
1
BÀI GIẢNG CHI TIẾT
MÔN MÁY VÔ TUYẾN ĐIỆN HÀNG HẢI 1
PHẦN 1: CÁC HỆ THỐNG VÔ TUYẾN DẪN ĐƯỜNG
Mở đầu
Các hệ thống vô tuyến dẫn đường trong hàng hải dùng để xác định vị trí tàu
và dẫn tàu theo đường đi định sẵn không phụ thuộc vào điều kiện khí tượng thủy
văn. Trên cơ sở có vị trí tàu, nó còn có thể dùng để xác định tốc độ tàu, quãng
đường tàu chạy, vị trí tương đối giữa tàu và các mục tiêu khác…
Cấu trúc chung của một hệ thống vô tuyến dẫn đường bao gồm:
1. Các trạm phát đặt ở các vị trí cố định hoặc di động có tọa độ xác định
trước.
2. Các trạm điều khiển điều khiển hoạt động chung cho toàn bộ hệ thống.
Các trạm này có thể đặt ngay tại các trạm phát hoặc tại các vị trí bất kỳ tùy theo
nhu cầu.
3. Các máy thu chỉ báo đặt trên tàu, căn cứ vào tín hiệu thu được từ trạm
phát, kết hợp với máy tính, hải đồ chuyên dụng, bảng tính chuyên dụng… cho
phép xác định các thông số dẫn đường cần thiết, từ đó tính toán ra vị trí tàu.
Các máy thu hiện đại ngày nay nói chung đều có thể tính toán ngay vị trí tàu
theo kinh vĩ độ cho phép người sử dụng có thể thao tác trực tiếp vị trí trên hải đồ
chạy tàu, tiết kiệm thời gian tính toán nhằm nâng cao hiệu quả dẫn tàu và dành
thời gian để phân tích, xử lý vị trí tàu thu được cho phù hợp với hoàn cảnh dẫn
tàu thực tế, đảm bảo an toàn hàng hải.
Đối với các hệ thống VTDĐ, tin tức không truyền qua các máy phát mà hình
thành trên đường lan truyền sóng. Do khoảng cách từ trạm phát đến các máy thu
khác nhau cũng khác nhau nên tín hiệu các máy thu thu được cũng khác nhau
phụ thuộc vào khoảng cách. Do đó từ tín hiệu thu được ta có thể suy ra các
thông tin về khoảng cách.
Có thể phân loại hệ thống vô tuyến dẫn đường theo nhiều cách. Một trong
các cách chính là phân loại theo số liệu hình học đo được. Theo đó ta có:
- Các hệ thống đo góc,

2
- Các hệ thống đo khoảng cách
- Các hệ thống đo góc và khoảng cách,
- Các hệ thống đo hiệu khoảng cách.
Trước đây các hệ thống đo hiệu khoảng cách được sử dụng rộng rãi. Tùy
thuộc vào cách xác định đường đẳng trị Hyperbol mà ta có các hệ thống đo pha
(như hệ thống Decca, Omega), hệ thống xung (Loran A), hệ thống xung-pha
(Loran C). Ngày nay chỉ còn hệ thống Loran C và Decca là còn hoạt động, các
hệ thống khác đã dừng hoạt động do xuất hiện các hệ thống dẫn đường dùng vệ
tinh ưu việt hơn.
Giới thiệu một số hệ thống vô tuyến dẫn đường trước đây.
1. Vô tuyến định hướng (Direction Finder-DF)
2. Hệ thống Consol
3. Hệ thống Decca
4. Hệ thống Omega
5. Hệ thống Loran-A (Long Range Navigation)
6. Hệ thống Transit (NNSS-Navy Navigation Satellite System)
CHƯƠNG 1: HỆ THỐNG LORAN-C
Loran-C là hệ thống VTDĐ đo hiệu khoảng cách từ máy thu tới hai trạm phát
cố định thông qua việc đo hiệu thời gian truyền sóng Δt của hai tín hiệu tới từ
hai trạm phát đó. Việc đo thời gian thực hiện qua hai giai đoạn: ban đầu là làm
trùng đường bao xung của các xung phát phát đi từ hai trạm, sau đó là làm trùng
hợp các dao động sóng mang chứa trong đường bao tức là đo hiệu pha các sóng
tới. Như vậy hệ thống Loran-C kết hợp cả nguyên lý của hai hệ thống trước đó
là Decca và Loran-A nên còn gọi là hệ thống xung-pha.
