π
b
1
≡b
2
k
n
b
3
b
3
d
3
≡d
4
n
e
4
e
4
≡ e
5
Hình 2.1c
CH NƯƠ G 2: PHÂN TÍCH Đ NG H C C C U PH NG LO I 2Ộ Ọ Ơ Ấ Ẳ Ạ
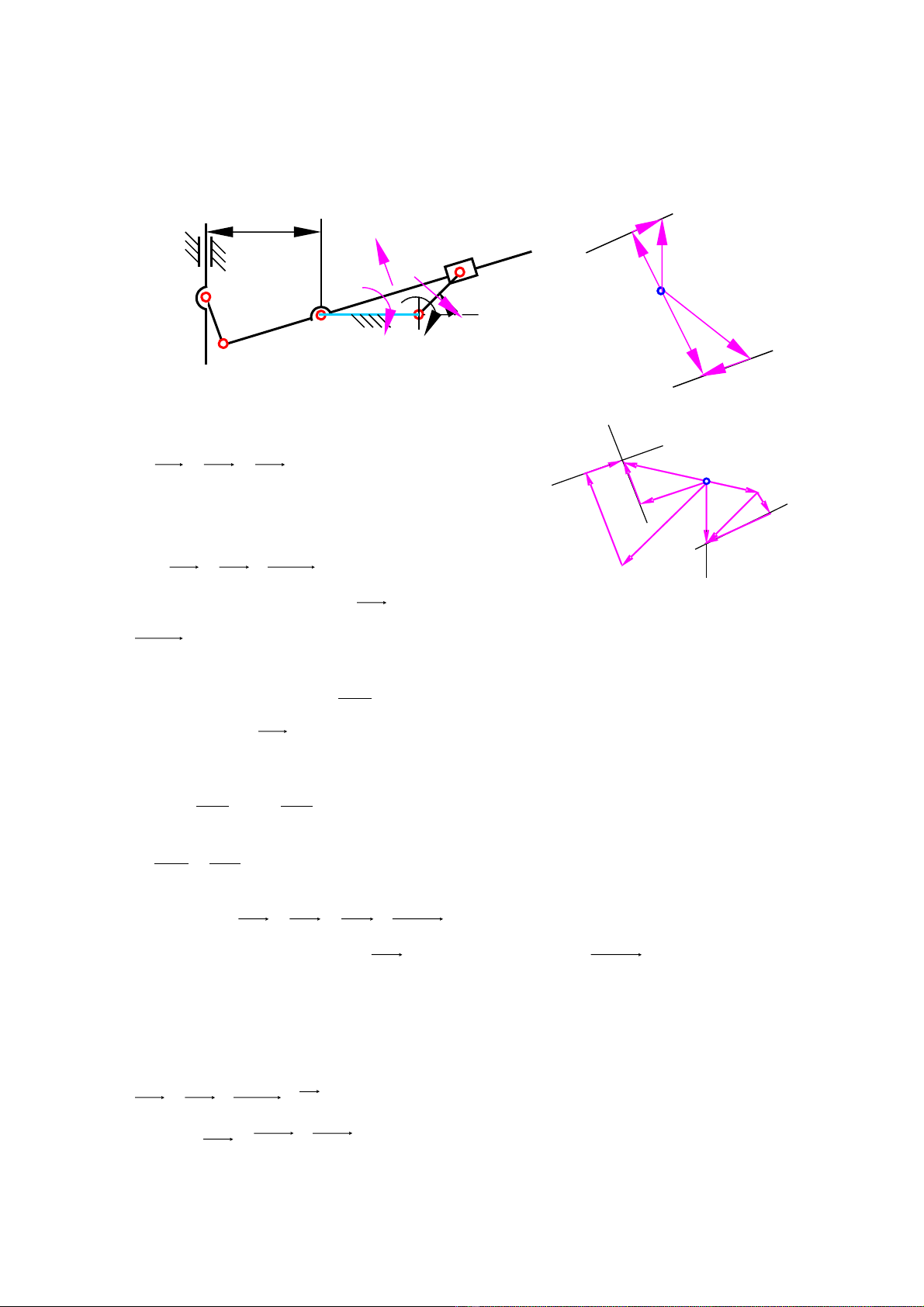
1) Xác đ nh v n t c và gia t c c a dao bào E trong c c u máy bào x c (hình 2.1a) khi tayị ậ ố ố ủ ơ ấ ọ
quay 1 quay đ u v i v n t c góc ề ớ ậ ố
1
110 −
=s
ω
t i v trí ạ ị
o
45
1=
ϕ
. Cho bi t kích th c cácế ướ
khâu c a c c u: ủ ơ ấ
mll EDAB 2,0==
;
mll CDAC 3,0==
; a = 0,35m.
