Chuong 5.
Chuong 5.
Mô hình máy đi n xoay chi u trong ệ ề
Mô hình máy đi n xoay chi u trong ệ ề
h t a đ hai phaệ ọ ộ
h t a đ hai phaệ ọ ộ
Những nội dung nghiên cứu
Những nội dung nghiên cứu
+ Vì sao cần nghiên cứu mô hình máy điện xoay chiều trong
+ Vì sao cần nghiên cứu mô hình máy điện xoay chiều trong
hệ tọa độ hai pha.
hệ tọa độ hai pha.
+ Nhắc lại phương pháp kinh điển điều khiển động cơ xoay
+ Nhắc lại phương pháp kinh điển điều khiển động cơ xoay
chiều không đồng bộ ba pha roto lồng sóc
chiều không đồng bộ ba pha roto lồng sóc
+ Tiệm cận phương pháp điều khiển vec tơ
+ Tiệm cận phương pháp điều khiển vec tơ
+ Xây dựng vec tơ không gian của các đại lượng ba pha
+ Xây dựng vec tơ không gian của các đại lượng ba pha
+ Mô hình động cơ không đồng bộ ba pha trong hệ tọa độ từ
+ Mô hình động cơ không đồng bộ ba pha trong hệ tọa độ từ
trường quay roto
trường quay roto
+Nguyên lý điều chế vec tơ không gian
+Nguyên lý điều chế vec tơ không gian
+ Ứng dụng thực tiễn của phương pháp điều khiển vec tơ
+ Ứng dụng thực tiễn của phương pháp điều khiển vec tơ
động cơ xoay chiều KĐB ba pha
động cơ xoay chiều KĐB ba pha
5.1: Vì sao cần nghiên cứu mô hình máy điện xoay chiều trong hệ tọa
5.1: Vì sao cần nghiên cứu mô hình máy điện xoay chiều trong hệ tọa
độ hai pha.
độ hai pha.
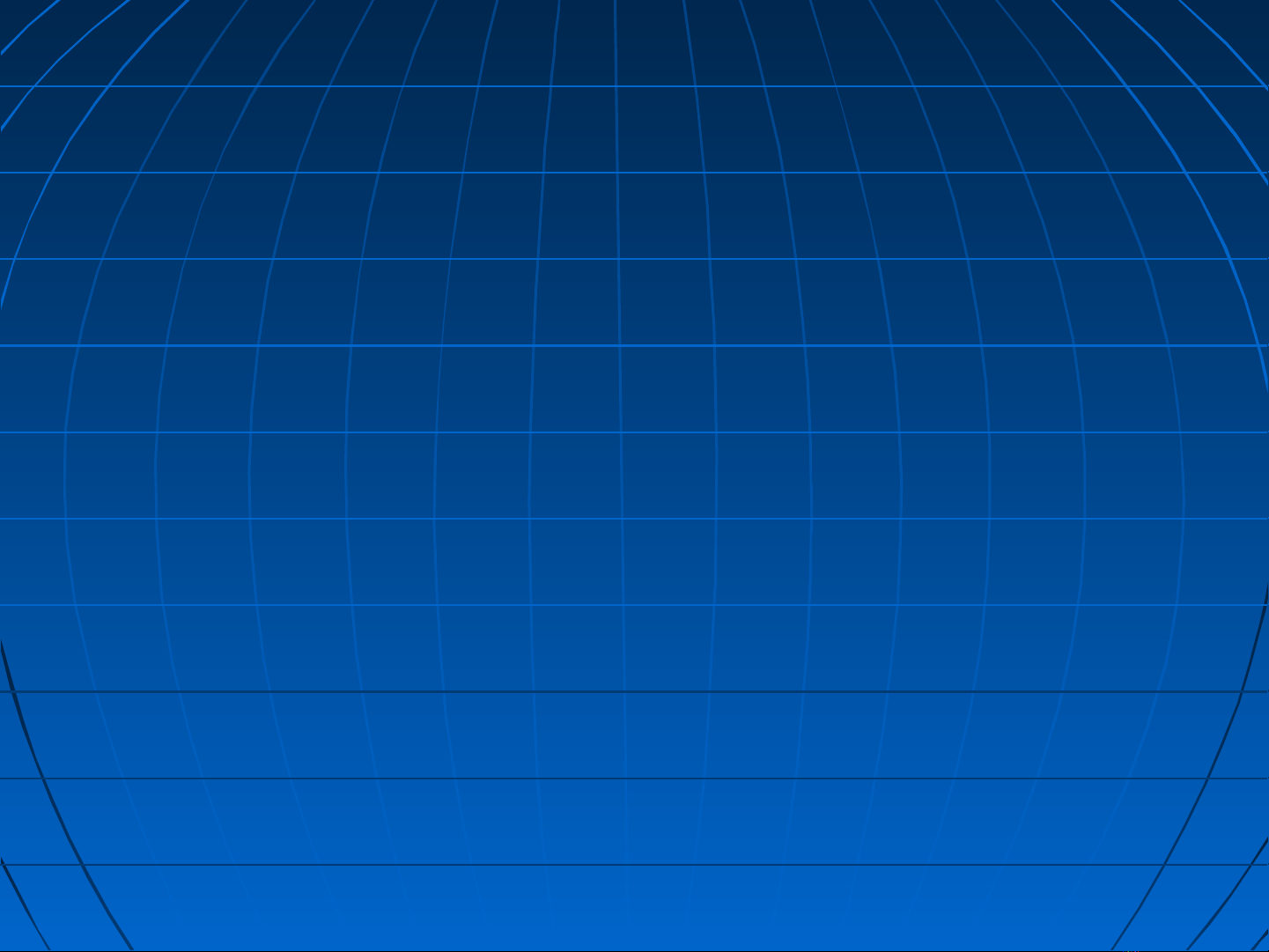
1. Mô hình máy điện một chiều kích từ độc lập
1. Mô hình máy điện một chiều kích từ độc lập
Mô hình mạch
Mô hình mạch
2. Mô hình động học MĐMC điều khiển ĐA phần ứng
2. Mô hình động học MĐMC điều khiển ĐA phần ứng
U=i
U=iư
ư r
rư
ư + L
+ Lư
ưdi
diư