1. Nguyên lý xây dựng hệ thống Loran-C:
1.1. Bố trí các mắt xích Loran-C:
Hệ thống Loran-C bao gồm các trạm phát trên bờ, máy thu Loran và an ten
trên tàu, các hải đồ chuyên dụng Loran. Ngoài các trạm chính và trạm phụ còn

3
có một hệ thống điều khiển và giám sát, tính toán thời gian. Máy phát phát đi
các xung tín hiệu đi theo một giãn cách thời gian chính xác, hay nói cách khác là
theo một chu kỳ lặp xung nhất định. Các trạm kiểm tra và điều khiển sẽ liên tục
đo và phân tích tín hiệu Loran, phát hiện những sự bất thường hoặc lệch các
thông số, thực hiện các thao tác điều chỉnh thích hợp. Một số trạm phát chỉ thực
hiện chức năng trong phạm vi của một mắt xích. Nhưng nói chung thường bố trí
một trạm phát sẽ phát tín hiệu cho hai mắt xích liền kề nó. Thuật ngữ này gọi là
Dual Rating.
Máy thu Loran thực hiện các chức năng phức tạp hơn, nhưng quá trình xử lý
tín hiệu thì như nhau. Bước đầu tiên là tìm kiếm và thu nhận tín hiệu, theo đó
máy thu sẽ tìm tín hiệu từ một mắt xích nhất định nào đó và xác lập hiệu thời
gian sơ bộ giữa trạm chính và trạm phụ với độ chính xác đủ để thực hiện các
thao tác theo dõi và tính toán tiếp theo.
Sau khi đã tìm được trạm phát, máy thu sẽ đồng bộ pha. Trong bước này,
máy thu tìm kiếm để xác định thành trước của xung Loran. Sau khi đã xác định
được thành trước của xung thì tiếp tục điều chỉnh để lựa chọn các chu kỳ của
xung đó để dồng bộ tiếp.
Khi đã xác định được chu kỳ chính xác, máy thu sẽ tiếp tục truy theo và
khóa đồng bộ pha, và máy thu sẽ liên tục đồng bộ với các tín hiệu thu nhận
được. Khi đã xong bước này, máy thu sẽ hiển thị hiệu thời gian của các tín hiệu
hoặc kinh vĩ độ nếu như có máy tính để xử lý và tính toán được.
Khác với hệ thống Loran-A trước đó là các trạm phát bố trí theo từng cặp,
trong hệ Loran-C, các trạm phát được bố trí theo từng mắt xích. Mỗi mắt xích
Loran-C có 3-5 trạm, trong đó có 1 trạm chính và 2-4 trạm phụ. Tất cả các trạm
trong một mắt xích hoạt động đồng bộ với nhau trên cùng một tấn số lặp xung.
Các mắt xích khác nhau thì tần số lặp xung khác nhau, nhưng toàn bộ hệ thống
hoạt động trên cùng một tần số sóng mang là 100 KHz. Nhờ phương pháp phát
tín hiệu động bộ theo mắt xích nên hệ Loran-C đảm bảo cùng một lúc có thể đo
được hiệu khoảng cách tới hai cặp trạm trong mắt xích, tăng được độ chính xác
định vị.
Một mắt xích Loran-C gồm 1 trạm chính M và 2 đến 4 trạm phụ ký hiệu X,
Y, Z, W. Khoảng cách từ trạm chính M đến trạm phụ khoảng 500-700 NM. Việc
bố trí các trạm chính và trạm phụ sao cho phạm vi xác định vị trí của mắt xích
được rộng và giảm bớt ảnh hưởng của môi trường tới đường truyền sóng. Dưới
đây là một số hình ảnh ví dụ về bố trí các trạm trong mắt xích.