Hình 2.1a Hình 2.1b
B1 ≡ B2 ≡ B3, khâu 1 n i v i khâu 2 b ng kh pố ớ ằ ớ
quay, khâu 2 n i v i khâu 3 b ng kh p tr tố ớ ằ ớ ượ
321 BBB VVV ≠=
Giá tr : ị
smlVV ABBB /22,0.10.
1
21 ====
ω
, có
ph ng vuông góc v i khâu AB, chi u theo chi u v n t cươ ớ ề ề ậ ố
góc khâu 1.
2323 BBBB VVV +=
(1)
Trong ph ng trình (1), ươ
3
B
V
vuông góc v i BC,ớ
23 BB
V
có ph ng song song v i BC. ươ ớ
Ch n t l xích đ v : ọ ỷ ệ ể ẽ
)//(
2
2mmsm
pb
VB
V=
µ
. Ho đ v n t c đ c v nh hình 2.1b.ạ ồ ậ ố ượ ẽ ư ở
Đo giá tr véc t ( ị ơ
3
pb
) bi u di n v n t c đi m Bể ễ ậ ố ể 3 và nhân v i t l xích ta thu đ c giá tr th c v nớ ỷ ệ ượ ị ự ậ
t c đi m Bố ể 3.
BC
V
BC
B
l
pb
l
V3
3.
3
µω
==
Vì
CD
BC
D
B
l
l
V
V=
3
3
, t đó suy ra v n t c c a đi m Dừ ậ ố ủ ể
E4 ≡ E5 và khâu 4 n i v i khâu 5 b ng kh p quay:ố ớ ằ ớ
44445 DEDEE VVVV +==
(2)
Trong ph ng trình này: ươ
4
E
V
có ph ng th ng đ ng. ươ ẳ ứ
44 DE
V
có ph ng vuông góc v iươ ớ
DE. Ho đ đ c v nh hình 2.1b.ạ ồ ượ ẽ ư ở
Ta đo đo n ạ
5
pe
và nhân v i t l xích đã ch n s có giá tr v n t c khâu 5, chi u đi lên.ớ ỷ ệ ọ ẽ ị ậ ố ề
T ng t ta cũng xác đ nh đ c gia t c:ươ ự ị ượ ố
22
1/202,0.100
21 smlaa ABBB ====
ω
có chi u h ng t B đi vào Aề ướ ừ
k
BBBB aaaa ++= 2323
M t khác ặ
τ
CB
n
CB
Baaa 33
3+=
, do v yậ
A
B
C
D
E
1
2
3
4
5
ϕ1
ω
a
p
b1≡b2
b3
d3≡d4
e5≡e4
ω
3
ak
τ
CB
n
CB
Baaa 33
3+=
=
k
BBB aaa ++ 232
(3)
Trong ph ng trình (3) :ươ
AB
n
CB la .
2
3
3
ω
=
; đã xác đ nh v giá tr có ph ng chi u h ng t B đi vào C.ị ề ị ươ ề ướ ừ
?.
3
3== AB
CB la
ε
τ
; ph ng vuông góc v i BC.ươ ớ
3232 .2.2 23 bbVa VBB
k
µωω
==
; Ph ng chi u l y theo chi u ươ ề ấ ề
23 BB
V
quay đi m t góc 90ộ0 theo
chi u ề
3
ω
.
?
23 =
BB
a
, ph ng song song v i BC.ươ ớ
Ph ng trình (3) ch t n t i 2 n s , ch n t l xích ho đ gia t c: ươ ỉ ồ ạ ẩ ố ọ ỷ ệ ạ ồ ố
)//( 2
2
2mmsm
b
aB
a
π
µ
=
.
