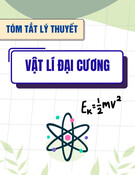
BÀI 3: HỆ LỰC KHÔNG GIAN
3.1 Liên kết trong không gian
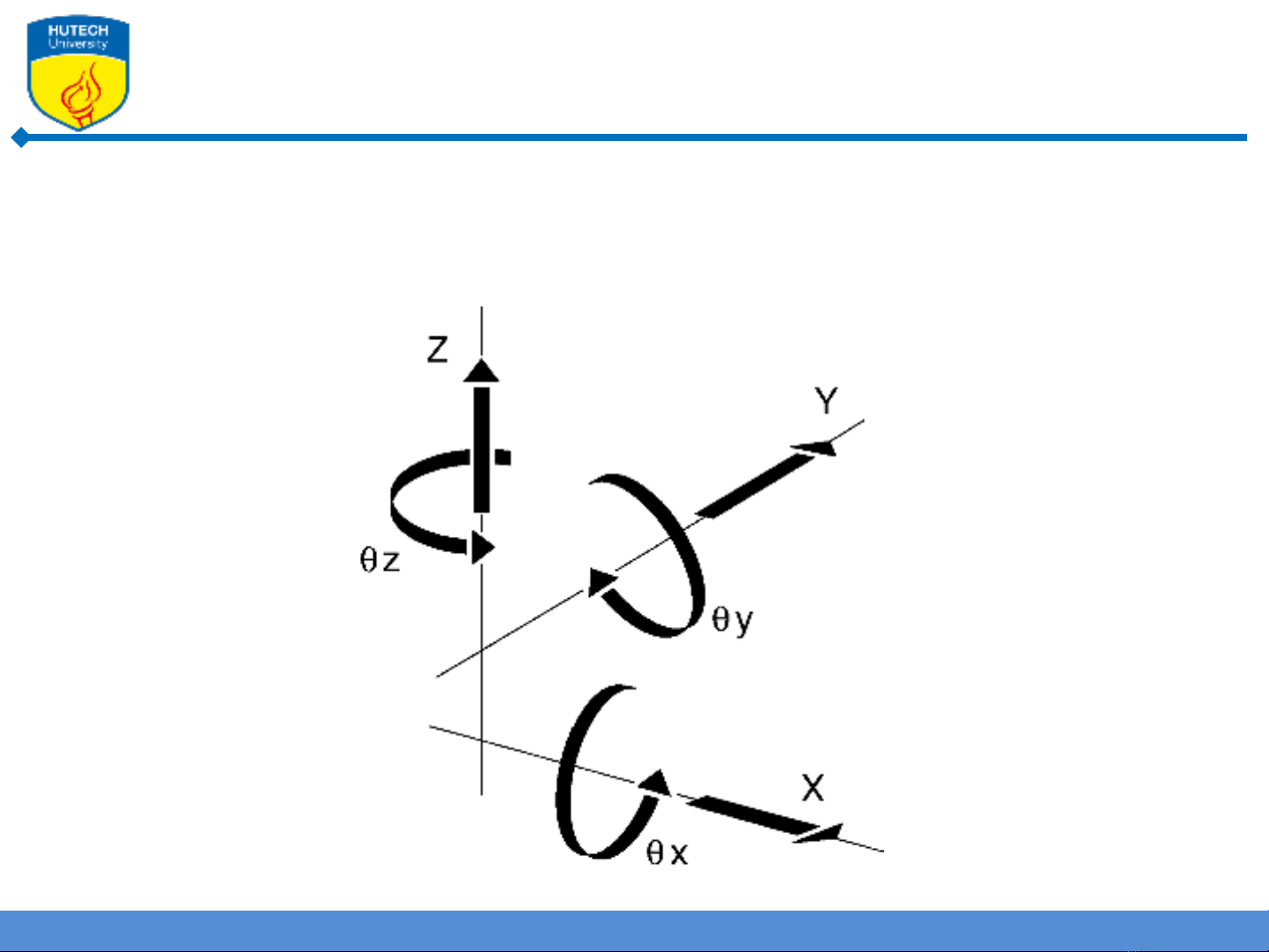
Liên kết tựa
Cản trở một chuyển động tịnh tiến
Thay thế bằng một phản lực vuông góc với mặt tựa
và hướng về phía vật rắn
3.1 Liên kết trong không gian
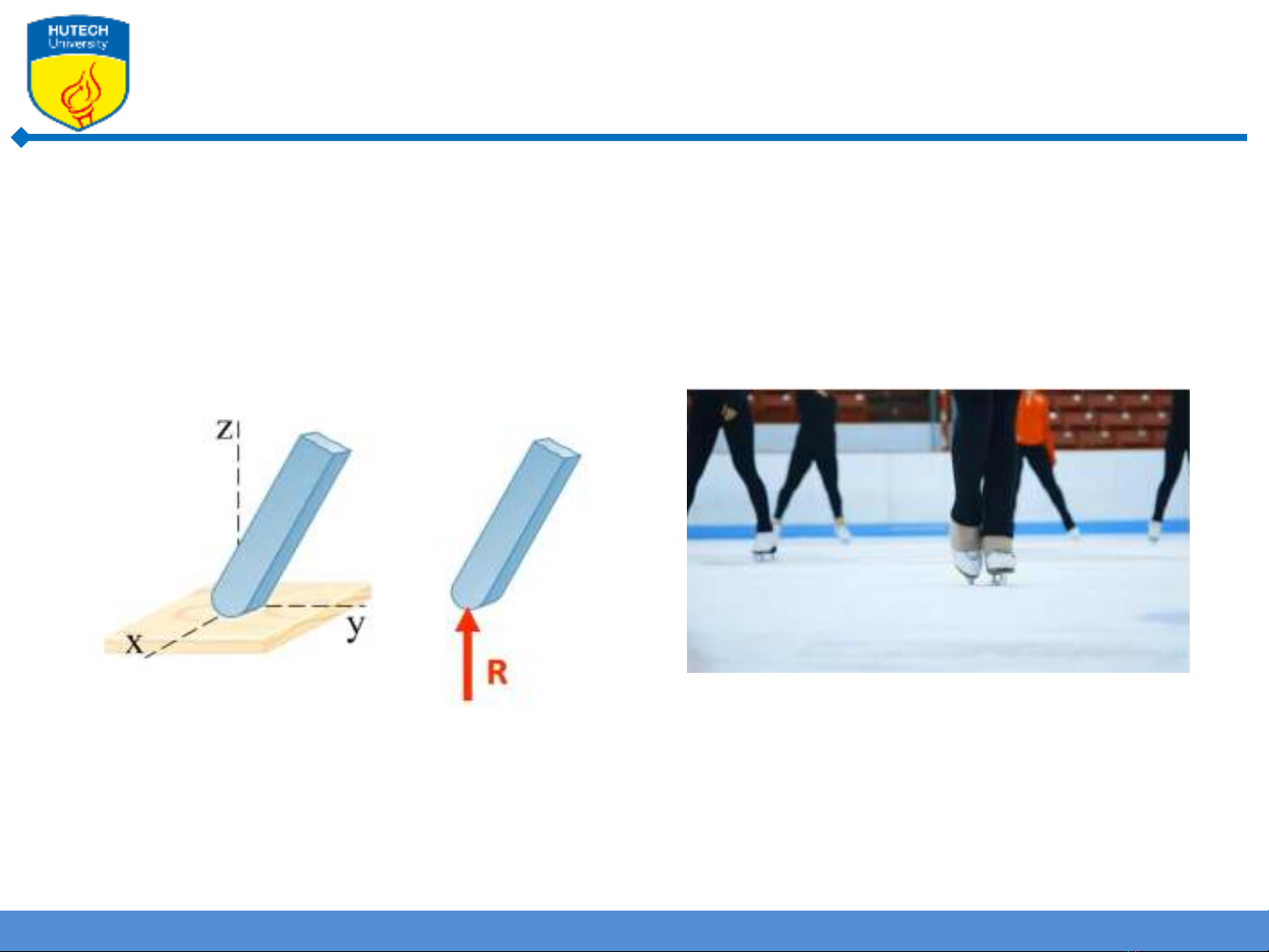