4
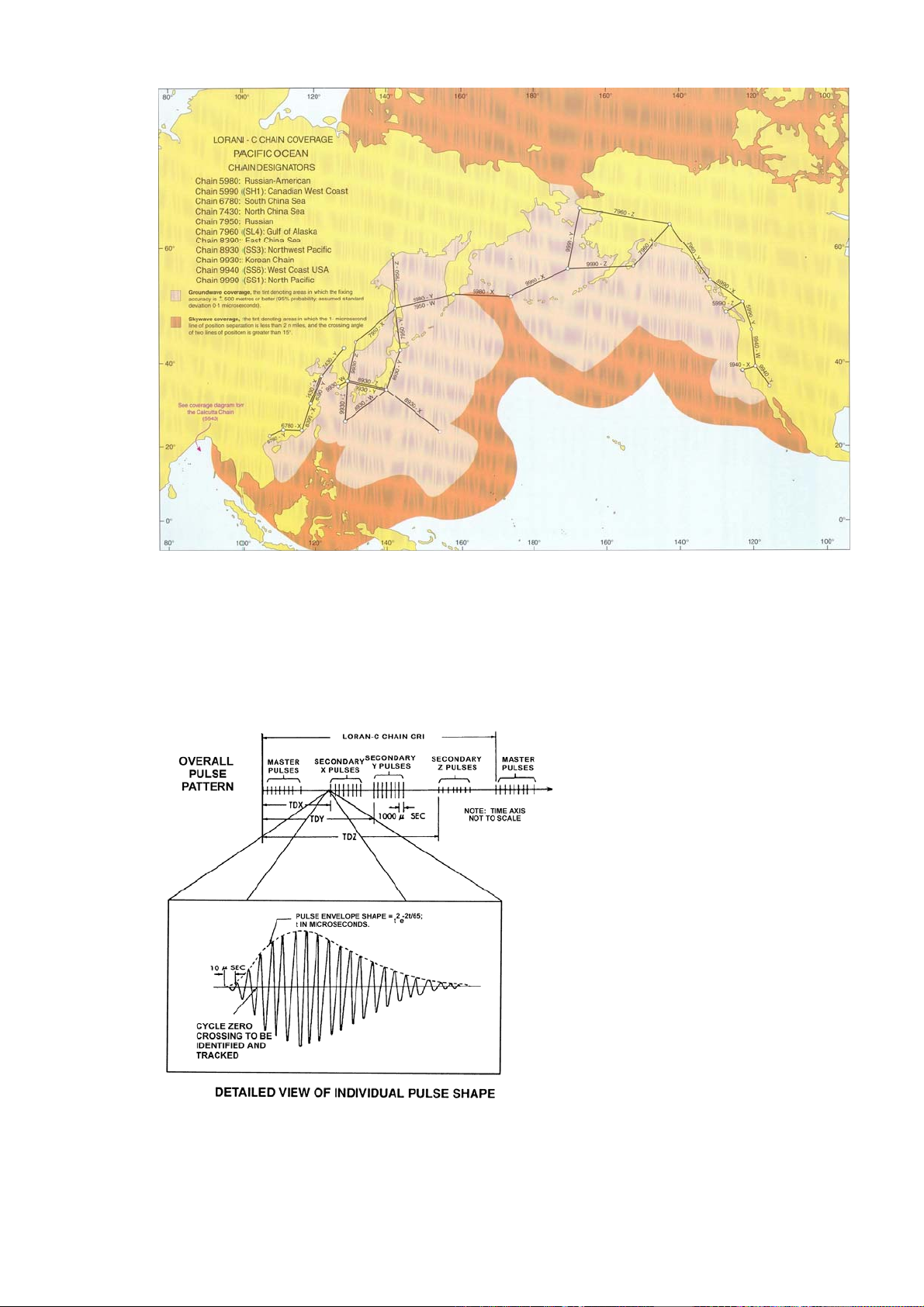
Các trạm trong 1 mắt xích phát tín hiệu đồng bộ theo một trật tự nghiêm ngặt
từ trạm chính đến trạm phụ cuối cùng. Tín hiệu của trạm phụ gồm một bó 8
xung, mỗi xung có chiều dài 200 μs, giãn cách các xung là 1000 μs. Tín hiệu
trạm chính gồm 9 xung (để phân biệt với tín hiệu trạm phụ) gồm 8 xung giống
như trạm phụ và xung thứ 9 cách xung thứ 8 một khoảng 2000 μs (xem hình vẽ).