Cách gi i đ c trình bày trên hình 2.1cả ượ
Các giá tr đ c đo tr c ti p trên các véc t bi u di n t ng ng sau đó nhân v i t l xích đã ch n.ị ượ ự ế ơ ể ễ ươ ứ ớ ỷ ệ ọ
Xác đ nh gia t c góc khâu 3:ị ố
BC
n
al
bb 3
3
3
µε
=
Xác đ nh gia t c đi m Dị ố ể 3 cũng b ng ph ng pháp đ ng d ngằ ươ ồ ạ
τ
4444
44 DE
n
DE
DE aaaa ++=
(4)
Cách lý lu n cũng t ng t . Cách gi i trình bày trên hình 2.1cậ ươ ư ả
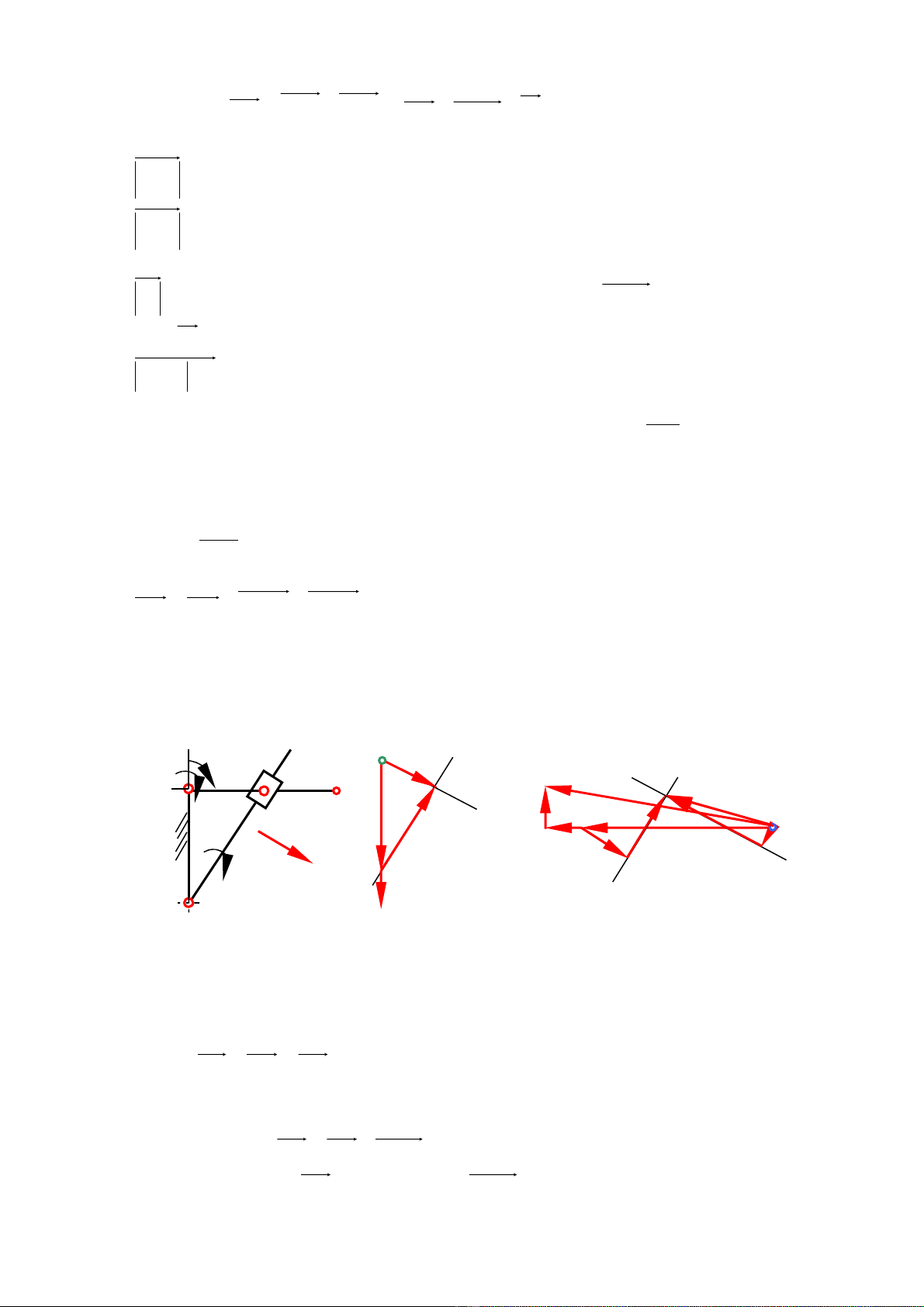
2) Tính v n t c và gia t c đi m Dậ ố ố ể 2 (∠ DBC = 1200) trên con tr t 2 c a c c u cu lít t i v tríượ ủ ơ ấ ạ ị
ϕ
1=900. Tay quay AB quay đ u v i v n t c góc ề ớ ậ ố ω1 = 20s-1. Cho bi t kích th c các khâu c aế ướ ủ
c c u: ơ ấ lAB = lBD = 0,5lBC = 0,2m.