ư/dt; M = C
/dt; M = Cm
mi
iư
ưФ
Ф; i
; iư
ưr
rư
ư = U-E
= U-Eư
ư ;
;
E
Eư
ư= C
= Cm
mФ
Ф ω
ω ; M-M
; M-Mc
c = Jd
= Jdω
ω/dt
/dt
M
Mc
c
Nguồn
KT
Nguồn
PƯ
1/(rư+pLư)Cm Ф
Ф
Cm Ф
Ф
1/Jp
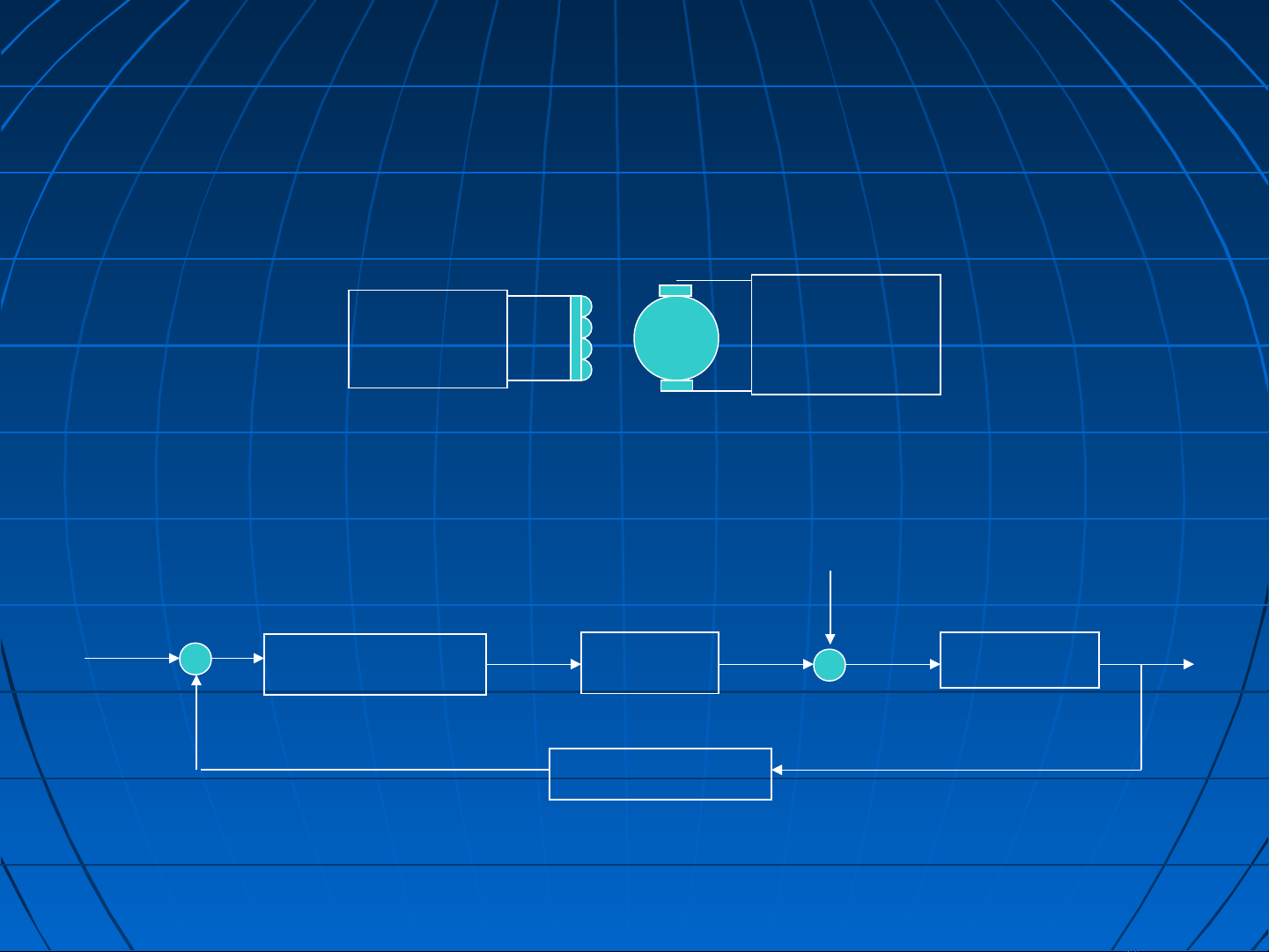
3. Mô hình máy điện XC hai pha
3. Mô hình máy điện XC hai pha
Mô hình mạch
Mô hình mạch
4. Mô hình động học MĐXC hai pha
4. Mô hình động học MĐXC hai pha
U=i
U=iư
ư r
rư
ư + L
+ Lư
ưdi
diư
ư/dt; M = C
/dt; M = Cm
mi
iư
ưI
Iđk
đk;
;
M-M
M-Mc
c = Jd
= Jdω
ω/dt
/dt
M
Mc
c
Nhận xét: + Phương pháp điều khiển; mô hình
Nhận xét: + Phương pháp điều khiển; mô hình
1/(rư+pLư)Cm Iđk1/Jp
Nguồn
ĐK
Nguồn PƯ
5.2 Ph ng pháp kinh đi n đi u khi n đ ng c xoay chi u ươ ể ề ể ộ ơ ề
5.2 Ph ng pháp kinh đi n đi u khi n đ ng c xoay chi u ươ ể ề ể ộ ơ ề
KĐBBP roto l ng sócồ
KĐBBP roto l ng sócồ
1. Đặc điểm của động cơ không đồng bộ ba pha:
1. Đặc điểm của động cơ không đồng bộ ba pha:
+ Không tách biệt dòng từ hóa (dòng kích thích) và dòng
+ Không tách biệt dòng từ hóa (dòng kích thích) và dòng
momen (dòng phần ứng).
momen (dòng phần ứng).
+ Khi thay đổi điện áp hoặc dòng Stator sẽ làm cả hai thành
+ Khi thay đổi điện áp hoặc dòng Stator sẽ làm cả hai thành
phần dòng này thay đổi. Đây là nguyên nhân chính làm
phần dòng này thay đổi. Đây là nguyên nhân chính làm
cho đặc tính của MĐKĐB có tính phi tuyến lớn; giải điều
cho đặc tính của MĐKĐB có tính phi tuyến lớn; giải điều
chỉnh hẹp;
chỉnh hẹp;
+ Dòng từ hóa không khống chế có thể làm từ thông vượt
+ Dòng từ hóa không khống chế có thể làm từ thông vượt
quá giá trị cho phép gây quá tải mạch từ.