Bắt đầu chu trình phát, trạm chính phát tín hiệu của nó gồm 1 nhóm 9 xung.
Khi xung trạm chính truyền tới trạm phụ thứ nhất thì trạm phụ này giữ chậm lại
một khoảng thời gian nhất định nào đó rồi phát tín hiệu của nó gồm một nhóm 8
5
xung. Khi xung tín hiêu trạm phụ thứ nhất này truyền tới trạm phụ thứ hai thì
trạm phụ này cũng giữ chậm lại một khoảng thời gian rồi phát tín hiệu của nó
gồm một nhóm 8 xung… cứ như vậy cho tới trạm phụ cuối cùng. Khi xung trạm
này truyền tới trạm chính thì trạm chính sẽ giữ chậm lại một khoảng thời gian
rồi phát xung tín hiệu của nó gồm một nhóm 9 xung, bắt đầu chu trình phát tiếp
theo.
Tại máy thu, sau khi đã tiến hành đồng bộ với trạm
phát, với các loại máy thu cổ điển có màn ảnh hiện thị
xung của các trạm trong mắt xích thì trên màn ảnh sẽ
thu được tín hiệu của các trạm phát trong mắt xích.
Xung tín hiệu trạm chính M sẽ luôn nằm tại đầu dòng
quét trên. Tiếp theo là tín hiệu của các trạm phụ X, Y,
Z, W.
Để phân biệt các mắt xích Loran-C, sử dụng tần số lặp xung và chu kỳ lặp
xung (GRI-Group Repetition Interval). Do các mắt xích phát chung một tần số
sóng mang là 100 KHz nên tấn số sóng mang sẽ là yếu tố duy nhất để phân biệt
các mắt xích khác nhau. Trong hệ Loran-C sử dụng 3 nhóm tần số lặp xung cơ
bản ký hiệu SS, SL, SH (SS: Slow Special; SL: Slow Low; SH: Slow High). Mỗi
nhóm tần số lặp xung cơ bản lại chia thành 8 tần số lặp xung riêng biệt ký hiệu
từ 0 đến 7. Với mỗi tần số lặp xung như trên ứng với một tần số lặp xung và chu
kỳ lặp xung cụ thể. Ví dụ:
()
100600 NTSH −= ; Đơn vị μs; tương ứng với 363
2
16 N
F+= .
()
100800 NTSL −= ; Đơn vị μs; tương ứng với 642
1
16 N
F+= .
()
1001000 NTSS −= ; Đơn vị μs; tương ứng với 100
10 N
F+= .
Chu kỳ lặp xung (thuật ngữ chuyên môn có tên là GRI-Group Repetition
Interval) là một thông số rất quan trọng của mắt xích Loran. Chu kỳ lặp xung
GRI được chia cho 10 để hình thành tên gọi của mắt xích. Ví dụ: giãn cách giữa
các lần phát xung của trạm chính mắt xích Đông Bắc Mỹ là 99,600 μs, thì khi đó
tên của mắt xích sẽ là 9960. Như trên đã nói, GRI phải đủ lớn để cho phép xung
phát từ các trạm chính và trạm phụ trong một mắt xích có thể lan truyền và bao
phủ toàn bộ vùng biển trong tầm hoạt động của nó, sau đó mới bắt đầu một chu
kỳ phát xung tiếp theo.
Với mỗi cặp trạm chính và trạm phụ, đường thẳng nối trạm chính và một
trạm phụ gọi là đượng cơ sở của cặp trạm đó (Base line). Đường cơ sở, hay nói
cách khác, là một đoạn cung vòng lớn nối hai trạm với nhau. Đường cơ sở kéo
dài (Base line extension) nằm về hai phía của hai trạm. Khu vực gần đường cơ
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)