Hình 2.2a Hình 2.2b Hình 2.2c
S t ng quan kích th c đã cho ta th y r ng tam giác ABC là n a tam giác đ u,ự ươ ướ ấ ằ ử ề
(∠ABC=600) BD thu c khâu 2. Đ xác đ nh v n t c đi m D, tr c tiên ta ph i bi t v n t c đi m Bộ ể ị ậ ố ể ướ ả ế ậ ố ể 2 và
v n t c góc khâu 2, sau áp d ng đ nh lý h p v n t c s thu đ c v n t c đi m D. Khâu 2 tr t trongậ ố ụ ị ợ ậ ố ẽ ượ ậ ố ể ượ
khâu 3 và quay theo khâu 3 cho nên t c đ góc khâu 2 cũng chính là t c đ góc khâu 3.ố ộ ố ộ
B1 ≡ B2 ≡ B3, khâu 1 n i v i khâu 2 b ng kh p quay, khâu 2 n i v i khâu 3 b ng kh p tr tố ớ ằ ớ ố ớ ằ ớ ượ
321 BBB VVV ≠=
Giá tr : ị
smlVV ABBB /42,0.20.
1
21 ====
ω
, có ph ng vuông góc v i khâu AB, chi u theoươ ớ ề
chi u v n t c góc khâu 1.ề ậ ố
2323 BBBB VVV +=
(1)
Trong ph ng trình (1), ươ
3
B
V
vuông góc v i BC, ớ
23 BB
V
có ph ng song song v i BCươ ớ
AB
C
D
2
1
3
ω
ϕ1
ω
p
b1 ≡ b2
b3
d2
ak
ε3
b1 ≡ b2
b3
k
b3
n
π
d2
n
d2
Trong tr ng h p đ c bi t này ta không c n ch n t l xích. Ho đ v n t c đ c v nh hìnhườ ợ ặ ệ ầ ọ ỷ ệ ạ ồ ậ ố ượ ẽ ư ở
2.2b.
Tam giác pb2b3 đ ng d ng v i tam giác BCA, ta tính đ c v n t c đi m bồ ạ ớ ượ ậ ố ể 3:
smVV BB /22/
23 ==
.
T c đ góc khâu 3 và khâu 2: ố ộ
srad
l
V
BC
B/5
4,0
2
3
32 ====
ωω
. Chi u đ c xác đ nh nh hình về ượ ị ư ẽ
2222 BDBD VVV +=
(2)
Trong ph ng trình (2) ta đã bi t v n t c đi m Bươ ế ậ ố ể 2 ,
smlV BDBD /12,0.5.
2
22 ===
ω
.
Chi u h ng t trên xu ng theo chi u ề ướ ừ ố ề ω2 và vuông góc v i BD. Ho đ đ c v ti p nh hìnhớ ạ ồ ượ ẽ ế ư ở
2.2b. Giá tr v n t c đi m D đ c tính:ị ậ ố ể ượ
smVVV BDBD /514
2222 =+=+=
T ng t ta cũng tính đ c gia t c đi m Dươ ự ượ ố ể 2:
321 BBB aaa ≠=
22
1/802,0.400.
21 smlaa ABBB ====
ω
kBBBB aaaa ++= 2323
τ
CB
n
CB
Baaa 33
3+=
kBBB aaa ++ 232
=
τ
CB
n
CB
aa 33 +
(2)
Trong ph ng trình trên (2) Ta có đ c:ươ ượ
2
B
a
: Đã xác đ nh; ị
23 BB
a
: Giá tr ch a bi t, ph ng song song v i BC.ị ư ế ươ ớ
2
3/32032.5.2.2 23 smVa BBk ===
ω
22
3
/104,0.25.
3smla
BC
n
CB
===
ω
?.
3
3
==
BC
CB
la
ε
τ
, có ph ng vuông góc v i BC.ươ ớ
Ph ng trình (2) t n t i 2 n s , Ho đ gia t c đ c v nh hình 2.1cươ ồ ạ ẩ ố ạ ồ ố ượ ẽ ư ở
Gia t c góc khâu 2 và khâu 3 đ c tính nh sau:ố ượ ư
BC
CB
l
a
τ
εε
3
32 ==
on
B
o
o
k
o
n
B
B
CB tga
a
a
aa 6060sin)
60sin60cos
(3
3
2
3+
+−=
τ
2
/63,47310
2
3
)40580( sm=+−−=
2
32 /075,119
4,0
63,47
3srad
l
a
BC
CB ====
τ
εε
τ
2222
22 BD
n
BD
BD aaaa ++=
(3)
Trong ph ng trình (3) Ta đã bi t:ươ ế
22
2/52,0.25.
22 smla BD
n
BD ===
ω
2
2/815,282,0.075,119.