quá giá trị cho phép gây quá tải mạch từ.
Đây là nguyên nhân máy XC có khả năng quá tải kém máy
Đây là nguyên nhân máy XC có khả năng quá tải kém máy
một chiều.
một chiều.
+ Khả năng đổi chiều quay: kém linh động, gây đột biến tốc
+ Khả năng đổi chiều quay: kém linh động, gây đột biến tốc
độ giữa hai chiều quay tại điểm đổi chiều
độ giữa hai chiều quay tại điểm đổi chiều
2. Các phương pháp ĐK tốc độ ĐCXCKĐB
2. Các phương pháp ĐK tốc độ ĐCXCKĐB
a. Điều khiển điện áp Stator
a. Điều khiển điện áp Stator
b. Điều khiển điện kháng nối tiếp trong mạch Stator
b. Điều khiển điện kháng nối tiếp trong mạch Stator
c. Điều khiển tần số f với các quy luật:
c. Điều khiển tần số f với các quy luật:
U/f = const: Quy luật dự trữ momen không đổi
U/f = const: Quy luật dự trữ momen không đổi
M
Mmax
max/M = const. Bảo đảm từ thông không đổi
/M = const. Bảo đảm từ thông không đổi
U
U2
2/f = const : Quy luật giữ momen cực đại không đổi
/f = const : Quy luật giữ momen cực đại không đổi
Điểm chung của các phương pháp điều khiển: Tác
Điểm chung của các phương pháp điều khiển: Tác
động vào mạch Stator, thay đổi giá trị hiệu dụng của
động vào mạch Stator, thay đổi giá trị hiệu dụng của
điện áp hoặc dòng điện.
điện áp hoặc dòng điện.
![Bài giảng chỉnh lưu điều khiển 3 pha [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2018/20180804/quaanghuy123/135x160/4891533400999.jpg)
![Bài giảng chỉnh lưu điều khiển 1 pha [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2018/20180804/quaanghuy123/135x160/681533401001.jpg)






















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)