M¹ng Mê-N¬ ron ®iÒu khiÓn
Hexapod Di ®éng, 1993-2000 .
§iÒu khiÓn Robot b»ng M¹ng N¬ ron
®uîc gäi lµ §iÒu khiÓn khíp b»ng m«
h×nh tiÓu n·o CMAC do Albus 1975 –
1979. Gi¸o s F.L.Lewis ,ViÖn nghiªn
cøu Robot vµ Tù ®éng ho¸, §¹i häc
Texas –Arlington USA ®· øng dông
CMAC ®Ó ®iÒu khiÓn hÖ ®éng lùc phi
tuyÕn, 1997.
NhËn d¹ng hÖ ®éng lùc phi tuyÕn sö
dông m¹ng n¬ ron ®uîc
S.J.Jagannathan, Liªn hîp Ph©n tÝch
Tù ®éng ho¸, USA nghiªn cøu n¨m
1996.
Y.Pao&D.Sobasic 1987 thùc hiÖn hÖ
thèng ®iÒu khiÓn vÞ trÝ robot hai bËc tù
do sö dông M¹ng N¬ ron Perceptron .
A.Guez sö dông m« h×nh thÝch nghi
(MRAC). W.T. Miler sö dông kü thuËt
CMAC trong liªn kÕt víi phu¬ng ph¸p
®iÒu khiÓn m« men. R.Elsley thùc hiÖn
®iÒu khiÓn Jacobi nguîc,sö dông M¹ng
Perceptron nhiÒu líp.
M¹ng N¬ ron §uîc sö dông trong c¶m
biÕn vµ ®iÒu khiÓn Robot nhiÒu líp ,
liªn tôc bëi R.Esley , &Y.Pati 1988.
§iÒu khiÓn thÝch nghi hÖ ®éng lùc häc
phi tuyÕn sö dông m¹ng n¬ ron ®uîc
gi¸o su A.M.Annaswamy , Phßng thÝ
nghiÖm §iÒu khiÓn thÝch nghi - Khoa
ChÕ t¹o M¸y – ViÖn C«ng nghÖ
Massachusetts –MIT nghiªn cøu, 1997.
¦ng dông M¹ng N¬ ron ®iÒu khiÓn
nguîc theo vÕt ®uîc gi¸o su K. S.
Narendra, Trung t©m Khoa häc HÖ
thèng , §¹i häc Yale,USA nghiªn cøu,
1999.
Gi¸o su Vukobratovic , Trung t©m
Robot, ViÖn Mikhailo Pupin , Nam tu
(cò ) , phã chñ tÞch ViÖn Hµn l©m Khoa
häc, ®· nghiªn cøu ph©n lo¹i m« h×nh
®éng lùc häc m«i truêng trªn c¬ së N¬
ron ®Ó ®iÒu khiÓn robot ,1998.
Bé ®iÒu khiÓn Mê-N¬ ron ®Ó dÉn hu-
íng Robot Di ®éng vµ hé tèng ®éi robot
®uîc gi¸o su M.M.Trivedi Khoa Kü
thuËt §iÖn vµ M¸y tÝnh , §¹i häc
California San Diego ,USA nghiªn
cøu,1998.
Gi¸o su, ViÖn sÜ, V¸mos Tibor,
nguyªn ViÖn truëng ViÖn Tin häc vµ Tù
®éng ho¸- Hungary, - nguyªn chñ tÞch
Héi M¸y tÝnh Neyman J¸nos (Von
Neyman), nguyªn chñ tÞch Héi §iÒu
khiÓn Tù ®éng Quèc tÕ IFAC ®· nghiªn
cøu kü thuËt NhËn d¹ng –TrÝ tuÖ Nh©n
t¹o cho robot.
Gi¸o su ,ViÖn sÜ Hyungsuck Cho ,
Khoa ChÕ t¹o m¸y ,ViÖn Khoa häc
&C«ng nghÖ Cao cÊp Hµn quèc-
KAIST, H·ng ThÐp vµ Kim lo¹i
Pohang-POSCO, ViÖn truëng ViÖn
§iÒu khiÓn ,Tù ®éng ho¸ vµ Kü thuËt
HÖ thèng, ®· nghiªn cøu ®iÒu khiÓn vµ
c¶m biÕn nano cho robot ,2001.
Gi¸o su T.Fukuda , Khoa Kü thuËt Vi
HÖ thèng,Trung t©m Hîp t¸c Khoa häc
&C«ng nghÖ CÊp cao, §¹i häc Nagoya-
NhËt b¶n, nguyªn Chñ tÞch Héi Robot
vµ Tù ®éng hãa Quèc tÕ , Chñ tÞch Héi
®ång C«ng nghÖ Nano Quèc tÕ, ®·
nghiªn cøu M¹ng Mê-N¬ ron -ThuËt
gi¶i AND ®Ó ®iÒu khiÓn robot, 2000.
C«ng nghÖ Nano ®ang më ra nh÷ng
triÓn väng to lín. ViÖc chÕ t¹o ra nh÷ng
robot nhá cì Nano 10-9mm ®ßi hái
nh÷ng nghiªn cøu míi vÒ c¬ së lý
thuyÕt còng nhu c«ng nghÖ. Gi¸o su
Toshio Fukuda , ®Æc biÖt nhÊn m¹nh