2smla BD
BD ===
ε
τ
Ho đ gia t c đ c v trên hình 2,2cạ ồ ố ượ ẽ
Giá tr gia t c đi m D đ c tính: ị ố ể ượ
( )
22
2/27,88815,28580
2smaD=++=
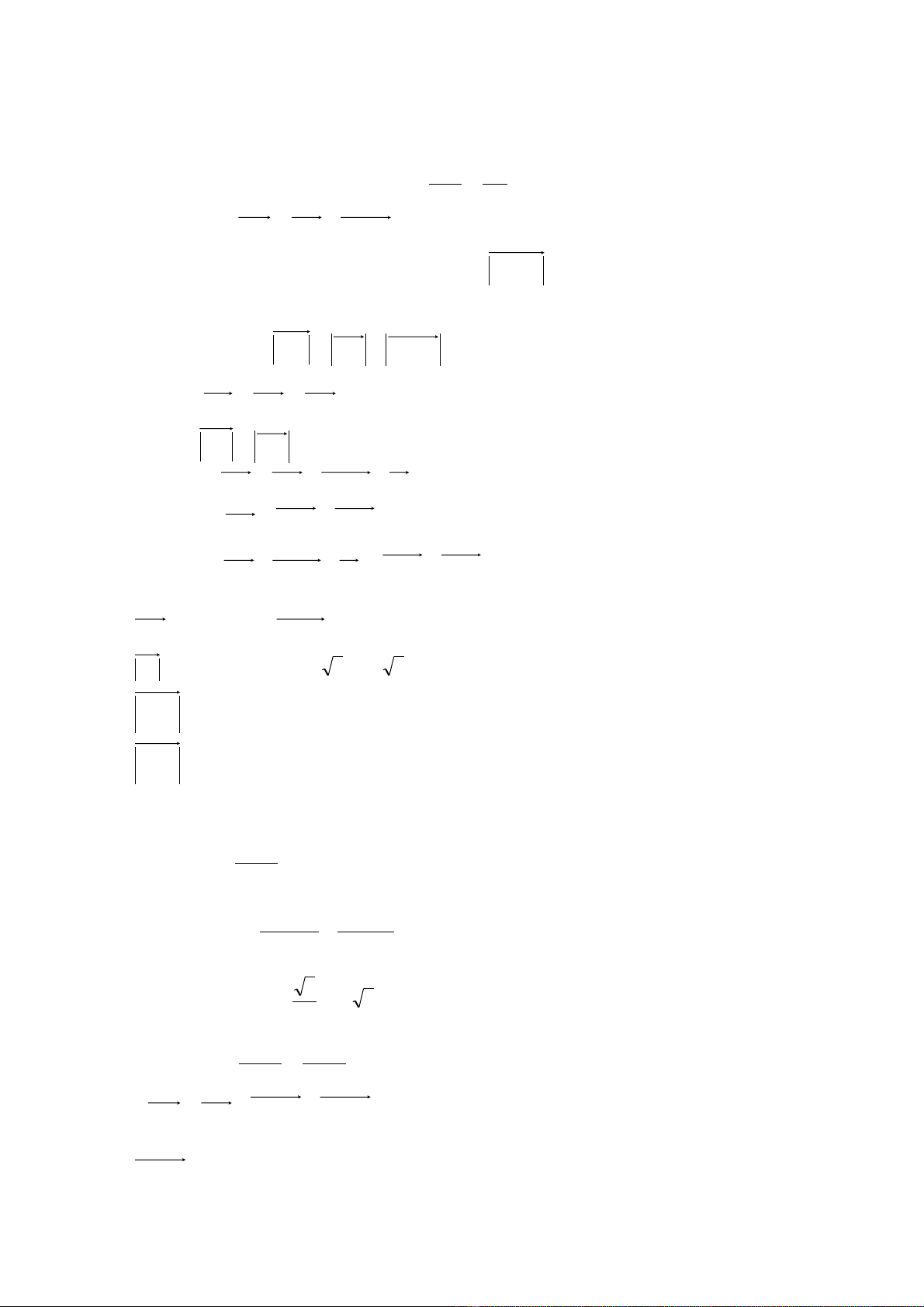
3) Tính v n t c và gia t c khâu 3 c a c c u tính tang m t góc, n u tay quay AB quay đ u v iậ ố ố ủ ơ ấ ộ ế ề ớ
v n t c góc ậ ố ω= 10s-1, t i v trí ạ ị ϕ1 = 60o. Cho tr c h = 0,05m (hình 2.3a).ướ
Hình 2.3a Hình 2.3b Hình 2.3c
Vì khâu 3 chuy n đ ng t nh ti n, cho nên m i đi m trên khâu 3 đ u có v n t c và gia t c nhể ộ ị ế ọ ể ề ậ ố ố ư
nhau. Chúng ta đi xác đ nh v n t c và gia t c đi m Bị ậ ố ố ể 3 .
B1 ≡ B2 ≡ B3 . Khâu 1 n i v i khâu2 b ng kh p t nh ti n, khâu 2 n i v i khâu 3 b ng kh p quay:ố ớ ằ ớ ị ế ố ớ ằ ớ
321 BBB VVV =≠
smlV ABB /577,0
3
3
10.05,0.