Con lăn dẫn hướng
Cản trở hai chuyển động tịnh tiến
Thay thế bằng hai phản lực vuông góc với nhau
3.1 Liên kết trong không gian
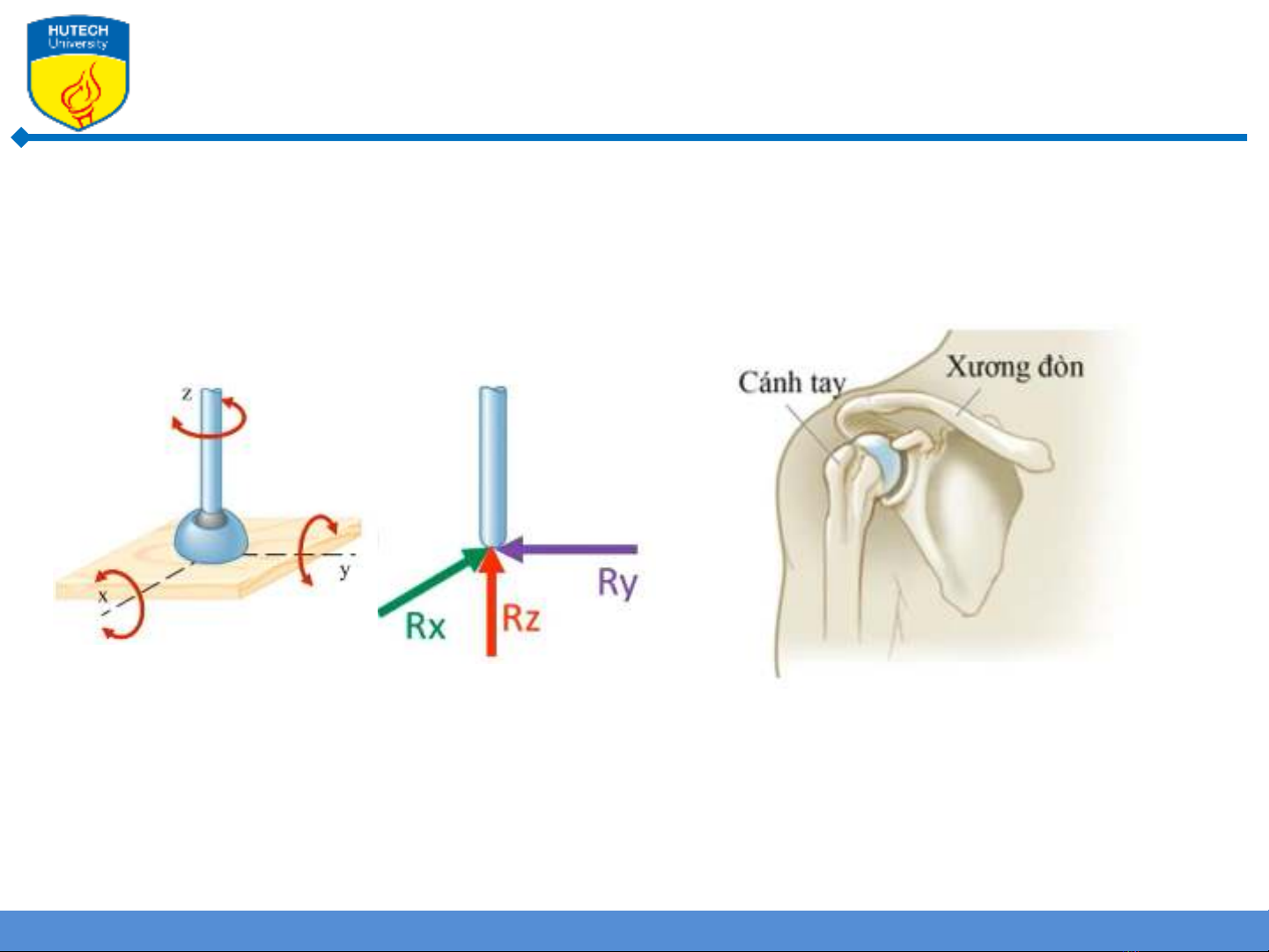
Liên kết khớp cầu
Cản trở ba chuyển động tịnh tiến
Thay thế bằng ba phản lực vuông góc với nhau
3.1 Liên kết trong không gian
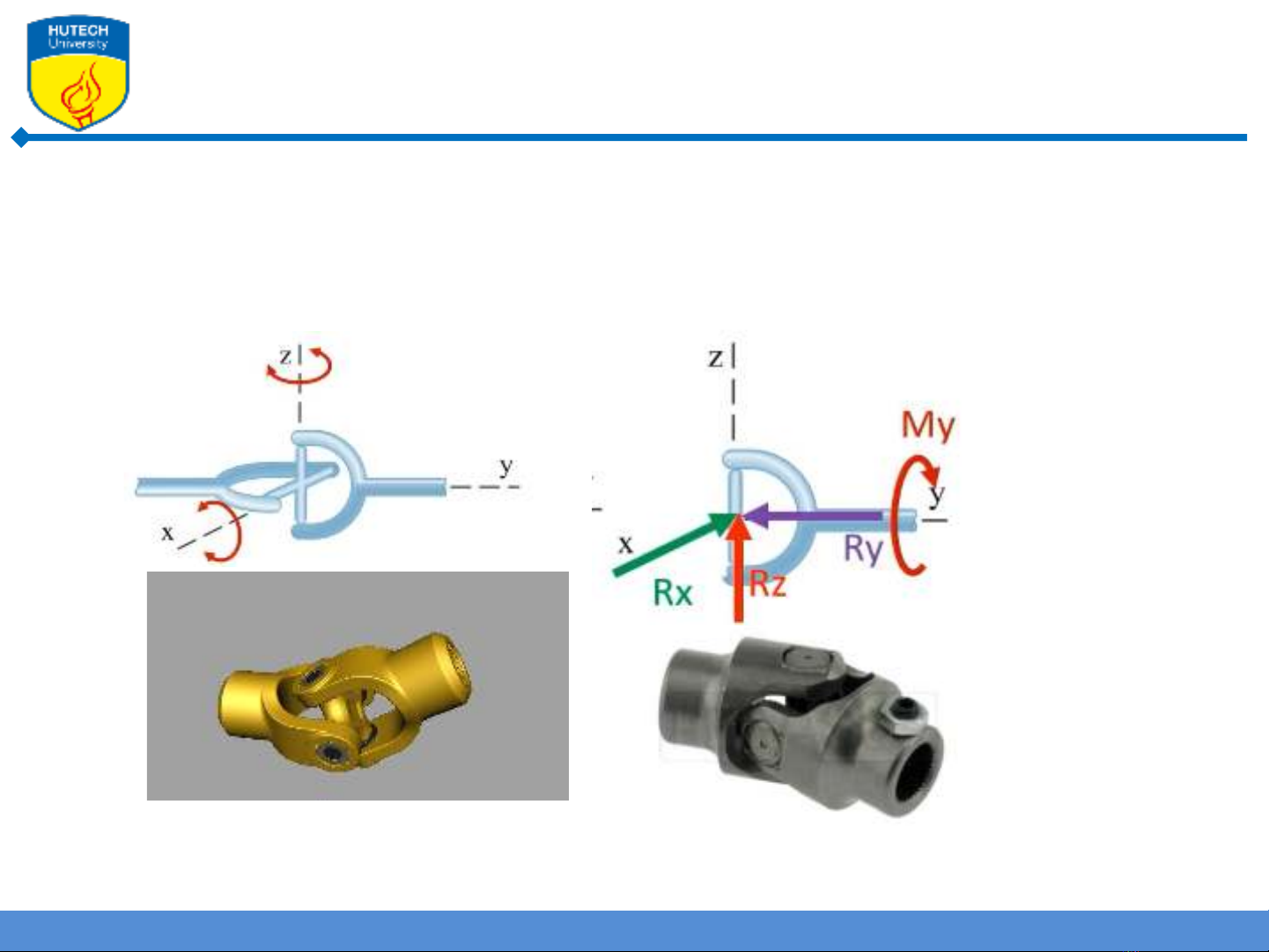
Liên kết khớp vạn năng/các-đăng
Cản trở ba chuyển động tịnh tiến và một chuyển động quay
Thay thế bằng ba phản lực vuông góc + một moment







![Bài giảng Cơ học lý thuyết Phần 2: Chương 8 [Tóm tắt kiến thức trọng tâm]](https://cdn.tailieu.vn/images/document/thumbnail/2023/20230228/bapxao06/135x160/6851677558477.jpg)




![Bộ câu hỏi lý thuyết Vật lý đại cương 2 [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251003/kimphuong1001/135x160/74511759476041.jpg)
![Bài giảng Vật lý đại cương Chương 4 Học viện Kỹ thuật mật mã [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250925/kimphuong1001/135x160/46461758790667.jpg)