tÇm quan träng cña Robot Micro-Nano
trong Kü thuËt Robot vµ Tù ®éng ho¸
tu¬ng lai.
Gi¸o su,ViÖn sÜ G.M.Edelman ,gi¶i
thuëng Nobel, ViÖn truëng ViÖn Khoa
häc N¬ ron - USA ,Chñ tÞch Héi nghiªn
cøu Khoa häc N¬ ron Quèc tÕ, ®· m«
pháng N¬ ron hÖ thèng Nghe-Nh×n cña
loµi chim ®Ó ®iÒu khiÓn robot ,1999.
Gi¸o su ®· kh¼ng ®Þnh, viÖc nghiªn cøu
nµy ®Æc biÖt quan träng duíi ¸nh s¸ng
cña lý thuyÕt N·o HiÖn ®¹i, nhÊn m¹nh
tÇm quan träng cña m«i truêng vµ thùc
nghiÖm Motor-C¶m biÕn N¬ ron . Sù
hiÓu biÕt nh÷ng nguyªn t¾c c¬ b¶n cña
n·o sÏ cã ¶nh huëng m¹nh mÏ ®Õn
thiÕt kÕ HÖ thèng Nh©n t¹o ho¹t ®éng
trong thÕ giíi thùc .Chóng ta tin tuëng
r»ng nh÷ng nghiªn cøu m« h×nh n¬ ron
tæng hîp sÏ tham gia mét c¸ch cã ý
nghÜa bëi sù thiÕt lËp mèi liªn hÖ trùc
tiÕp gi÷a khoa häc Tù nhiªn vµ Khoa
häc Kü thuËt, ®ua ra tu tuëng míi trong
lÜnh vùc Robot vµ TrÝ tuÖ Nh©n t¹o.
VI.TINH HINH NGHIEN CUU MANG
NO RON TRONG NUOC
¥ ViÖt nam b¾t ®Çu nghiªn cøu N¬
ron tõ n¨m 1992 t¹i ViÖn C¬ häc vµ
ViÖn Tin häc trong khu«n khæ ®Ò tµi
cÊp Nhµ nuíc KC-02 §iÒu khiÓn thêi
gian thùc .
HiÖn nay mét sè c¬ së ®ang nghiªn
cøu nhu Trung t©m Tù ®éng ho¸-ViÖn
tin häc , Khoa C«ng nghÖ Th«ng tin -
§HBK.HN , Bé m«n §iÒu khiÓn Tù
®éng §HBK.HN, Häc viÖn Buu chÝnh
ViÔn th«ng , Khoa C«ng nghÖ Th«ng tin
§HBK.HCM ,§¹i häc Giao th«ng VËn
t¶i , ViÖn VËt lý , ViÖn to¸n häc ,
VietcomBank , ViÖn N¨ng luîng
Nguyªn tö , Häc viÖn Kü thuËt Qu©n sù
, §¹i häc Quèc gia - HCM . C«ng t¸c
®µo t¹o ®uîc triÓn khai , ®· cã nh÷ng
luËn ¸n TiÕn sÜ (2) , Th¹c sÜ vµ buíc
®Çu ®uîc gi¶ng d¹y cho sinh viªn . Tuy
nhiªn nh÷ng nghiªn cøu thuêng r¶i r¸c
,cha tËp trung thµnh nh÷ng nhãm
nghiªn cøu m¹nh ®Ó cã thÓ buíc ®Çu
®ua vµo øng dông vµ cã thÓ hîp t¸c víi
c¸c tæ chøc quèc tÕ.
VII.KET LUAN :
Chóng ta tin tuëng r»ng cuèi thÕ kû 21 ,
nh÷ng robot kh«ng chØ th«ng minh, mµ cßn
biÕt xóc c¶m , chóng cã thÓ cã c¸c” yªu
s¸ch” vÒ quyÒn chÝnh trÞ & x· héi . Hµng tû
bé n·o cña con nguêi sÏ ®uîc kÕt nèi vµo
mét M¹ng N¬ ron Toµn cÇu . Con nguêi cã
thÓ n¹p TrÝ tuÖ, thËm chÝ c¶ Nh©n c¸ch vµo
M¹ng N¬ ron Toµn cÇu . GiÊc m¬ sèng l©u
, bÊt tö sÏ trë thµnh hiÖn thùc
VI. TAI LIEU THAM KHAO:
1. Toshio Fukuda &Naoyuki Kubota
Intelligent Robotic Systems.
Pre- print of Japan-USA –Vietnam
Workshop on Rerearch and Education
in System Computation and Control
Engineering,pp.26-
35.RESCCE98Hanoi(5/1998).
2. Mohan M Trivecdi
A Neuro- Fuzzy Controller for Mobile
Robot Navigation and Multirobot
Convoying.
IEEE Transation on System, Man an
Cybernetics-PartB.Cybernetics,
vol.28.No6,December1998.
3. Nick Vallidis.
A Hexapod Robot and Novel
Training Approach for Artificial Neural
Networks.2002
4. Claudio Pernechele, Favio
Bortoletto,Enrico Giro.
Oservatorio Astronomico di Padova-
Italy.
Neural network algorithm controlling
a hexapod platform.2002.
5. S . Jagannathan and F.L. Lewis
Dicsrete –time neural net controller
for a class of nonlinea dynamical
systems. IEEE Transations .on
Automatic Control ,
Vol.41No.11,pp.1693-1699.1996.
6. S . Jaganathan ,S. Commuri and
F.L.Lewis,
Feedback linerization using CMAC
neural network ,
Automatica,Vol.34,No3, March 1998.
7. Gregory Durek & Michael Jenkin
Computational Principles of Mobile
Robots.Cambridge University Press,
2000.




![Mạch nguyên lý Robot tự hành: [Hướng dẫn chi tiết/Kinh nghiệm thiết kế]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20150620/anhkhoa23/135x160/3551434806006.jpg)



















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)