3
3
2.
1
1====
ω
1212 BBBB VVV +=
(1)
//BC //AB
Ph ng trình ch t n t i hai n s là giá tr v n t c đi m Bươ ỉ ồ ạ ẩ ố ị ậ ố ể 2 và v n t c t ng đ i gi a 2 đi m Bậ ố ươ ố ữ ể 1
và B2. Ho đ véc t v n t c đ c v nh hình 2.3b.ạ ồ ơ ậ ố ượ ẽ ư
V n t c đi m Bậ ố ể 2 đ c tính nh sau: ượ ư
./67,0
3
3
222 smVV BB ==
chi u đ c xác đ nh nh trên hoề ượ ị ư ạ
đ v n t c (hình 2.3b).ồ ậ ố
T ng t gia t c ta cũng có: ươ ự ố
321 BBB aaa =≠
22
1/
3
3
1005,0.
3
3
2.100.
1smla ABB ===
ω
kBBBB aaaa ++= 1212
//BC // AB
:
k
a
có giá tr là ị
2
1/
3
3
10
6
3
.10.2..2 12 smV BB ==
ω
.
Ph ng chi u theo chi u c a ươ ề ề ủ
12 BB
V
quay đi m t góc 90ộo theo chi u ềω1 . Ho đ gia t cạ ồ ố
đ c v nh hình 2.3c. Giá tr gia t c khâu 3 đ c tính:ượ ẽ ư ở ị ố ượ
2
/7,6
3
3
.
3
3
.10.2
3
3
2
32 smaaa kBB ====
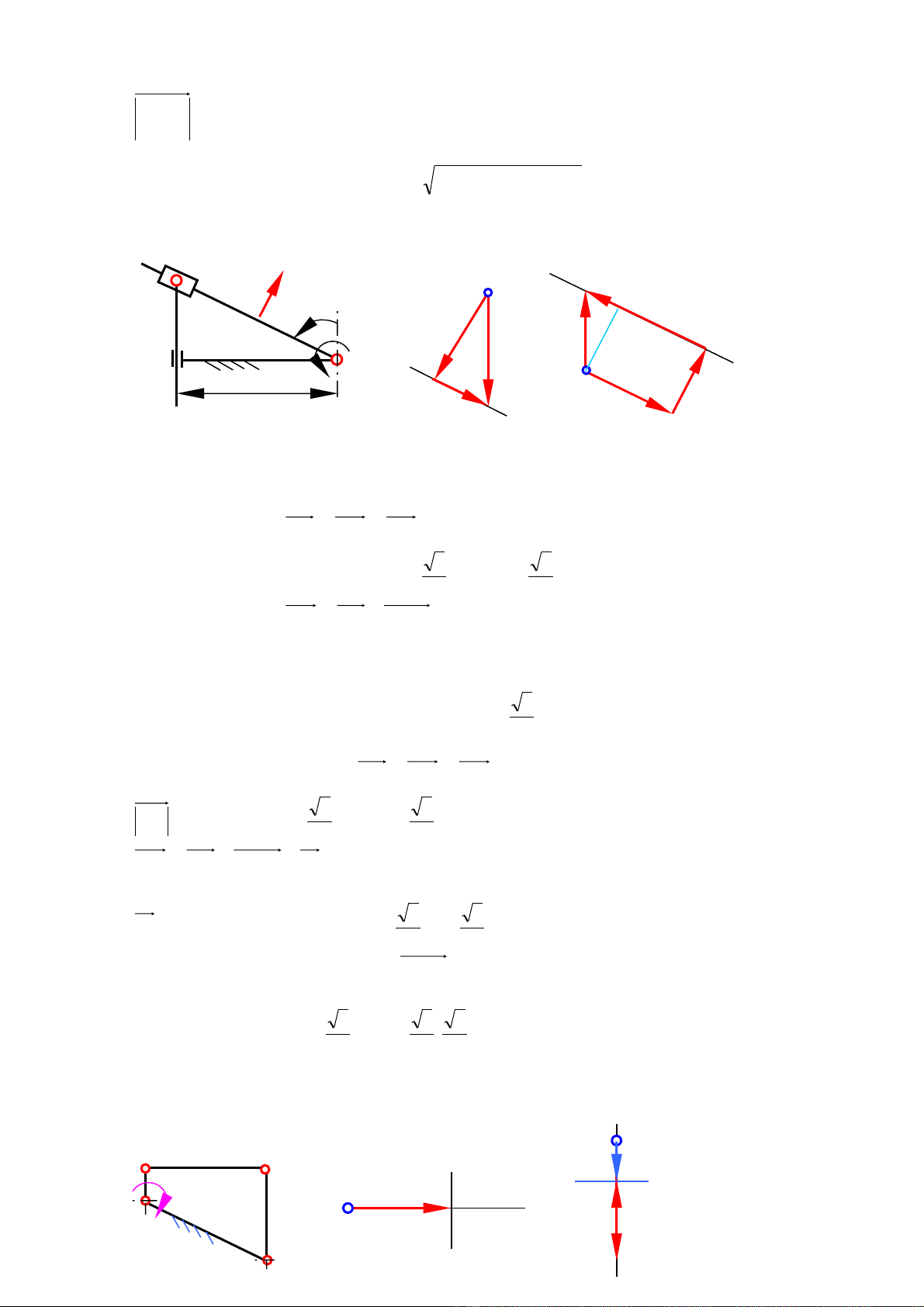
4) Tính v n t c và gia t c đi m C (hình 2.4a), v n t c góc và gia t c góc c a các khâu 2 và 3ậ ố ố ể ậ ố ố ủ
trong c c u 4 khâu b n l t i v trí ơ ấ ả ề ạ ị ∠ABC = ∠BCD = 90o , n u tay quay AB quay đ u v iế ề ớ
v n t c góc ậ ố ω1= 20s-1. Cho tr c kích th c c a các khâu ướ ướ ủ 4lAB = lBC = lCD = 0,4m.
p
b1b2, b3
A
B
C
h
ϕ1
1
2
3
ak
b1
k
b3, b2
π
p
b1, b2, c2,c3
b1, b2
c2,c3
π
A
B
C
D
12
3
ω1
ω3
ω2
Hình 2.4a Hình 2.4b Hình 2.4c
B1 ≡ B2. Khâu 1 n i v i khâu 2 b ng kh p quay:ố ớ ằ ớ
21 BB VV =
smlV ABB /21,0.20.
1
1===
ω
T ng t : Cươ ự 2 ≡ C3 và
32 CC VV =
2222 BCBC VVV +=
(1)
⊥CD ⊥BC
Ph ng trình ch t n t i hai n s là giá tr v n t c đi m Cươ ỉ ồ ạ ẩ ố ị ậ ố ể 2 và v n t c t ng đ i gi a 2 đi m Cậ ố ươ ố ữ ể 2
và B2. Ho đ véc t v n t c đ c v nh hình 2.3b.ạ ồ ơ ậ ố ượ ẽ ư
T ho đ ta th y răng v n t c đi m C và v n t c đi m B thu c khâu 2 là b ng nhau, do v y khâu 2ừ ạ ồ ấ ậ ố ể ậ ố ể ộ ằ ậ
chuy n đ ng t nh ti n t c th i: ể ộ ị ế ứ ờ ω2 = 0.
V n t c góc khâu 3: ậ ố
srad
l
V
CD
C/5
4,0
2
3
3===
ω
Chi u đ c xác đ nh theo chi u Về ượ ị ề C3 nh hình v .ư ẽ
Xác đ nh gia t c:ị ố
21 BB aa =
22
1/401,0.400.
1smla ABB ===
ω
ττ
2222
2
33
32 BC
n
BC
B
DC
n
DC
CC aaaaaaa ++=+==
(2)
Trên ph ng trình 2:ươ
n
DC
a3
: Có giá tr b ng: ị ằ ω23 . lCD = 25 . 0,4 = 10m/s2
τ
DC
a3
: Giá tr ch a bi t, có ph ng vuông góc v i CDị ư ế ươ ớ
n
BC
a22
: có giá tr b ng 0 vì ị ằ ω2 = 0.
τ
22 BC
a
: Giá tr ch a bi t, có ph ng vuông góc v i BC.ị ư ế ươ ớ
Ph ng trình ch còn t n t i 2 n s là giá tr c a 2 gia t c ti p. Cách gi i đ c trình bày trênươ ỉ ồ ạ ẩ ố ị ủ ố ế ả ượ
hình 2.4c.
Gia t c Đi m C bây gi ch t n t i gia t c pháp có chi u h ng t C đi vào D và có giá tr làố ể ờ ỉ ồ ạ ố ề ướ ừ ị
10m/s2. Gia t c ti p b ng 0.ố ế ằ
Gia t c ti p trong chuy n đ ng t ng đ i gi a đi m Cố ế ể ộ ươ ố ữ ể 2 đ i v i đi m Bố ớ ể 2 là
τ
22 BC
a
đ c bi uượ ể
di n b i véc t ễ ở ơ
22cb
có giá tr là : 40 – 10 = 30m/sị2.
Gia t c góc khâu2 đ c xác đ nh: ố ượ ị ε2 = 30 / 0,4 = 75rad/s2. chi u xác đ nh nh trên hình v .ề ị ư ẽ
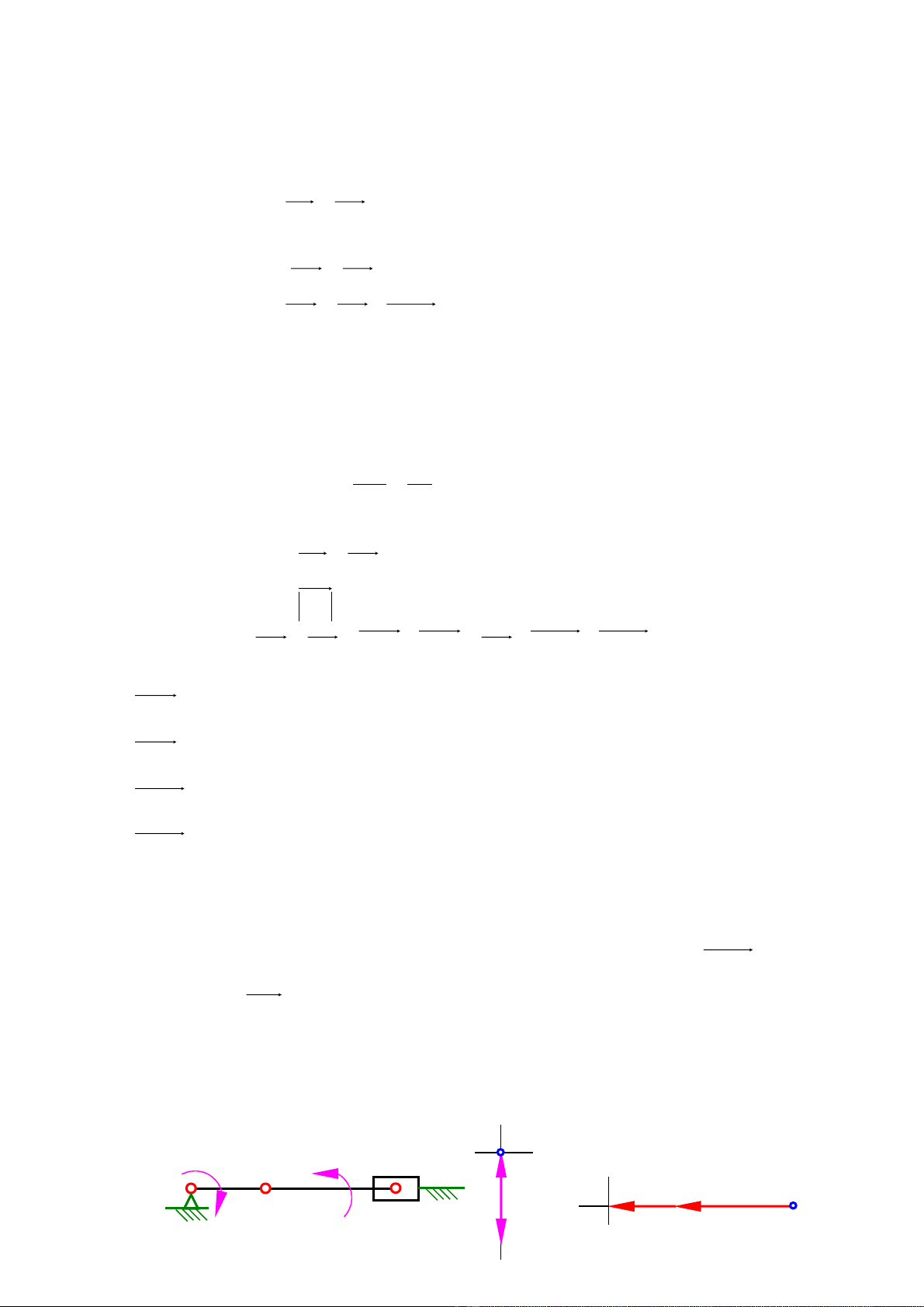
5) Tính v n t c và gia t c đi m C và v n t c góc và gia t c góc c a thanh truy n 2 trong cậ ố ố ể ậ ố ố ủ ề ơ
c u tay quay con tr t (hình 1.5a) khi tay quay và thanh truy n th ng hàng. Bi t tay quayấ ượ ề ẳ ế
AB quay đ u v i v n toccs góc ề ớ ậ ω1 = 20s-1 và kích th c các khâu : 2lướ AB = lBC = 0,2m.
π
b1, b2
c2
n, c2, c3
p
b1, b2
c2, c3
ABC
123
ω
ω















![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)